А давайте обсудим Arducopter - APM

EEprom не чистил. А для чего? Там всё инициализироваться должно само. Если конечно софт не кривой.
Надо.
Чтоб глюков не было.
Не должно.
Не кривой.
Хрена себе! Данные не должны инициализироваться но при этом читаются!? Я не спец по ардуино но есть же определённые правила!
Данные не должны инициализироваться но при этом читаются!? Я не спец по ардуино но есть же определённые правила!
Да, EEPROM при перепрошивке не затрагивается. (если принудительно ее почистить, то при последующей прошивке (или перезагрузке) в нее записываются дефолтные для данной прошивки значения)
Какие-такие правила?
инициализации переменных и констант.
Вопрос.
Сейчас летаю на 3.2RC12
Рэнди вчера написал, что скоро 3.2 финал. diydrones.com/…/arducopter-3-2-ready-for-wider-use
Вопрос насчет очистки EEPROMA, без терминала, волшебная кнопка в списке параметров его чистит?
А что за кнопка ?Дефаулт?
скоро 3.2 финал.
Вроде уже вышла. 7 ноября.
волшебная кнопка в списке параметров его чистит?
Да.
Коллеги, имеется вот такой модуль GPS с бангуда
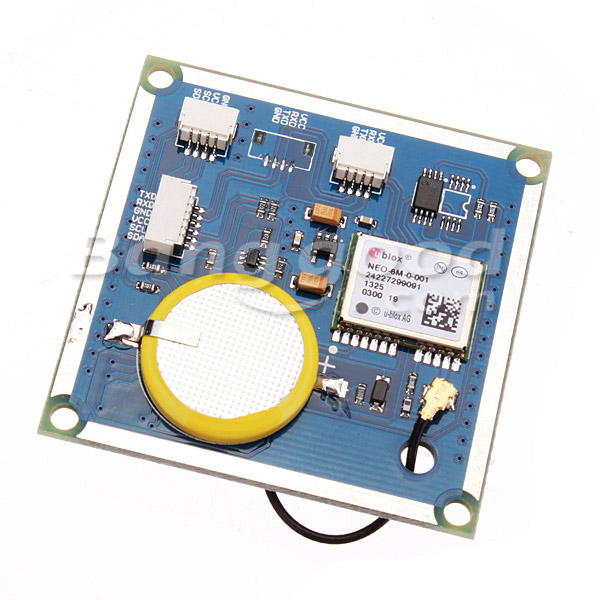
В u-center подключается к нему на скорости 9600, заливаю настройки для АПМ, заливается, и скорость автоматом переключается на 38400, спутники видятся, 3дфикс даже в помещении ловит, HDOP 1.2.
Но стоит мне отключить от USB, и подключить обратно - скорость опять сбрасывается на 9600, на 38400 подключиться не может. Протокол выдает NMEA вместо UBLX. Т.е. как-будто настройки не сохраняются.
В Receiver-Action-Save Config нажимал, но эффекта не дало.
В диспетчере устройств, скорость порта выбираю 38400.
А АПМ тут причем?
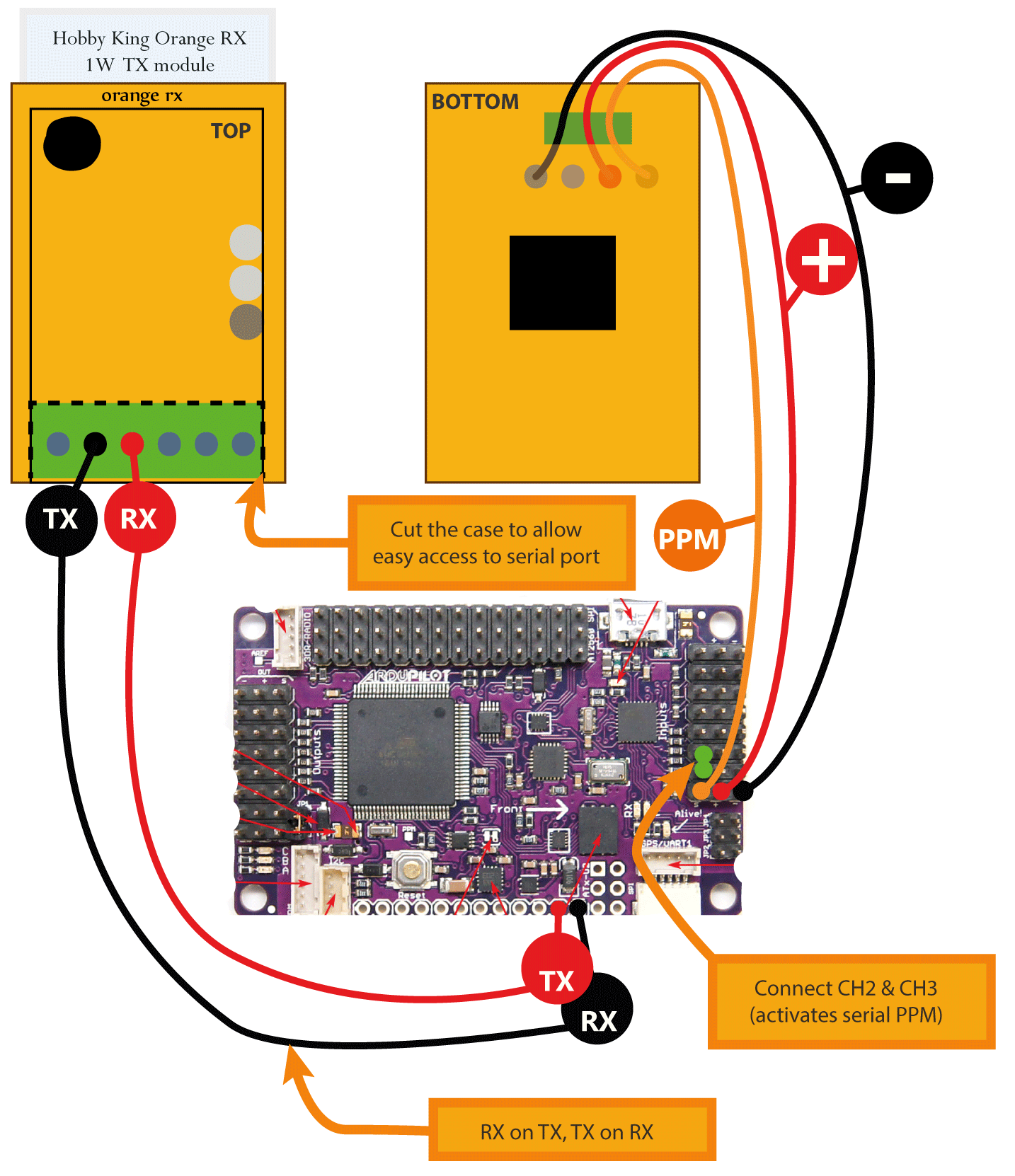
приёмник FrSky D4R подключенный к АРМ по шине РРМ. Также в приёмнике есть свободный RSSI. Как правильно завести RSSI на плату
Обычно это делается вот так. Подсказка номер раз - на страничке по ссылке R-C фильтр сделан не просто так. Подсказка номер два - у вас RSSI выход на 3,3 вольта, а в прошивке Ардукоптер рассчитано на вольтаж 5 вольт и не задать (в отличие от АрдуПлэйна). Подсказка номер три - в настройке ОСД (если вы его используете) можно покрутить процентики (значение 255 - это 100%).
А если вы хотите
Или чтобы на аппе Турнига выводились данные с АРМ.
тогда вам надо 1. шить аппаратуру прошивкой с буковками FRSKy и 2. делать аппаратный мод аппаратуре. 3. Приемник на коптере должен быть телеметрийным (FrSky D4R-II телеметрийный)
Коллеги, имеется вот такой модуль GPS с бангуда
