А давайте обсудим Arducopter - APM

инициализации переменных и констант.
Вопрос.
Сейчас летаю на 3.2RC12
Рэнди вчера написал, что скоро 3.2 финал. diydrones.com/…/arducopter-3-2-ready-for-wider-use
Вопрос насчет очистки EEPROMA, без терминала, волшебная кнопка в списке параметров его чистит?
А что за кнопка ?Дефаулт?
скоро 3.2 финал.
Вроде уже вышла. 7 ноября.
волшебная кнопка в списке параметров его чистит?
Да.
Коллеги, имеется вот такой модуль GPS с бангуда
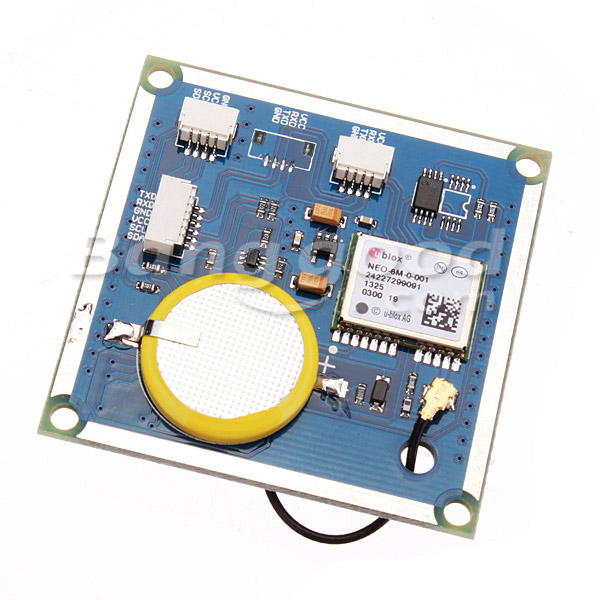
В u-center подключается к нему на скорости 9600, заливаю настройки для АПМ, заливается, и скорость автоматом переключается на 38400, спутники видятся, 3дфикс даже в помещении ловит, HDOP 1.2.
Но стоит мне отключить от USB, и подключить обратно - скорость опять сбрасывается на 9600, на 38400 подключиться не может. Протокол выдает NMEA вместо UBLX. Т.е. как-будто настройки не сохраняются.
В Receiver-Action-Save Config нажимал, но эффекта не дало.
В диспетчере устройств, скорость порта выбираю 38400.
А АПМ тут причем?
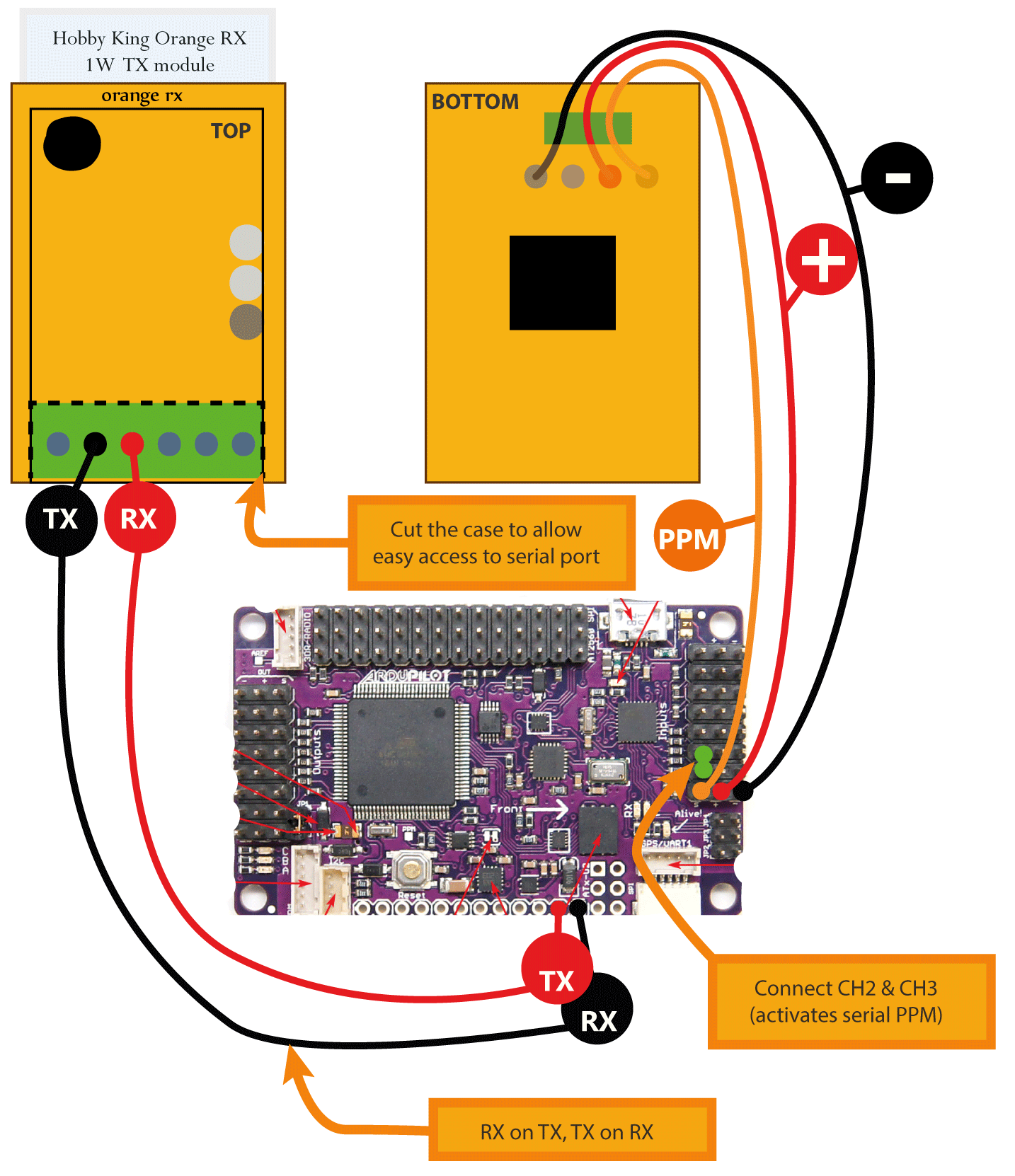
приёмник FrSky D4R подключенный к АРМ по шине РРМ. Также в приёмнике есть свободный RSSI. Как правильно завести RSSI на плату
