Делаем раму коптера своими руками. Обмен опытом.

Таким образом Вы получите, разделив 250/8, минимально достижимую чувствительность .
Разделил и получил 31,25 по Вашему такая цена деления в градусах? Много слов, а ясности всё нет. Какие гиры в А3?
Вообще все эти сенсоры не гироскопы, а датчики угловой скорости и соответственно для получения угла требуется интегрирование. Какая точность будет не понятно. И главное почему большая рама должна вызывать сложности?
Для меня достаточно очевидна разница между бюджетным комбо на 6 осей и одноосевым гироскопом, и в конкретных цифрах необходимости нет.
А какие 6 осей у гироскопа? Я знаю XYZ. А ещё три?
Всё не очевидно и зыбко.
А причем здесь линейная величина?
Присоединяюсь к вопросу
Присоединяюсь к вопросу
И главное почему большая рама должна вызывать сложности?
Потому что перекос луча на 960 раме и 250 раме на 2 см даст совершенно разные углы и при этом с огромной разницей по скорости изменения этих углов. А вот последствия от такого перекоса у большой рамы будут значительно большими хотя бы ввиду большей мощности моторов и больших пропов на большой раме.
То есть получается что рама наклоняется меньше и медленнее, а вот последствия этого значительно большие - то есть у вас мозг с датчиками должен работать в разы быстрее и в разы точнее.
но в дорогущих Вуконгах и А3 полетных точек очень мало, по сравнению
буду смеяться )
а сколько точек у А3 и почему вам их мало? )))
вы вообще представляете через что А3 с лайтбриджем управляется? )))
а сколько точек у А3 и почему вам их мало? )))
Это Вы скажите сколько точек, он у Вас, а не у меня.
То есть получается что рама наклоняется меньше и медленнее, а вот последствия этого значительно большие - то есть у вас мозг с датчиками должен работать в разы быстрее и в разы точнее.
Если рама наклоняется медленней, почему мозг должен работать быстрее, да ещё в разы?
почему мозг должен работать быстрее
Для измерения таких маленьких углов наклона и их постоянного отслеживания (гипо-тетически), - и датчики должны выдавать “более подробные” результаты и “по-чаще”. Сколько эт в цифрах - не знаю. Но если данных больше (“типа” знаков после запятой или в единицу времени), то и считать их надо успевать. Но это “теория - рассуждалки”. Мы … академиеФ не кончали. 😃
… Меня только одно смущает :
КАК тогда автопилоты на радиолампах летали?! 😃
Вот презенташка младшего брата А3 - N3.
На 1.10 отстреливает сначала один проп на гексе, потом три. И на фоне что-то говорят, про безопасную посадку на гексе и окте. Про квад информации не нашел
Вот презенташка младшего брата А3 - N3.
На 1.10 отстреливает сначала один проп на гексе, потом три. И на фоне что-то говорят, про безопасную посадку на гексе и окте. Про квад информации не нашел
на кадре это наверно очень сложно осуществить , тут при отказе одного мотора центр тяги смешается в сторону от центра масс и это не очень хороший вариант для стабилизации, видел только на рамах типа рептилия когда задний винт отказывает ,квадрик обладает управляемостью , но там центр масс при отказе заднего винта но там центр масс не выходит из треугольника тяги вот видео
Привет всем. Недавно в кстораме набрел на бамбуковые палочки в цветочном отделе. Те, что хорошо просушены и с пустой сердцевиной, нереально легкие и прочные. По запросу “бамбук квадрокоптер” поиск ничего не выдал.
Кто-то слышал о бамбуковой раме? Получилось бы очень креативно и крепко.
тут при отказе одного мотора центр тяги смешается в сторону от центра масс и это не очень хороший вариант для стабилизации
Дело не в этом - при отказе одного мотора у квадрокоптера появляется момент по оси Z. Потому что при отказе два мотора будут крутиться в одну сторону, а один в другую. В трикоптере этот момент компенсируется наклоном одного мотора.
