Делаем раму коптера своими руками. Обмен опытом.

Я извиняюсь, какое у вас образование?
Лесная школа, а что?
Хорош оффтопить мужики
Я писал развернуто, отвалился вай фай, сбросилась авторизация на форуме…
Кратко: нет, не будет из за наличия полетника. Если центр тяжести будет смещен от центра конструкции, выкосы лучше не делать, полетнику придется делать гораздо больше работы, и не факт, что он сможет справится, коптер будет лихорадить. Получится две конкурирующие системы, которые войдут в конфликт, и если полетник не справится со стабилизацией (кривые пиды, ненастроенные регули, вибрации от пропов и движков, плюс нарушенный центр тяжести и в добавок выкосы, которые пытаются по своему рулить коптером), то коптер пойдет в разнос. Лучше оставить все без выкосов, мозгам будет гораздо легче управлять итак далеко не идеальной системой.
вы ссылки мои открывали
Мне без надобности…) Я уже десятки коптеров построил, и с выкосами и без… Разницы нет…
А некоторые помидорщики пару лет воюют с настройками АРМ…)
Принцип один и тот же
Ну, раз принцип один и тот же, снимите видео, где коптер БЕЗ контроллера, но с выкосами провисит горизонтально хотя бы 3 минуты…) Желательно в 30-50 см над землей…)
можно много страниц исписать формулами, но практика выше теории: у знакомого (и не только у него одного) коптеровода коптер 650-й диагонали колбасило не подецки и пидами на НАЗЕ не удавалось ему устранить это пока не поставил выкосы - после этого коптер стал устойчив
кста, выкосы повышают устойчивость и при вертикальном спуске коптера отпадает необходимость в спуске по спирали
Ну, раз принцип один и тот же, снимите видео, где коптер БЕЗ контроллера, но с выкосами провисит горизонтально хотя бы 3 минуты…) Желательно в 30-50 см над землей…)
Перенести ЦТ ниже, как у парашюта, вертолёта Robinson, думаю и коптер без мозга будет висеть.
Перенести ЦТ ниже, как у парашюта, вертолёта Robinson, думаю и коптер без мозга будет висеть.
Даже без выкосов.
ага, будеть висеть на одном месте или подниматься/опускаться cтрого вертикально
можно много страниц исписать формулами, но практика выше теории: у знакомого (и не только у него одного) коптеровода коптер 650-й диагонали колбасило не подецки и пидами на НАЗЕ не удавалось ему устранить это пока не поставил выкосы - после этого коптер стал устойчив
кста, выкосы повышают устойчивость и при вертикальном спуске коптера отпадает необходимость в спуске по спирали
Ха! А у моих знакомых все было с точностью наоборот.
“наоборот”?
т.е. был коптер с выкосами и было все хорошо, а когда убрал стало колбасить? 😉
Кста, коптеры с большими диагоналями часто изначально делают с наклонным расположением лучей так что не нужно специально ставить выкосы
По векторам разложить?
Разложите пожалуйста.
Сравнение коптера с самолетом - это основная ошибка. Коптер стабилизируется гироскопами, и поэтому тяга поднимающегося вверх двигателя сразу уменьшится и без помощи дополнительного выкоса, поэтому всеми дальнейшими косинусами можно сразу пренебречь. А в горизонтальном висении энергия действительно будет тратиться впустую.
У самолета поперечная устойчивость формируется совершенно другими аэродинамическими принципами, за счет изменения угла атаки крыльев при наклоне, и соответственно изменения их подъемной силы. Причем эффект выравнивания присутствует у самолета и без V-образности крыла, из-за бокового скольжения возникающего при наклоне. V-образность его только усиливает, но влияет на него масса других факторов, таких как стреловидность крыла, например.
Выкосы двигателей у коптера, в основном улучшают стабильность по яв, и при спуске в собственных турбулентных потоках, а не горизонтальную устойчивость при висении.
Кстати, на самолетах как раз делается выкос двигателя для компенсации его вращающего момента.
Левая ВМГ из-за большей тяги начнет переворачивать коптер
Ваши рассуждения выглядят привлекательно. Но ведь вращение аппарата обусловлено не силами, а моментами. А моменты сил (относительно центра масс), которые фигурируют в Ваших рассуждениях, не меняются.
“наоборот”?
т.е. был коптер с выкосами и было все хорошо, а когда убрал стало колбасить? 😉
Нет, у них были выкосы, но не было коптера.
Сравнение коптера с самолетом - это основная ошибка.
Ошибки нет, т.к. в обоих случаях есть подъёмная сила, у самолёта за счёт линейного движения крыльев известного профиля и у коптера лопастей ротора с аналогичным профилем.