Обычно это делается вот так. Подсказка номер раз - на страничке по ссылке R-C фильтр сделан не просто так. Подсказка номер два - у вас RSSI выход на 3,3 вольта, а в прошивке Ардукоптер рассчитано на вольтаж 5 вольт и не задать (в отличие от АрдуПлэйна). Подсказка номер три - в настройке ОСД (если вы его используете) можно покрутить процентики (значение 255 - это 100%).
А если вы хотите
Или чтобы на аппе Турнига выводились данные с АРМ.
тогда вам надо 1. шить аппаратуру прошивкой с буковками FRSKy и 2. делать аппаратный мод аппаратуре. 3. Приемник на коптере должен быть телеметрийным (FrSky D4R-II телеметрийный)
Коллеги, имеется вот такой модуль GPS с бангуда
Вам с этим вопросом лучше СЮДА.
Обычно это делается вот так. Подсказка номер раз - на страничке по ссылке R-C фильтр сделан не просто так. Подсказка номер два - у вас RSSI выход на 3,3 вольта, а в прошивке Ардукоптер рассчитано на вольтаж 5 вольт и не задать (в отличие от АрдуПлэйна). Подсказка номер три - в настройке ОСД (если вы его используете) можно покрутить процентики (значение 255 - это 100%).
СЮДА.
Тимур, ведь есть параметр RSSI_RANGE, там можно менять напряжение.
