А давайте обсудим Arducopter - APM

я факты говорю
OFF
Какие н@х… факты, тащите суда ваше видео которое вы удалили где Ваш Киборг носится над автотрассой в неуправляемом состояние выискивая жертву. И Вы это называете миссиями? Вы хотите сказать что на его борту всё в порядке. О какой Вы со своей стороны статистике говорите?
За такие полёты уголовные дела заводить надо.
OFF
Какие н@х… факты, тащите суда ваше видео которое вы удалили где Ваш Киборг носится над автотрассой в неуправляемом состояние выискивая жертву. И Вы это называете миссиями? Вы хотите сказать что на его борту всё в порядке. О какой Вы со своей стороны статистике говорите?За такие полёты уголовные дела заводить надо.
при чем тут это видео, не надо из контекста выдергивать. Была заснята проблема, да. скажите у кого их нет, только у тех кто не летает. А судить по этому видео о компасе, тоже самое что о вас по вашей фотографии 😉
не удержался от офтопа.
Помогите сегодня получил ARDUCOPTER v2.6 при подключении Mission planer виснет на считывании параметров (я думаю при иницилизации датчиков) пробывал разные прошивики , хотя софт заливаеться, 3.3в есть, также можно подключиться по терминалу, посмотрел в терминале датчики не работают ни барометр ни акселерометр ни компас? Питание 5в и 3.3 в норме. Залил в менгу 32U2 новую прошивку, без успешно.
Подозрение на шину I2C как проверить? Плату мыл спиртом, смотрел под лупой, оптически все в норме.
ПОМОГИТЕ пожалуйста!
заранее спасибо всем.
Без паники проверить напряжения на мегах и на сенсорах.
И подключится через закладку терминал.
Если чего будет он тебе там напишет.
И за одно узнаешь, хоть что за прошивка там.
Без паники проверить напряжения на мегах и на сенсорах.
И подключится через закладку терминал.
Если чего будет он тебе там напишет.
И за одно узнаешь, хоть что за прошивка там.
Напряжения в порядке, первым делом проверил.
Да подключаеться через терминал, прошивка последняя, работает как бы на 50%, но написал продавцу сегодня вышлет новую, посмотрим. Буду ждать.
Приехал вот этот GPS-модуль для APM2.6
Чё то не могу его прошить 3DR-Ublox…
Лезет вот это окно
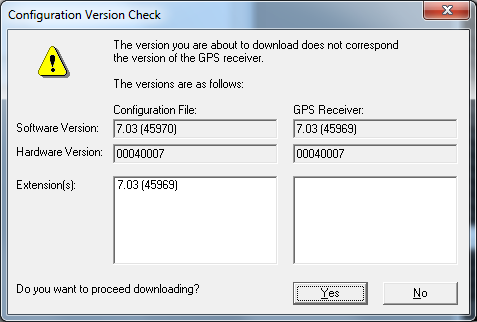
Колонка слева пустая.
На Receiver—>Action—>Revert Config, ноль внимания.
После завершения процесса прошивки предупреждает об ошибке и рекомендует верификацию. Окно не закрывается.
Прошиваю через FTDI.
APM модуль не видит. Пишет No GPS…
Хотя в u-center отрабатывает спутники и показывает 3D. И после загрузки файла с ошибками и после сброса в стандарт.
Пробовал версии u-center 7.0.2 и 8.0.1…
Что ему надо? а?
Лезет вот это окно
Опять же без паники! Окошко с проверкой версии никак не влияет ни на что. Жмем “Yes”, дожидаемся, когда пробегут все команды (не обращаем внимание на ошибки), передергиваем шнурок, переключаем скорость на 38400 и повторяем заливку конфига. Ошибок не будет.
Хотя в u-center отрабатывает спутники и показывает 3D. И после загрузки файла с ошибками и после сброса в стандарт
После заливки 3DR конфига приемник не отдает “лишние” параметры и список спутников с уровнями сигналов не видно. это нормально
APM модуль не видит. Пишет No GPS…
Очевидно конфиг не прописался, он, в том числе, меняет скорость на 38400. APM пытается “снюхаться” с GPS-приемником именно на этой скорости
прошивка последняя
Попробуй через MP залить крайнюю прошивку и потом померить 3.3в. Иногда продавцы заливают некую “модифицированную” прошивку, которая включает стабилизатор 3.3в, соответственно заливка родной прошивки этот стабилизатор выключает.