Проектировал и печатал раму сам. Точнее рамы. Это примерно 450.
Старый полетал пару минут, и после падения в сугроб отправися на полку. Когда я его проектировал то еще мало соображал в печати и особенностях. Новый падал уже не раз и ему пока-что по барабану.
Все красное кроме пропеллеров спроектировано и напечатано.
Нынешний выглядит так
Предыдущий видно на заднем плане тут
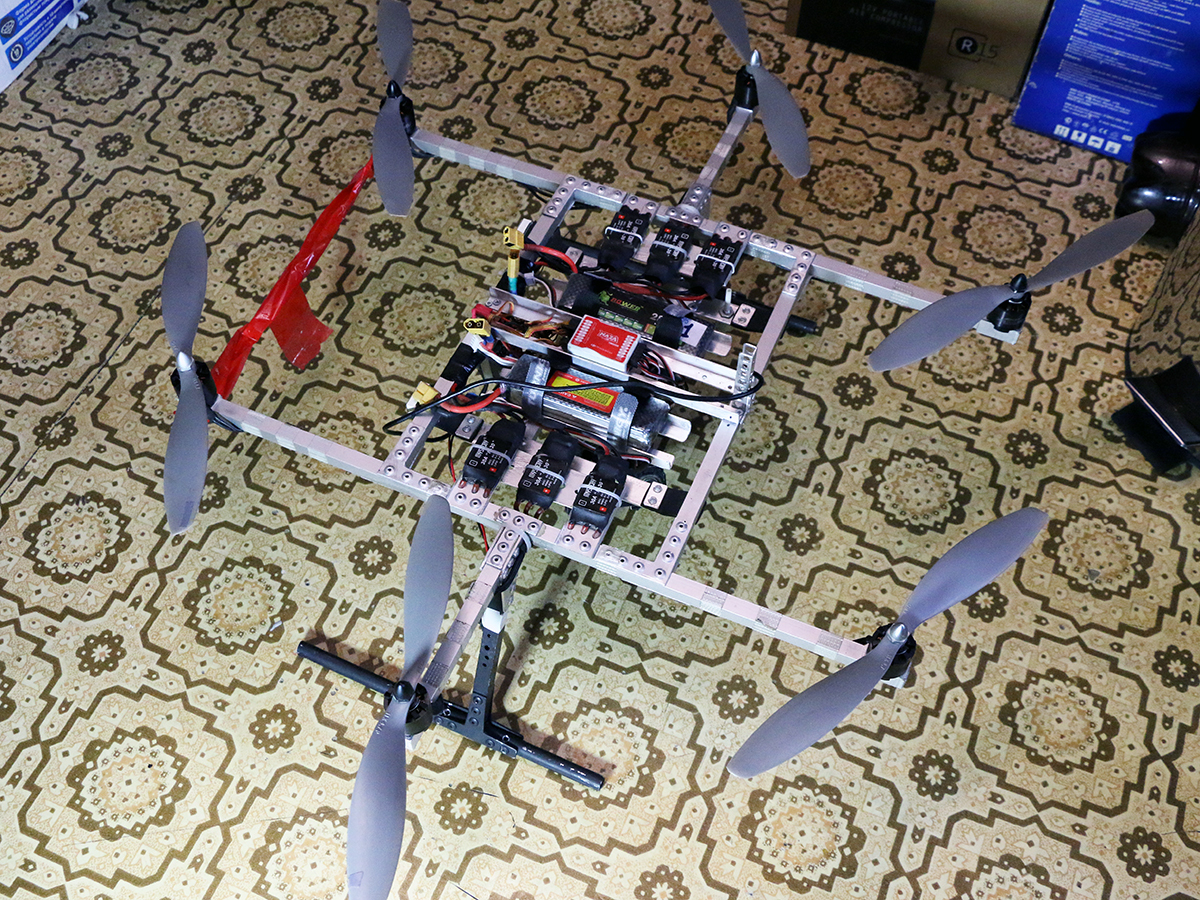
Была задача сделать гексакоптер для видеосъемки. Принял решение поставить подвес камеры на общую площадку с аккумуляторами. На резиновых полосках. Желе полностью прекратилось, но начались другие проблемы. Я так полагаю именно от такого расположения. При разворотах или резком управлении, гекса начинала вести неадекватно и моего опыта хватало увести гексу в безопасное место и уронить с минимальными последствиями. Следующим письмом, если будет необходимость кину отрывок видеофайла странного поведения мой гексы. Вот принцип моей рамы:
Вот гекса почти в сборе. Таких у меня две штуки. Сезон съемок начался, а они валяются без дела. Но у меня есть еще одна беда. Не могу настраивать пульт. Вот тупыка и все тут…(

Дайте подробный сетап - взлётный вес, пропы, двиШки, … пульт. По Назе надо в “назовскую” ветку настройки - принцип и последовательность. Есть видео от Юлиана по Назе. Ножки надо перевязать вне зоны камеры. И площадку Назы (не видно) - тоже можно “на аккумы посадить” - аллюминий “звенит”, моШ из-за этого герАксели бунтуют.
