А давайте обсудим Arducopter - APM

github.com/diydrones/…/AP_MotorsQuad.cpp
даже “картинка” есть…
// front right: 70 degrees right of roll axis, 20 degrees up of pitch axis, no yaw
add_motor_raw(AP_MOTORS_MOT_1, cosf(radians(160)), cosf(radians(-70)), 0, 1);
// back left: no roll, 70 degrees down of pitch axis, full yaw
add_motor_raw(AP_MOTORS_MOT_2, 0, cosf(radians(160)), AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 3);
// front left: 70 degrees left of roll axis, 20 degrees up of pitch axis, no yaw
add_motor_raw(AP_MOTORS_MOT_3, cosf(radians(20)), cosf(radians(70)), 0, 4);
// back right: no roll, 70 degrees down of pitch axis, full yaw
add_motor_raw(AP_MOTORS_MOT_4, 0, cosf(radians(-160)), AP_MOTORS_MATRIX_YAW_FACTOR_CW, 2);
20 20
3_____________1
|
|
20 | 20
/ \
2 4
искомая величина…
чёт бред нарисован 😦 короче 1 - это 1-й выход на мотор, 3 - 4-й выход, 2 - 3й и 3 - 2-й, 1 и 3 не управляют курсом, a 2,4 не управляют креном - во как стандартный Y4
Всем доброго времени суток!
Кто нибудь юзает V компоновку квадра? Подскажите, где найти порядок и направление вращения моторов. В планере последнем есть опция этого конфига, но не понял, как подключать моторы.
У меня V компоновка, порядок и направление точно как в X. Кстати на дидронсах обсуждали неоднократно, что по прошивке V и Х на раму V разницы в полете не ощущали.
На 3.1.5 прошивке, после автотюн, прекрасно летает!
У меня такая же хрень. Эту задержку видно даже в mission planer. Думал, что мне кажется, а оно вона как…
На платке от Sergdoc такого тоже нет. Прошивка 3.2-rc1. Реакция на стики, как и положено, мгновенная.
Скажите пожалуйста, а куда исчез параметр RSSI_RANGE ? Смотрел в полный список параметров - вижу только RSSI_PIN.
Или это уже не модно (ставить параметр 3,3), модно подтягивать 3,3 вольта до 5? (чем это кстати делать попроще - резистором воткнуться в 5 вольт?)
Спасибо! Значит порядок подключения такой же, как в Х компоновке. Получил вчера АРМ 2.7 из ХК. Обещали вывести на джампер выбор компаса внутренний/внешний. Пока не понятно, где этот джампер находится. Но это уже детали. Разберемся. Ставлю этот контроллер на новую раму, несимметричную. В последнем планнере есть отдельный чекбокс для V рамы. Может и в ПИДах учтено распределение нагрузки по моторам. Будем пробовать.
парни кто ни хочет воевать с глюками новых прошивок,не раз обсуждалась 3,0,1 самая стабильная,сам на ней летаю глюков пока не словил
ХМММ. А я тут словил глюк, именно на этой прошивке. Летал-себе летал у меня коптер в альтхолде, а потом кеееек выключит движки! начал кувыркаться, а потом кееек включил движки на полную! Получилось так, что он с 20 метров да ещё на полном газу хренакнулся башкой об планету! Звук был такой - как на СТС рекламная заставка про божью коровку, влетающую в телевизор. Минус 2 карбоновых пропа (ещё два “погрызло” - тоже поменял), погнуло валы на двух движках, банку под мозги - в клочья (мозги целы на удивление - банка СПАСЛА), так кое-чего погнуло из геометрии.
Коптер восстановил, буду ещё тестить.
Предполагаемая причина - я не калибровал компас на месте (а там вроде магнитные аномалии). ХОТЯ… Загружал KMZ - оказывается у меня коптер во время полета пару раз залетал вглубь земли (о, мечта горнопроходчика!). Вот и чешу репу - глюк баро, или чего…
Кто-нибудь хочет логи посмотреть?
…
Кто-нибудь хочет логи посмотреть?
Я не большой специалист, ради интереса спортивного взглянул бы 😃
выкладывай 😃
На платке от Sergdoc такого тоже нет. Прошивка 3.2-rc1. Реакция на стики, как и положено, мгновенная.
У Вас как приемник подключен ?
У кого по s.bus вроде задержек на замечают.
- разрабы упоминают особенности именно 3.2 rc2. Говорят в rc3 пофиксят.
- разрабы упоминают особенности именно 3.2 rc2. Говорят в rc3 пофиксят.
Для платы F4BY (она же плата от SergDoc) совсем другой код обработки для S.BUS, PPM/PPMSUM. Плюс нет посредника в виде io борды.
Для платы F4BY (она же плата от SergDoc) совсем другой код обработки для S.BUS, PPM/PPMSUM. Плюс нет посредника в виде io борды.
А можно в этом месте поподробнее ? 😉
Код обработки можно глянуть где-нить ?
-
как именно может io борд вносить задержки ? В особенности как он может вносить задержки для PPM и не вносить их для S.BUS ?
-
собственно разве на F4BY имеется PPM ? Там же вроде только PWM ?
Код обработки можно глянуть где-нить ?
“Все я сдался… Устанавливаю назу))))” Правильное решение для тех кто хочет летать а не эксперементировать с падениями и улетами
Не факт что правильное.
Посмотрите ветку где НАЗАпоклонники так же мучаются пытаясь настроить шоб все летело.
И там у них тоже периодически аппараты улетают на историческую родину,падают,переворачиваются.