Я отлично помню, что делал так для D8R-plus II который так же 3,3
Тимур, ведь есть параметр RSSI_RANGE
Ага, но только в самолетной прошивке. Или в древних коптерных. Например в 3.1.5 - не было этого параметра… Поэтому я настраивал в самом ОСД.
Насчёт фильтра понятно, Турнига прошита и модифицирована по самые уши (кроме голосового модуля) благо с паяльником дружу, какой порт выбирать в АРМ в прошивке 3.1.5.
Ага, но только в самолетной прошивке. Или в древних коптерных. Например в 3.1.5 - не было этого параметра… Поэтому я настраивал в самом ОСД.
Тимур, вы ошибаетесь!
Специально сходил за коптером в машину.
Подключил Мишу и вот скрин:
Прошивка 3,2Rc12

UPD: Что-то скрин не кликабельный. Вот хайрез prntscr.com/54btac
Прошивка 3,2Rc12
Простите, беты не ставлю. Поэтому и не видел. Хорошо, что они наконец-то вернули это назад. Для мегапирата видел несколько строчек в коде, которые нужно поставить, чтобы этот параметр появился.
Да действительно в 3.1.5 этого параметра нет. Так какой порт лучше выбрать, OSD пока нет, разряд контролирую самой аппой.
всем привет,
ни как не могу найти какие журналы входят в “default” и какие в “NearlyAll”
может кто подскажет…
Так какой порт лучше выбрать
Поставьте какой-нибудь, только укажите его в RSSI_Pin. Нулевой - брать не рекомендуется (обычно батарея меряется).
У меня стоит на А2. Только это не порт, а аналоговый пин микроконтроллера. Порты - это UART с 0 по 2.
Спасибо это я и имел ввиду. Про порт я не правильно выразился, про 0 пин не знал, буду втыкать на 1.
Cнять винты и отключить проверку GPS. Не забыть включить после тестов.
Снял, проверил. Все было ок. Поставил винты и стало видно, что один винт стартует позже остальных. Также он крутит медленнее остальных из-за чего коптер заваливается не смотря на то, что был режим Stabilise. Есть какая-либо возможность проверить скорость вращения винтов при одинаковом газе?
Может пропустил, за всеми темами не уследишь … было?
Уупс было … обсуждается OrangeRx Open LRS 433MHz TX Module
Господа, в продолжение к этой проблеме: rcopen.com/forum/f123/topic233564/14658
В кратце, после перехода на новую раму (с квадро на хекс) коптер начен очень нестабильно себя вести, особенно при вращение… Я выкладывал логи, но ничего интересного там не было, но большинство сошлось на том, что скорее всего я как-то не так сбросил настройки после перепрошивки…
Сегодня после сброса настроек и полной перекалибровке всего что можно и нельзя я провел очередной тестовый полет при котором коптер стал себя вести еще хуже, чем до сброса. Сразу после полета я обратил внимание на то, что CW моторы нагреваются значительно сильнее CCW моторов. Решил добавить в лог информацию о выходах на моторы и выяснилось, что на CW моторы подается значительно большая нагрузка, чем на CCW. Вот как выглядят выходы 1 и 2:

На графике видно, что контролер пытался компенсировать вращение, за счет увеличения оборотов на CW моторы, но чем может быть вызвано это вращение?
У меня x6 конфигурация, моторы подключены правильно, пропеллеры отбалансированы, все необходимые юстировки сделаны (включая compassmot).
Вот лог с расширенной информацией:
dl.dropboxusercontent.com/…/2014-11-08 13-47-28.bi…
Может кто сталкивался с подобным?
Спасибо!
Вот выходные значения всех 6 каналов в одном графике:

Здесь отлично видно, как до взлета значения всех 6 каналов были приблизительно одинаковыми, а сразу после отрыва от земли 1, 3 и 6 каналы полуали бОльшую нагрузку, нежели каналы 2, 4 и 5.
1, 3 и 6 каналы полуали бОльшую нагрузку, нежели каналы 2, 4 и 5.
Реальные обороты под нагрузкой измерьте.