Дайте подробный сетап - взлётный вес, пропы, двиШки, … пульт. По Назе надо в “назовскую” ветку настройки - принцип и последовательность. Есть видео от Юлиана по Назе. Ножки надо перевязать вне зоны камеры. И площадку Назы (не видно) - тоже можно “на аккумы посадить” - аллюминий “звенит”, моШ из-за этого герАксели бунтуют.
Порлетный вес - 2700 гр.
Моторы MT2216-810KB
Акки, спарка 12в.
Пульт Spektrum DX7s
Площадку контроллера NAZA посадить на аккумы? Вообще-то я боялся это сделать. Движки жестко (через двух сторонний скотч) связаны с моторами. Или быстрая реакция герАкселей будет бесполезна, потому что не будет жесткой связи контроллера с моторами. Так как связь с моторами будет уже через резиновые полоски. Я всегда думал, что между контроллером и моторами должна быть жесткая связь. Но утверждать ничего не буду, потому что не знаю. Но это было бы супер хорошим вариантом! Только будет ли это работать? Или может посадить контроллер на мягкую резину, если не на эту площадку с акками???
Вот еще фотки:
Вот эта моя вторая, в принципе такая же, рабочая гекса. С ней вообщем все и происходило. Ее подвес камеры крепится на общей площадке с аккумуляторами, желе пропало полностью.
…Неужели возможно посадить контроллер на эту площадку вместе с камерой?
Вот, на таких резиновых полосках и держится площадка с аккумуляторами, подвесом камеры и регулями.
Вот так все и случилось. При попытке разворота гексу начало колбасить. Уронил аккуратно, это на видео резковато получилось…
Проектировал и печатал раму сам
Поделитесь моделями?
Я вчера свой уронил по глупости. Ноги отлетели, рама и лопасти не пострадала. Падал похоже на авторотации.
Тоже недавно упал, на где то на 35 минуте полета, наза решила войти в землю под углом. Один луч погнуло, у двух моторов появился люфт, третий заклинило, но повращав его вручную вроде расклинило, минус две ноги, ОSD, еще накрылось. Ща пилю новые лучи.
