А давайте обсудим Arducopter - APM

Прочитал. Но похоже неисправен сам повермодуль.
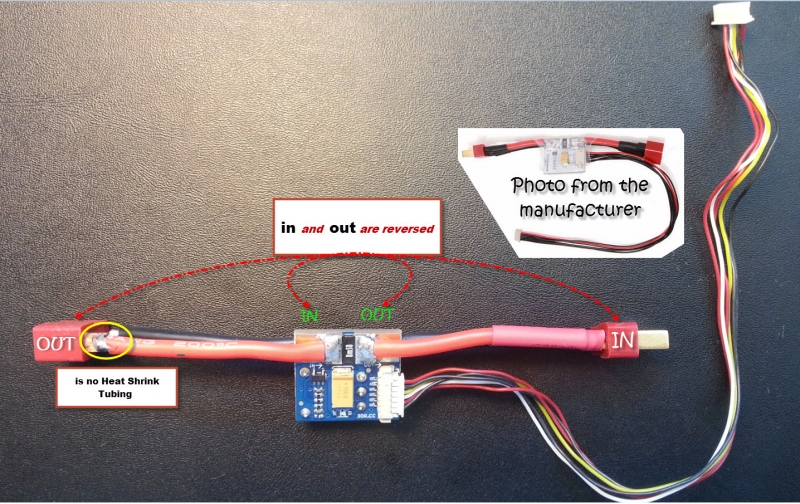
Power module тоже с Бангуда? Я просто оттуда брал и мало того что он выдает 5 вольт вместо 5.2(в итоге на плате напряжение проседает до 4.6-4.7), так китайцы перепутали вход с выходом, хорошо что заметил вовремя, а то спалил бы все к чертям…
в общем питаю все дело от регулятора, (4в1 он как раз у меня выдает +5.2 в) а модуль использую только для мониторинга напряжения, вынул из шлейфа два провода с питанием(Кстати, а так вообще можно делать?))))
чистка это setup - erase, затем reset? Делал сразу после прошивки.
это просто наболее часто встречающееся упущение приводящее к непредсказуемым последствиям.
неследует необдуманно оптом загружать параметры от другой версии прошивки, если сделали чистку вручную устанавливайте нужные вам параметры или в крайнем случае через функционал сравнения.
Помогите, кто знает… Как проверить барометр? Делаю так: подключаю вынутую из корпуса плату APM 2.6 по usb, в мишн планере Terminal: Test: baro. Выдает строку: “Alt: 0.00 m, Raw: 393221.9 Temperature: 20.0”. Значения не меняются ни при каких манипуляциях с платой. Думал, что сдохла микруха барометра MS5611-BA03, купил такую же на ali за 7.50$, перепаял. Результат теста барометра остался тот же. Вопрос: что за хрень? Может при тестировании барометра нужно включить AltHold? Или плата APM накрылась женским половым органом?
Как проверить барометр?
В планере показания барометра должны постоянно плавно меняться в пределах полметра. Я считаю, это хорошо.
Проверьте работу стабилизатора 3.3В.
3.3 В я проверил первым делом. Все в норме (3.28 В)
Ну тогда попробовать дунуть в него. Если не помогает, то видимо или плохо второй запаяли, и первый плохо был припаян, либо в другом месте обрыв проводников i2c.
А как прозвонить? Он напрямую подключен к ATMega2560?
а то спалил бы все к чертям.
Ничего бы не спалил, просто датчик тока бы не работал
А как прозвонить?
Ловкость рук, отпайка барометра…
Он напрямую подключен к ATMega2560?
Схема тут apmcopter.ru/downloads
Облетал квадр с клоном Пиксхаук от ХК. Моторы 2216 800кв, пропы 11х4.5 , аккум 5000 25С, рег Qbrain 4х25А. Прошивка 3.2.rc5. Полет 16 минут, моторы и регули холодные. Съемку не вел, пока не отладил стабилизацию подвеса. Полет в стабмоде. Держит горизонт отлично. Приемик подключен через s.bus.
Почему то переворачивает фото на 180 град при попытке загрузить.
Хочется опробовать acro режим, но имеются опасения что зарулюсь в чисто ручном управлении. Допустимо ли переключение из акро в стабилайз при движении коптера, и насколько быстро он после этого встанет в горизонт?
А почему ФС должен на Land срабатывать.? (в принципе по алгоритму похоже на посадку)
Попробуйте отключить Gps failsafe, мне помогло, была такая же проблема. Без 3D Fix включался Land, запускались движки, потом дизарм. Переключение режимов туда сюда, позволяет снова заармить.

Почему то переворачивает фото на 180 град при попытке загрузить.
У меня для манипуляций Пикаса есть. В форуме переворачивает, когда ставить пытаюсь. Зато заранее перевернутые так и оставляет. Кроксворд, как говорил Райкин.
Ешкин кот и вправду в этом была причина!! Только не пойму почему раньше на этом не попадался.? Вам и всем откликнувшимся огромное спасибо. Аж настроение поднялось!
Словил тут странный глюк в режиме RTL коптер вернулся на точку взлёта завис отвисел положенное время и стал спускаться буквально через пару секунд спуска его стало очень сильно болтать по ролу при этом по питчу оставался в горизонте, во избежание кувырка сразу перещёлкнул на стабилизацию, как только включилась стабилизация коптер завис в горизонте. что это могло быть ? ещё раз попробовать не успел стало смеркаться
рама у меня с продольной развесовкой и пиды по питчу больше чем по ролу в стабилизации летает отлично
Ешкин кот и вправду в этом была причина!
Но не забывайте, что у вас проблема с GPS остается. Вместо Land будет делать что-то неконтролируемое.
как только включиласьстабилизация коптер завис в горизонте. что это могло быть ?
при автопосадке используются жпс данные,
бывает редкий случай когда жпс координата начинает резко скакть метров на 200 туда-сюда либо с севера на юг либо с запада на восток - точно не помню несколько раз в секунду, замечал такое на юблоксах в комнатных тестах, по идее если так себя вел жпс - поведение объяснимо
было 9 спутников судя по OSD, и в этом месте на этой высоте лоитер работал идеально, при этом коптер не пытался лететь, а пытался именно перевернуться по ролу как при быстром спуске и очень низких пидах
Всем доброго времени суток!
Если не затруднит подскажите:
вверху платы есть коннекторы, в документации названные А0-А11. Могу ли я программно назначить на них крутилку/ переключатель?
Программированием пульта или через МП
Скорее всего это будет касаться А4-А7 ( некие непонятные “motor LED”). Остальные -более или менее понятны.
P.S. Затеял тут повесить этот контроллер на DJI550. Пока не понятно, что из этого выйдет. Если есть какие либо сильно подводные камни - если подскажите, буду благодарен. Всем спасибо.
А10 и А11 можно назначить на крутилки чезез МП. Они для управления сервами подвеса. Если в МП во вкладке управлением подвесом питч и ролл назначить А10 и А11 а в выпадающих меню назначить на них каналы передатчика, на которых сидят крутилки, то будет вам искомое! Только оставьте пустыми чекбоксы стабилизации. А то вместе с крутилками будут управляться наклонами квадра.