При наклоне влево или вправо (сравниваем две плоскости самолёта и два ротора коптера и у обоих выкосы),
при крене в одну из сторон, у крыльев или роторов, меняется подъёмная сила по отношению к вектору гравитации, что и приводит к автостабилизации.
Перемещение ЦТ вниз увеличивает эффект.
Пример пушинка- парашют одуванчика, всегда вертикальный полёт.
Стабилизатор для борьбы с ветром - подвесить маятник с большой парусностью.
А уместно здесь вспомнить про центр давления и центр масс, это ближе к самолетам? По моему лучше рассматривать коптер без упоминания крыльев. Вуздушный винт коптера создает тягу( при том что движитель может быть и иной, например реактивный), есть центр масс, тяга винта на плечо получили момент. Есть сила тяжести, для нее плеча нет. Может кто нарисует?
Ошибки нет, т.к. в обоих случаях есть подъёмная сила, у самолёта за счёт линейного движения крыльев известного профиля и у коптера лопастей ротора с аналогичным профилем.
Все верно. Но ошибка в том, что у самолета пассивная стабилизация, у коптера - активная. При наличии активной стабилизации, дополнительное уменьшение тяги двигателя выкосом будет просто нивелироваться. По этой же причине невозможно летать на коптере без гироскопов. Система не в состоянии себя стабилизировать механически. А самолет в состоянии.
Более того - для полета в классическом акро режиме, коптер и не должен себя стабилизировать относительно горизонта, он должен сохранять заданное положение в пространстве. Так что идея пассивной горизонтальной стабилизации крайне нежелательна в этих случаях.
Перенести ЦТ ниже, как у парашюта, вертолёта Robinson, думаю и коптер без мозга будет висеть.
И парашют и вертолет неподходящие примеры. Во первых, один ротор/купол, а не 4, а во вторых, парашют никогда не снижается вертикально вниз, если снос не контролируется парашютистом. Ровно так же как и вертолет не будет снижаться вертикально, если пилот или автоматика не будут вносить коррекцию в циклический шаг… В нашем случае, мозг контролирует тягу на каждом роторе в зависимости от состояния сенсоров…
Зачем спорить, я предложил вариант, который устроил бы всех… Снимите видео, как коптер саморегулируется за счет выкосов, то есть без контроллера совсем, либо в режиме исключающем горизонтальную стабилизацию… Например режим MANUAL в NAZAподобных контроллерах… Тогда вопрос с выкосами закроется раз и навсегда…)
у самолёта за счёт линейного движения крыльев известного профиля и у коптера лопастей ротора с аналогичным профилем
Вы либо путаете, либо притягиваете за уши чисто теоретически…) У винтов с фиксированным шагом профиль крайне редко похож на профиль самолетного крыла…)
Посмотрите анфас на пропы АРС мультироторные или на “треугольники”… А вот вертолетные лопасти и некоторые Т-стайл пропы, действительно имеют такой профиль…
А уместно здесь вспомнить про центр давления и центр масс, это ближе к самолетам? По моему лучше рассматривать коптер без упоминания крыльев.
Отбросьте всё лишнее и рассматривайте векторы подъёмной силы.
Все верно. Но ошибка в том, что у самолета пассивная стабилизация, у коптера - активная. При наличии активной стабилизации, дополнительное уменьшение тяги двигателя выкосом будет просто нивелироваться. По этой же причине невозможно летать на коптере без гироскопов. Система не в состоянии себя стабилизировать механически. А самолет в состоянии.
Я хоть слово про электронику сказал?
И парашют и вертолет неподходящие примеры.
Это примеры доп стабилизации, снижением ЦТ типа маятник.
У верта в полёте ротор в форме воронки, не напоминает выкос у коптера?
Семечка клёна стабилизируется ротором из одной лопасти в форме воронки.
Вы либо путаете, либо притягиваете за уши чисто теоретически…) У винтов с фиксированным шагом профиль крайне редко похож на профиль самолетного крыла…) Посмотрите анфас на пропы АРС мультироторные или на “треугольники”… А вот вертолетные лопасти и некоторые Т-стайл пропы, действительно имеют такой профиль…
Я это знаю,
неужели трудно абстрагироваться от профилей, контроллеров, роторов, крыльев
и зрить в корень, то бишь векторы подъёмной силы.
