такие диоды можно найти на материнках в блоках питания и много где ещё вообще подойдёт любой, но можно забить на этот диод и питать как многие просто через INPUT колодку 5 ю вольтами
А как вы запитывайте OSD? Просто данная OSD очень чувствительна к пульсациям по шине питания и может сбоить при питании от некачественного импульсного UBEC или ESC.
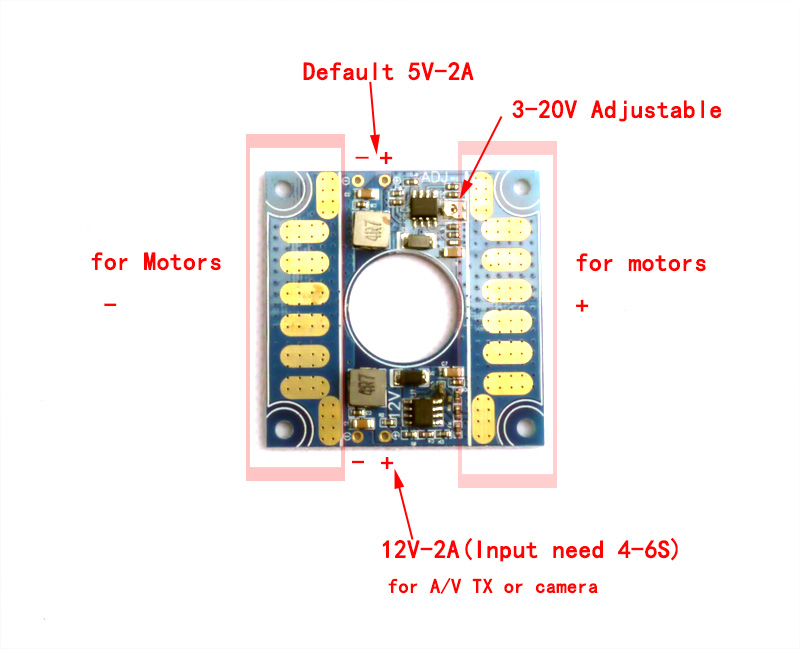
Правая часть запитана от порта L2C которая в свою очередь запитана от 5V UBEC. 5V подаётся на выходы APM. На A4 висит конденсатор.
левая 12V UBEC напрямую
на предыдущей раме,при включении альтхолда,квадр ракетой устремлялся в небо,еле успевал перехватить,собрал на новой раме,боюсь альтхолд проверять в полете,попробовал крепко удерживая в руках чуть повисеть в стабилайз а потом переключил на альтхолд,моторы включились на полную,значит проблема с альхолдом осаталась или так не коректно проверять режим удержания высоты?газ висения настроен,вибрации в пределах нормы.
рама на режим альтхолда никак не влияет, высоту апм нормально показывает? если опускать поднимать в предлах 2-х метров показания меняются плавно и адекватно ?
Почему же, конструкция рамы и способ установки контроллера вполне могут повлиять на стабильность альтхолда при маневрах. Но таких глюков точно быть не должно. Можно зависнуть в метре над землей и включить альтхолд на пару секунд. За это время коптер сильно далеко не улетит, а падение с метра к серьезному крашу не приведет. А потом уже посмотреть лог, и оценить показания бародатчика и газ моторов.
Всех приветствую. А что может быть - калибрую калибрую… а контроллер ничего не запоминает… И ни армится потом… , хотя в тесте компас/мотор калибрэйшн - моторы крутятся…?
Ветер был адовый, но АПМ был неприклонен 😃 Не ужели, эти пол-года тр@хов с АПМом, наконец-то, “заработали”. 😃
И лоитер и Альт-холд (не смотря на ветер) и РТХ прекрасно работают 😃
Тьфу-Тьфу-Тьфу 😃
калибрую калибрую…
Что именно?
Что именно?
Все как обычно. Сначала кручу-верчу, потом ставлю как прога просит… на левый бок, на правый, на нос… и т.д., потом передатчик калибрую… Вроде все ок…, но не сохраняет настройки…
Подключил квадрик к компу по юсб,и начал следить за показаниями altitude в мишке,как только начинают раскручиваться пропы высота падает от -1,5 и до -3 при висении,я так понял он из за этого пытается улететь в альтхолде?хотя не пойму почему так,мозги в корпусе от валькеры 350про плюс свой корпус плюс накрыт поролоном плюс щели в корпусе также закрыты поролоном,кстати в этой же конфигурации на предыдуще раме летал нормально до последнего краша,может быть что барометр травмировало?как эго проверить?