Короче там тоже не все так просто как хотелось бы.
Хотя я тоже задумался-а не прикупить ли и мне назу-лайт.
Подниму проблему…
В MissionPlaner не калибруются радиоканалы. Только один (Roll) и все. Остальные “молчат”.
Аппа: Турниджи 9х (прошивка ex9r), приемник и передатчик Фрскай.
Попробовал прошить PPM encoder. Ничего не изменилось.
Все началось с того, что заменил Frsky приемник, т.к. бывший сгорел.
Думал, что приемник брак. Но когда калибрую регулятор стик газа работает, а в MissionPlaner нифига…
Что может быть?
Все началось с того, что заменил Frsky приемник, т.к. бывший сгорел.
Что на что заменили? Использовался/используется PPMSUM?
Что на что заменили? Использовался/используется PPMSUM?
На такой же заменил (D8R-IIplus). Не слышал про такое, следовательно не используется.
Не слышал про такое, следовательно не используется.
От приемыша сколько проводов к плате идет? 1 или 8?
От приемыша сколько проводов к плате идет? 1 или 8?
Только один (Roll) и все. Остальные “молчат”.
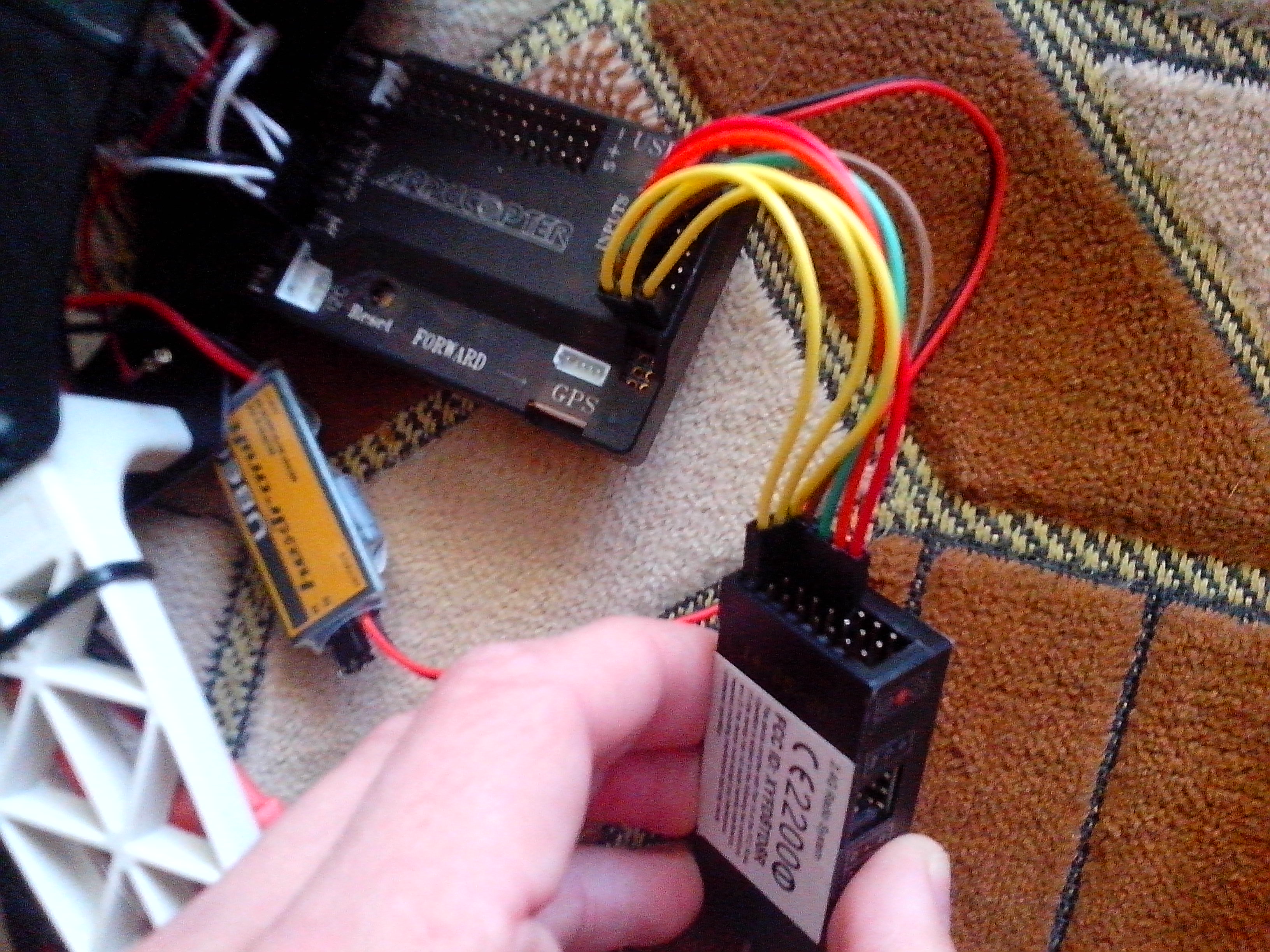
Так, судя по фото, только он и заведен на АРМ.
От остальных каналов - земля
Не слышал про такое, следовательно не используется
rcopen.com/blogs/43414/17399
Так будет 1 проводок.
Втыкать вот так 
Боюсь после предыдущих тыков, что то уже умерло.
И не забываем, минусики к минусикам подключаем, плюсики к плюсикам.
На фотке минус в канал ушел и так далее …