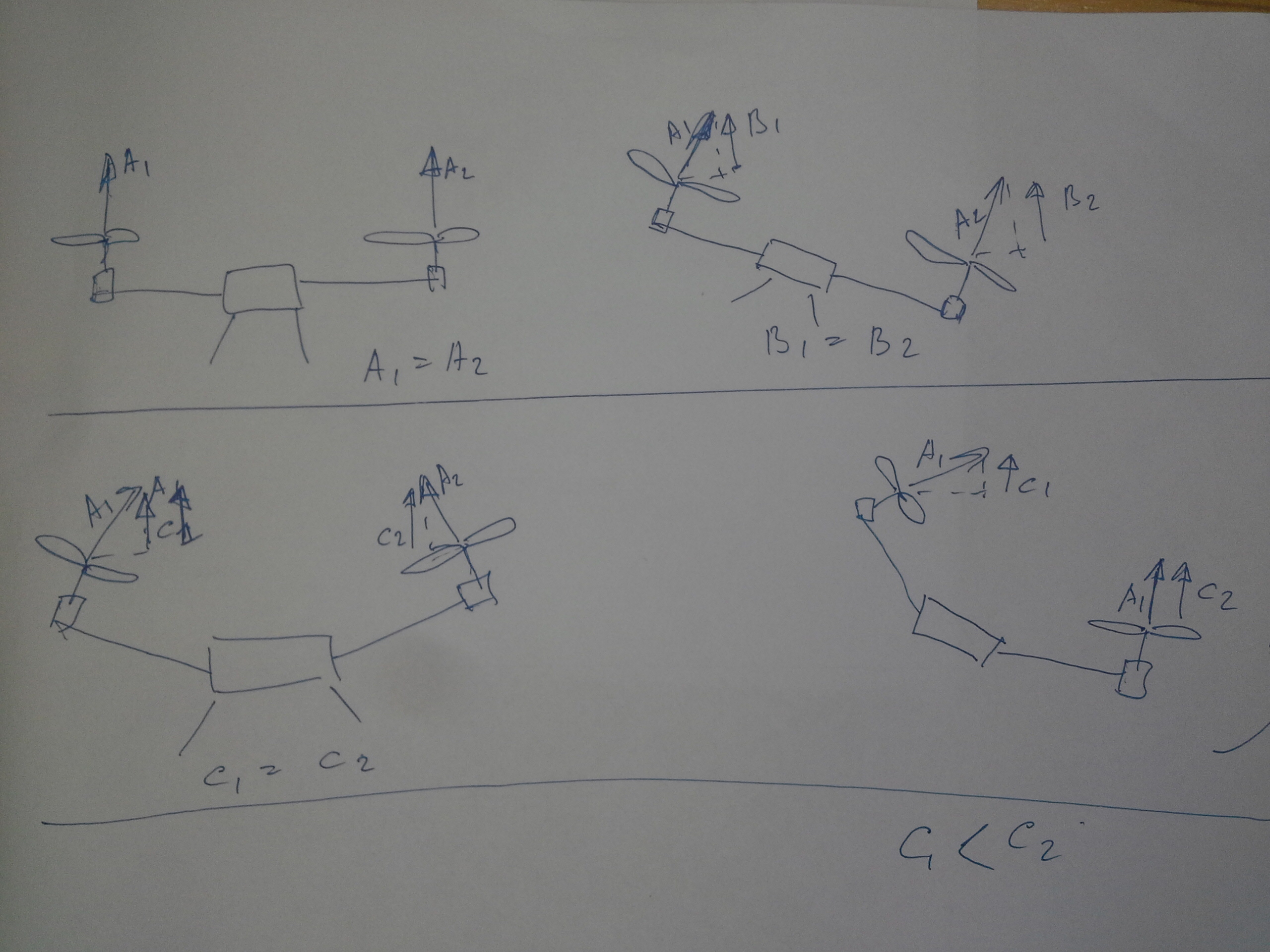
Так понятно?
А моменты сил (относительно центра масс), которые фигурируют в Ваших рассуждениях, не меняются.
Я писал на память, вспоминая школьный курс физики. Мог и перепутать терминологию. Но суть то ясна, независимо от мнений всех тут собравшихся, коптер с выкосами представляет собой систему, которая может сама себя стабилизировать по горизонту, в определенных пределах, если поместить ее в идеальные условия. Такой квадрокоптер в однородной воздушной среде, где есть только воздух, сила тяжести. На практике это сложно реализуемо из за разной тяги двигателей, несовершенства регулей, неидеальных пропов и кучи внешних факторов, начиная полетником, который имеет свой взгляд на стабилизацию коптера, заканчивая ветром и воздушной подушкой у земли.
Придут движки (застряли на границе), попробую сообразить стенд аля весы, два луча и движки с выкосами на центральной опоре, которая будет изображать центр масс. Как куплю аппу (я только собираю коптер, не все купил еще), поэкспериментирую с акрорежимом (или какой режим не дает мозгам вмешиватся в стабилизацию коптера без команды?).