А давайте обсудим Arducopter - APM

дык и в планере так же, можешь или тумблер настроить , или крутилку. Это ж от аппы зависит - на каком тумблере или канале будет переключатель режимов.
Дело не в номере канала, а в том что полетных режимов явно больше 3х. Для примера, в Multiwii назначение каналов мне кажется, сделано удобнее - на какой хотим, на такой и вешаем нужную функцию.
А где настроить каналы 6,7? В wiki написано not currently used:
Channel 5: Mode Selection, to tell ArduCopter what mode you want to be flying in at any point (manual, auto, altitude hold, etc). Typically you will assign your RC transmitter’s three-position switch to Channel 5 for this purpose. A full list of modes is here
Channel 6: Not currently used, but reserved for camera controls
Channel 7: Not currently used, but reserved for trimming
все 6 режимов управляются с одного канала этого достаточно и удобно.
если переключалки на 5-6 уровней нет то можно намиксить пару выключателей на передатчике с тем чтобы получить 6 уровней.
но с такой комбинацие переключателей легко запутаться в полете, особенно если ситуация внештатная
чтобы решить проблему народ покупает 6 позиционный вращательный переключатель,
я сделал электронный
все лето с ним летаю и на arducopter и arduplene - без нареканий.
по рекомендации братьев по цеху думаю вывести допкнопку первого режима рядом со стиком газа под указательный палец и добавить бипер при переключении
все лето с ним летаю и на arducopter и arduplene - без нареканий.
Дык дайте ж схемку!!!
Дык дайте ж схемку!!!
схемка, прошивка, коменты
в блоге на этом сайте rcopen.com/blogs/99365/14414
у меня на сайте hobby.msdatabase.ru/project-updates/…/modesw
на заводе заказывал лист с 20 платками, еще несколько осталось, могу послать по почте
если что пишите kozin@mail.ru
а интересно на аппе туринжи мона такое сделать, что б на дисплее высвечивалось название режима?
Есть же какойто мод под прошивку er9x специально под ардукоптер, надо найти и прочитать что он может.
схемка, прошивка, коменты
Спасибки😁 Извините, если спрошу глупость - можно развить схему до 8ми позиций используя ноги с ADC0 до ADC7? А в скетче переписать это:
BtnLevels[14] = 0;
BtnLevels[15] = 84;
BtnLevels[16] = 127;
BtnLevels[17] = 169;
BtnLevels[18] = 255;
Хочется вывести только кнопки со светодиодами, а мини спрятать внутри…
безусловно можно спаять на любой ардуинке или плате прототипирования, можно и 8 но
- если к ардукоптеру то у него всего 6 уровней распознается
- пункт 1 я думаю неспроста, чтоб обеспечить надежность попадания при не очень точной аппаратуре
14 - 18 это номера для digitalwrite соответствующие аналоговым пинам a0 - a4 на которые навешаны кнопки (хоть пины и аналоговые но digitalwrite к ним применим)
можно использовать любые другие свободные пины ардуины например аналоговые a5 a6 их номера будут 19 и 20,
в циклах только поменяйте их обработку
for (int i=14; i <= 18; i++) на for (int i=14; i <= 20; i++)
и пропишите для них значения ппм соотвествующие нужному уровню выходного напряжения. принцип расчета значения прост - строите отрезок от 0 до 255 и делите его на нужное число точек - у вас восемь две на краях а остальные делаем так чтобы точки попадали в середины отрезков
Други! Рискуя получить помидором в череп, хочу попросить летающих по маршруту поделиться пидами. Я на грани нервного истощения… Моё сооружение бодро стартует в направлении первой точки, доезжает, поворачивает в сторону второй и тут начинается расколбас, увеличивающиеся по амплитуде колебания. Но прёт в правильном направлении. Приходится подхватывать и делать РТЛ. В стабе хорош, в алт-холде гуляет метра 1.5-2. Малое Р на троттле? Чем регулируется устойчивость на курсе?