BT не работает со встроенными модулями ноутов это раз, и не работает со стандартными дровами это два.
Немножко поковырял тему.
Оказывается, проблема не в МП, а в .NET.
Так что у кого МП работает через родной виндовый блютус стек, поделитесь версией .NET framework, плиз.
Теоже самое поимел при попытке прошить через FTDI
Потом не стал заморачиваться и прошил через APM, все встало, и как оказалось даже проще.
В посте #10432 давалась ссылка от hatuul.
Сообщение от Freepooh
кодовое слово: “PILOT_VELZ_MAX”
кажись не совсем то,как японял это максимальная вертикальная скорость,а не скорость реакции на стик газа в альтхольде,ведь не в авто режимах на стик газа реагирует адекватно.
а по моему то
PILOT_VELZ_MAX - максимальная скороподъемность, которую может задать пилот стиком газа при управлении коптером в режимах, использующих удержание высоты по барометру(Loiter, AltHold, Sport). По умолчанию 250,поставить хотя бы 500.
поставил этот параметр 500,но набор высоты в альтхольде как был тормознутым так и остался,к тому же очень не удобно что принулевом положении стика газа в альтхольде моторы не останавливаются,в критический момент просто не успеваешь переключиться на стабилайз,сколько пропов в этом режиме уже угробил,даже и боюсь теперь в альтхольде летать,жаль третьей руки нет)))
Жмем “Yes”, дожидаемся, когда пробегут все команды (не обращаем внимание на ошибки), передергиваем шнурок, переключаем скорость на 38400 и повторяем заливку конфига. Ошибок не будет.
Спасибо, помогло… именно перецмык шнурком. Хотя, я изначально пытался прошится на скорости 38400.
Но как бы то ни было - паника прошла. 😃
У окна 9 спутников, hdop 1.83
поставил этот параметр 500,но набор высоты в альтхольде как был тормознутым так и остался,к тому же очень не удобно что принулевом положении стика газа в альтхольде моторы не останавливаются,в критический момент просто не успеваешь переключиться на стабилайз,сколько пропов в этом режиме уже угробил,даже и боюсь теперь в альтхольде летать,жаль третьей руки нет)))
Там два параметра
Pilot maximum vertical speed (ArduCopter:PILOT_VELZ_MAX)
The maximum vertical velocity the pilot may request in cm/sRange: 50 500
Increment: 10
Units: Centimeters/Second
Pilot vertical acceleration (ArduCopter:PILOT_ACCEL_Z)
The vertical acceleration used when pilot is controlling the altitudeRange: 50 500
Increment: 10
Units: cm/s/s
То есть максимальная скорость и ускорение.
Вам я так понимаю хочется более живого отклика, соответственно ускорения.
Хотя если честно если хочется погонять то это в стабе или акро.
А остальные валенко режимы просто повисеть 😃
мне надо чтоб квадр в альтхолде четко реагировал на стик газа как и в стабилайзе,а то бывает подлетишь к потолку,а он по инерции так и продолжает набор высоты,дергаешь стик вниз а он не реагирует,и только через пару сек. камнем начинает падать.погонять,честно,не хочется мне бы хотя б плавно летать научиться)))
Вам я так понимаю хочется более живого отклика, соответственно ускорения.
т.е. надо увеличить параметр ArduCopter РILOT_ACCEL_Z? на сколько его увеличить?
…на сколько его увеличить?..
Странный вопрос… По вкусу!.. PS пора помидоры пускать в ход… Модератор! АУ!
пора помидоры пускать в ход
а что уже созрели?какой здесь народ щедрый,на базаре кг вон сколько стоит,а тут на те даром.))))а так по делу,конечно попрактиковаться хорошо,но готовое проверенное решение лучше,в общем откланюсь проверять,сорри за офф.