Вам с этим вопросом лучше СЮДА.
Обычно это делается вот так. Подсказка номер раз - на страничке по ссылке R-C фильтр сделан не просто так. Подсказка номер два - у вас RSSI выход на 3,3 вольта, а в прошивке Ардукоптер рассчитано на вольтаж 5 вольт и не задать (в отличие от АрдуПлэйна). Подсказка номер три - в настройке ОСД (если вы его используете) можно покрутить процентики (значение 255 - это 100%).
СЮДА.
Тимур, ведь есть параметр RSSI_RANGE, там можно менять напряжение.
Я отлично помню, что делал так для D8R-plus II который так же 3,3
Тимур, ведь есть параметр RSSI_RANGE
Ага, но только в самолетной прошивке. Или в древних коптерных. Например в 3.1.5 - не было этого параметра… Поэтому я настраивал в самом ОСД.
Насчёт фильтра понятно, Турнига прошита и модифицирована по самые уши (кроме голосового модуля) благо с паяльником дружу, какой порт выбирать в АРМ в прошивке 3.1.5.
Ага, но только в самолетной прошивке. Или в древних коптерных. Например в 3.1.5 - не было этого параметра… Поэтому я настраивал в самом ОСД.
Тимур, вы ошибаетесь!
Специально сходил за коптером в машину.
Подключил Мишу и вот скрин:
Прошивка 3,2Rc12

UPD: Что-то скрин не кликабельный. Вот хайрез prntscr.com/54btac
Прошивка 3,2Rc12
Простите, беты не ставлю. Поэтому и не видел. Хорошо, что они наконец-то вернули это назад. Для мегапирата видел несколько строчек в коде, которые нужно поставить, чтобы этот параметр появился.
Да действительно в 3.1.5 этого параметра нет. Так какой порт лучше выбрать, OSD пока нет, разряд контролирую самой аппой.
всем привет,
ни как не могу найти какие журналы входят в “default” и какие в “NearlyAll”
может кто подскажет…
Так какой порт лучше выбрать
Поставьте какой-нибудь, только укажите его в RSSI_Pin. Нулевой - брать не рекомендуется (обычно батарея меряется).
У меня стоит на А2. Только это не порт, а аналоговый пин микроконтроллера. Порты - это UART с 0 по 2.
Спасибо это я и имел ввиду. Про порт я не правильно выразился, про 0 пин не знал, буду втыкать на 1.
Cнять винты и отключить проверку GPS. Не забыть включить после тестов.
Снял, проверил. Все было ок. Поставил винты и стало видно, что один винт стартует позже остальных. Также он крутит медленнее остальных из-за чего коптер заваливается не смотря на то, что был режим Stabilise. Есть какая-либо возможность проверить скорость вращения винтов при одинаковом газе?
Может пропустил, за всеми темами не уследишь … было?
Уупс было … обсуждается OrangeRx Open LRS 433MHz TX Module