Подлец таков: трёха, моторы 2628 1000kv, винты 10х4.7, АРМ2, реги 15-18А перешитые, 5Ач батарейка, весит 1100г.
Заранее признателен
поворачивает в сторону второй и тут начинается расколбас, увеличивающиеся по амплитуде колебания
Я думаю это просто баг прошивки.
Вот чем то похожие проблемы:
…ning.com/…/possible-yaw-twirl-feature-in-2-7
…ning.com/…/another-2-7-0-feature-nav-throttle-pro…
Народ, а кто-нибудь на смартфоне copter-gcs запустил нормально? У меня только раз соединилось, при попытке нажать на одну из кнопок, программа вылетает. Смартфон перезапускал, результат тот же.
Я думаю это просто баг прошивки
А кстати, какая сейчас самая адекватная прошивка для полета по точкам? Раньше вроде 2.1 хвалили…
Я думаю это просто баг прошивки.
Чёрт, не знаю… Щас залил 2.7.1 с оригинальными пидами - та же хрень, если не хуже…
Народ, а кто-нибудь на смартфоне copter-gcs запустил нормально?
У меня так и не пошло, слетает всё время…
А может скорость полета ограничить, вроде ж можно задать? Может на меньшей скорости расколбаса не будет.
А может скорость полета ограничить, вроде ж можно задать? Может на меньшей скорости расколбаса не будет.
Да он летает в ручном режиме мегастабильно. А в автомате переруливает, корректирует ошибку с переруливанием и т.д. по нарастающей…
Я и имею в виду, ограничить скорость во время миссии, там вроде был такой параметр. Хотя не знаю, поможет ли.
летал на “авто” без проблем на 2.5.3 из пидов на 10% снизил stabilize control p.
была одна проблема - снижался “ступеньками” режиме “landing” которое на смог толком излечить пидами удержания высоты.
в 2.7.1 посадка очень красиво осуществляется, авто не пробовал.
родилась мысль что снижение ступеньками возможно изза параметра троттл трим который по идее должен быть равен процентному значению газа для ховер, у меня на модели ховер гдето на 55, а по дефолту стояло 45, возможно изза этого вяло стабилизирует высоту вверх и бодро вниз, что хорошо заметно при посадке
Кстати про высоту, никто не разбирался, высота в режимах Alt Hold и Loiter держится только по барометру, или GPS тоже участвует?
Похоже, авторы там у себя совсем расслабились и забили на проект.
На днях пришел APM 2.0 вот с таким стикером:
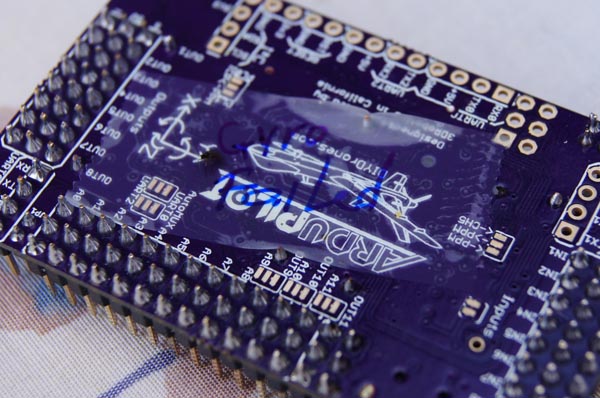
Прошил, подключил - и впрямь, датчики по нулям. Потом завис на тесте гироскопов и после этого постоянно выдает ошибку при коннекте.
Одного не пойму - то ли они русских так не любят, то ли им вообще на всё плевать, но отсылать брак, на котором написано, что это брак - это слишком жестоко.
мда, косяк ))),
отписались? что говроят?
Откуда заказывали? С дронов?
2.0 заказывал с diydrones, как напишут - сообщу.
До этого брал 1.0 на jdrones - тоже глючит гироскоп.