ArduCopter Mega: порт на обычную Arduino (тестим)

А с H рамой кто-нибудь пробовал использовать?
А в чем различие H рамы от обычной X ?
А с H рамой кто-нибудь пробовал использовать?
H квадрик или H гекса? для квадрика различий не будет (если моторы так же стоят), а для H гексы можно попробовать HEXA X или сделать свой микс
Думаю портер этот оставил тока PIRATES_CRIUS_AIO_PRO_V1.
учитвая цену и доступность платки, думаю что это портирование будет актуально, а если еще и официальный порт ардукоптера, с выходом в тот же день, то совсем хорошо… но опасно =) лето на исходе, а я как и в прошлый раз занимаюсь экспериментами, а не полетами =(
а я как и в прошлый раз занимаюсь экспериментами, а не полетами
Глеб, лучше эксперементируй, так летать не надо 😃
а если еще и официальный порт ардукоптера
Какой же он официальный, если там 90% кода пирата 😃
Какой же он официальный,
Там портировал, вроде, один из разработчиков ардукоптера
Там портировал, вроде, один из разработчиков ардукоптера
Честно говоря странный порт, часть библиотек осталось от 2.6 😃 Смахивает на поделку…
У кого-нибудь есть опыт подключения такого к пирату. Сильно хочеться ток онлайн видеть.
Я цеплял к мегапирату сенсор AttoPilot, все отлично показывает. А этот сенсор, видимо, его клон, так что все будет работать.
Точнее, того, который за 9,67 выложен
ссылку можно?
Отменил заказ, описание неверное указали.
В 2.7 добавили код DMP MPU6000, но он 6axis а коррекцию по магнитометру делают уже на основном проце. Так же у них задействован INT pin - что может означать недоступность этой фичи на некоторых платах (где MPU распаян и добавить проводок проблематично). И самое главное, на APM2.0 - компасс подключен напрямую к процу, а не к AUX пинам MPU, в коде DMP они отключают I2C шину… так что не знаю, будет ли это все работать, т.к. если отключить i2c - отключится и компасс, а включишь I2c - вроде бы перестает работать DMP (но это я не проверял)…
вот такая печалька, вечером буду продолжать портировать 2.7 😃
вот такая печалька
Действительно печалька…
А новоявленный портер использовал DMP?
что может означать недоступность этой фичи на некоторых платах
Как определить это у конкретных платах? Смотреть куда подключени INT?
А новоявленный портер использовал DMP?
Нет конечно, я уже писал, что это недопорт, т.к. большинство библиотек осталось от 2.6. Видимо он перенес только полетную часть от 2.7, а на все остальное забил. Я честно говоря все не проверял, посмотрел что код работы MS5611 остался от 2.6, а в 2.7 там многое поменяли (добавили фильтры).
Как определить это у конкретных платах? Смотреть куда подключени INT?
Да, INT должен быть подключен. Если на платках типа ALLINONE или FreeIMU - он выведен наружу, то в платах типа BV, Crius - навряд ли что либо сделаешь.
В любом случае, DMP - не обязателен, будет и без него работать.
Crius - навряд ли что либо сделаешь
Подпояюсь… все для пирата все для полетов 😃
Желающие попробовать MPNG 2.7 R1 - можно скачать исходники из SVN. У меня нету времени попробовать в полете…
P.S. Залил обычный дистрибутив code.google.com/p/megapirateng/downloads/list
Спасибо за релиз.
Мне вот интресно про DMP. Насколько он поможет в полете? (было бы класно если бы кто-нибудь провел сравнение 2.7 на оригинальном и на пирате) Так же есть настроженность что в последуюший версиях они матиматику полета начнуть точить пот данные с DMP. А нам насколько я понял его не видать. во всяом случае не всем. Боюсь что последуюший прошивки превратяться в нелетабельные для нас… ((( Поправьте меня если я не прав.
Вот-с…
Поправьте меня если я не прав.
Я пока не портировал DMP… посмотрел я на код и пока забил на него… Он все равно в статусе Бета - не включен по умолчанию.
Вот-с…
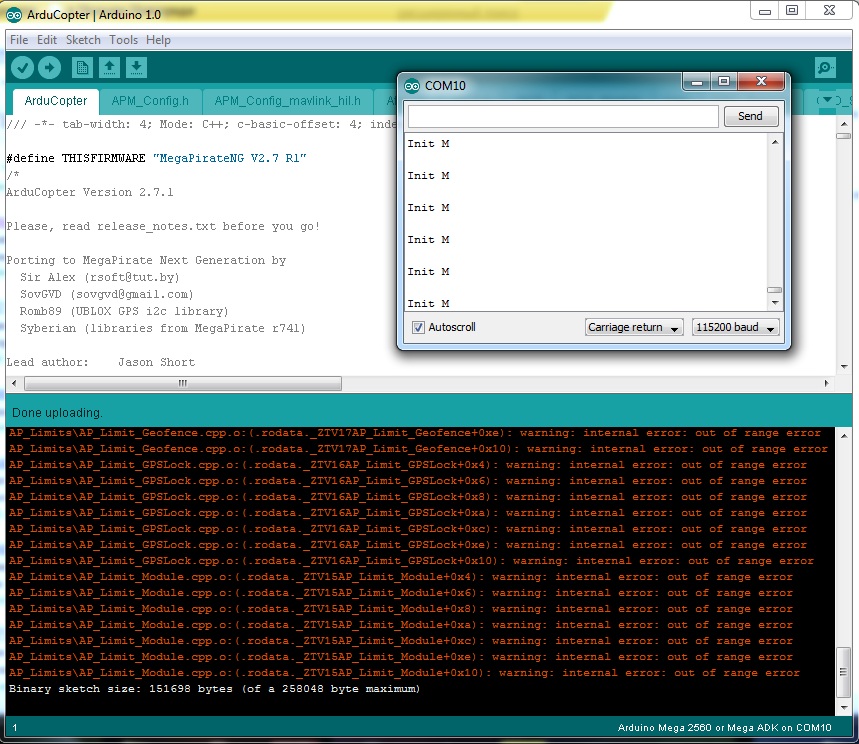
Не ленимся читать README. Надо использовать Arduino IDE 1.0.1
Да, действительно, с 1.0.1 пошло 😃 Давно не было потребности читать ридми, не думал, что требуемая версия компилятора изменилась.
А ведь неплохо летает, черт возьми 😃 Лучше, чем 2.6. Даже пиды, вобщем-то, менять не пришлось. Правда, поднимал коптер в квартире, но, тем не менее, таких диких осцилляций, как раньше, на стоковых пидах не возникло. До конца дня постараюсь на улице протестить.
А ведь неплохо летает, черт возьми
А можно узнать подробно используемую конфигурацию: Дачики процессов регули моторы вес расстояние между моторами и т.д. вообшем думаю понятно.