Делаем раму коптера своими руками. Обмен опытом.

Тогда в двойне сомнительно.
Я когда-то облегчал гайку до одури. Меньше 500гр было полётного веса с акком 2200. (счас точно уже не помню)
Так на акке 2200 и родных винтах вылётывал минут 15 без проблем.
С учётом 3300мАч на борту, даже прибавив грамм 150-200, думаю вылететь к 20-ти минутам вполне по силам.
ЗЫ: На аиркаме V4, моторы 2213N 800kv, с винтами 10х3,8 и полётным весом 900гр (акк 3300мАч) как раз налётываю 20 минут до отсечки.
с винтами 10х3,8 и полётным весом 900гр (акк 3300мАч) как раз налётываю 20 минут до отсечки.
У Гави с такими винтами полётное время тоже увеличиться?
на моторах с бОльшим kv (чем 800) полётное время уменьшится.
в первую очередь вес, который и влияет на инерцию - это обычная физика. А уж потом плечо рычага в виде луча
Обычная физика говорит об обратном. Если увеличить длину луча в 2 раза, то инерция (момент инерции) увеличится в 4.
Готовлю к выпуску со своего стапеля трёхпалубную раму трикоптера.
Всё удалось впихнуть в капот 450 верта.
Силовая часть крепления лучей - 1.5 мм текстолит.
Лучи - 12мм карбон.
“Палубы” - 1 мм текстолит. Палубы прикреплены к силовой части рамы через сайлентблоки.
На нижней палубе -приёмник и стабилизация . КК или Copter Control.
На средней палубе - акб. ( на фото 2200 )
Ну а на верхней - ФПВ.
Вес на данный момент 210 грамм.
снизу - место под гопро на подвесе
Здорово. Интерсная конструкция. Ждем фото поворотного узла и и видео облета:)
Перебираю раму на СТЭФ
ставлю раздатку с ГЛ - goodluckbuy.com/multicopter-multi-tri-copter-power…
Готовлю к выпуску со своего стапеля трёхпалубную раму трикоптера.
А теперь туда ножки мотор маунты и понеслась как вес будет расти.
Сегодня на станке выпилили раму для трикоптера. Конструкция и чертежи в Corel - мои. Обработка в CADе - Пашина. Резал все станок.

А вот качающийся подвес (боковые стенки) - ручная работа совместно со сверлильным станком. 😃



Кто-то тут интересовался вариантом защиты винтов, вот случайно наткнулся aviamax.livejournal.com/31199.html

А вот качающийся подвес
хотелось бы это в сборе увидеть - пока не очень ясно как всё будет работать, но выглядит красиво =)
У меня такой вопрос, уважаемые коптероводы…
Помогите разобраться и дать заключение, удачная будет конструкция или же можно что-то поменять или в урну (обоснованно).
Хочу собрать квадрокоптер из имеющихся запчастей.
Вводные такие:
Рама 400мм по осям, моторы Pulso 2203/34 2300kv (тяга мотора 170гр. для 2S), АКБ 850мАч 3S 25/45C, контроллер СС, полётный вес 300гр, винты есть 5" и 8"х4.5", последние можно обрезать до 7".
Из имеющихся деталей можно варьировать только пропами, если ничего не поможет, то могу докупить 2S, но в планы не входит.
Полетит на 3S ?
Полетит на 2S ?
Какие винты выбрать под 3S и под 2S ?
будет ли нормально работать стабилизация?
Полетит ли вообще?
Спасибо!
2300kv
3S
2S надо, а вообще тут все скажут что оборотов многовато… для 3S около 1000kv и ниже моторки для коптера нужны
хотелось бы это в сборе увидеть
Завтра (то есть - уже сегодня…) собиру и выложу фотку. “Пиранья” этот вариант выкладывал как-то. Абсолютно правильное решение и конструкция для трикоптера. Все остальное - ерунда. ИМХО.
P.S. Сам первый трикоптер также строил на отдельной хвостовой платформе, соединенной с лучом через осевую схему качения. Не правильно это…
Пришли запцацки с rctimer, начиаю свинчивать свой вариант Quadrixette:




Рама может складыватся для транспортировки. Провода от моторов будут выходить через отверстие на оси вращения крепежного винта.
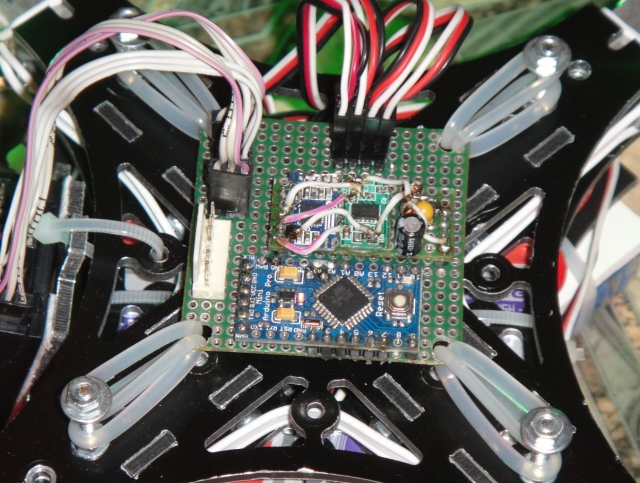
Изначально планировался КУК для мозга, но в дальнейшем установится мультиВии 50х50мм
Класс! такой компактный!
Провёл комнатные лётные испытания .Для достижения более стабильного полёта пришлось вдвое меньшить длину лучей и в итоге на 60 грамм легче.
Провёл комнатные лётные испытания .Для достижения более стабильного полёта пришлось вдвое меньшить длину лучей и в итоге на 60 грамм легче.
а какой там у вас экран?
ну, вот и облетал, видео прилагается
в ветреную, холодную погоду получилось полетать, был маленький краш, ну, ничего не поломалось
в помещении висит идеально (ИМХО для дешевых датчиков)
ПИДы дефолтные
балансировкой моторов и пропов вообще не заморачивался, виброизоляция оправдала себя и на морозе и в помещении, контроллер подвешен жестко и в тоже время достаточно эластично для подавления модуляции на акселе
имеется вопрос, что в конфиге или скетче подкрутить, что бы резвее реагировал, медленно вверх летит, медленно разворачивается по яв, в общем как то не резво реагирует, по этой причине не решился крутануть сальто


а какой там у вас экран?
В качестве монитора использую автонавигатор с видеовходом 4.7 дюйма
не подскажете какой модели?