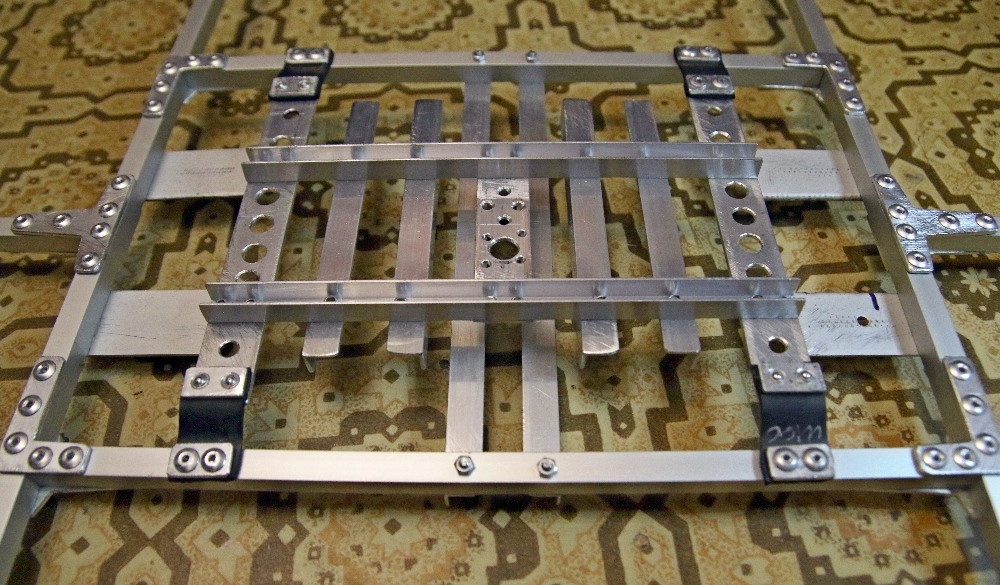
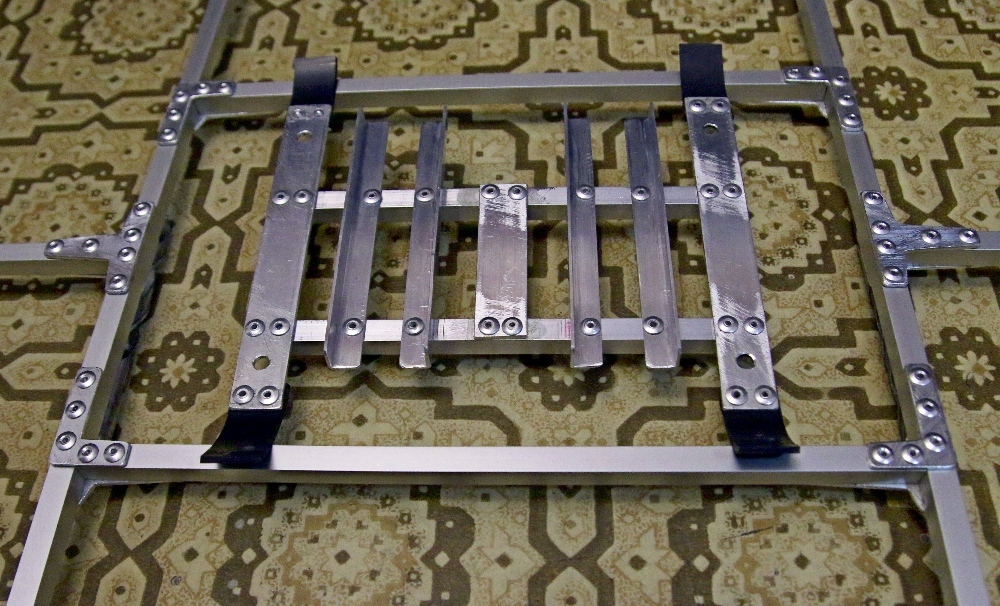
Как такой вариант с “неразрезными” лучами? Как батарею только крепить? (на данном фото верх это низ рамы)
Как такой вариант с “неразрезными” лучами? Как батарею только крепить?
а что мешает еще третью пластинку прикрепить ?(кроме веса)
вот и будет площадка под акки
а что мешает еще третью пластинку прикрепить ?(кроме веса)
вот и будет площадка под акки
Если ось батареи будет под 45гр к оси полёта, т.е батарею расположить вдоль нижнего луча, не будет сильно влиять на полёт?
Если ось батареи будет под 45гр к оси полёта, т.е батарею расположить вдоль нижнего луча, не будет сильно влиять на полёт?
Мне кажется важнее правильная развесовка, тоесть центр масс должен быть соосен центру коптера по вертикали а уж под каким углом батарея будет к направлению движения это чисто эстетический вопрос)))