[QUOTE=Freepooh;5088626]Опять же без паники! Окошко с проверкой версии никак не влияет ни на что. Жмем “Yes”, дожидаемся, когда пробегут все команды (не обращаем внимание на ошибки), передергиваем шнурок, переключаем скорость на 38400 и повторяем заливку конфига. Ошибок не будет.
А мне не подскажете ? Та же ситуация, не прошивается через APM, 3d-fix не показывает, хотя сам жпс видит - красным обозначено No-fix. Много раз передернул шнур, попробовал и разные скорости и реверты - всё равно ошибка. И пред.версию не показывает.
Может дело в длине шнура 1.8м? Это много ?
Та же ситуация, не прошивается через APM, 3d-fix не показывает, хотя сам жпс видит - красным обозначено No-fix
А вы в курсе что для прошивки через апм надо сначала перепрошить сам апм ?
А вы в курсе что для прошивки через апм надо сначала перепрошить сам апм ?
😃 само собой я все-все операции проделал. И именно почитав предыдущую ситуацию, один в один, как у меня, я попытался проделать всё тоже самое и результат нулевой. Точнее даже по моему стало хуже - теперь когда прошиваю APM обратно и запускаю ПМ он говорит Bad GPS Health.
Задам глупый вопрос - “передернуть шнур” - этож вытащить его и обратно вставить ? Просто уже не знаю где еще искать причину.
Программатор купил, но он еще в пути. Поэтому пробую через АРМ.
мне надо чтоб квадр в альтхолде четко реагировал на стик газа как и в стабилайзе,а то бывает подлетишь к потолку…
Очень умно использовать альтхолд в помещении… особенно возле потолка, где завихрения сводят сума бародатчик.
мне бы хотя б плавно летать научиться)))
Вам бы с КУКа начинать тогда следовало бы, как и многим начинающим коптероводам.
…не прошивается через APM…попробовал и разные скорости и реверты…
Это как?
Давайте с самого начала:
ПРОШИВАЕМ ЧЕРЕЗ APM:
Открываете среду Ардуино, в свойствах выбираете плату и порт
Открываете пример: Файл -> Примеры -> Communication -> MultiSerialMega
Жмете кнопку “Загрузить”. APM теперь просто транслятор сигналов на скорости 9600
Идете в U-Centre, загружаете конфиг, получаете ошибку, игнорируете
Открываете среду Ардуино, в свойствах выбираете плату и порт
Открываете пример: Файл -> Примеры -> Communication -> MultiSerialMega
Редактируете две строчки:
Serial.begin(38400);
Serial1.begin(38400);
Жмете кнопку “Загрузить”. APM теперь просто транслятор сигналов на скорости 38400
Идете в U-Centre, меняете скорость на 38400, загружаете конфиг, уже не получаете ошибку, радуетесь
Что может быть проще?
PS ну настройки APM ведь сохранили? Прошиваем любимую прошивку и восстанавливаем настройки только ручками!
Программатор купил,
Программатор не нужен
PS Кстати, раз уж мы в среде Ардуино, можно почистить EEPROM:
Открываете пример: Файл -> Примеры -> EEPROM -> eeprom_clear
Редактируете строчку:
for (int i = 0; i < 4096; i++);
Жмете кнопку “Загрузить”. через полминуты память чиста!
Это как?
Сначала залил в АРМ пошивку для прошивки GPS. Потом в программе Ublox подключился при скорости 57 и попытался залить через Tools файл конфигурации. Выдало ошибки - все по таймауту. У Саши (Раефа) на сайте есть подробная инструкция. Там сказано, что если не показывает предыдущую версию прошивки, то сделайте реверт конфига. Короче менял скорости, делал реверты , передергивал шнур и все это в разных-разных комбинациях и сочетаниях и в итоге НОЛЬ. Только еще и Bad GPS Health появилось. Все таки мне кажется, что проблема в шнуре - он простой с 2-мя разъемами на концах и длиной 1.8м. Простой - имеется ввиду что без каких либо прибамбасов защитных и фильтровальных на нем.