А давайте обсудим Arducopter - APM

RX к RX ни к чему плохому не приведет.
Да, аналоговым сложно нужное увидеть. По-хорошему надо цифровой, с записью. Аналоговым можно проверить, что форма сигнала правильная (почти прямоугольная), со временем не съезжает и помех нет, и что остается такой когда OSD перестает показывать.
Да, спасибо, завтра проверю.
а прозвонить от каких ног атмеги заведены порты у сх-20?
схема апм доступна - с тем чтобы понять на какие ноги заведено у апм
Ну да, это нужно было в первую очередь сделать.
Прозвоню при первой же разборке коптера.
Это нормально.
Я бы поспорил.
Это прямое указание на то, что углы крена/тангажа превышают предельно допустимые для данного коптера.
При 100% газа и максимальном крене/тангаже в stabilize коптер должен лететь или горизонтально или, что лучше, с небольшим набором высоты, иначе летать вообще не безопасно.
- В полете в стабилайз или альтхолд “полный вперед” идет падение высоты.
Уменьшайте параметр ANGLE_MAX. Мой коптер (350ка, моторы 2212, акк 3S, вес 1250) летит без потери высоты при углах 40-45 град (ANGLE_MAX 4000 - 4500).
при висении в лоитер при порывах ветра или при кручении вокруг оси, начинает теряться, болтаться, не держать позицию.
Имхо, потеря позиции при вращении вокруг своей оси указывает на слишком медленный компас.
Подскажите, хочу скачать логи, подключаюсь через терминал (делаю все так же, как когда-то в самом начале после прошивки подключался к терминалу, чтобы сбросить ЕЕПРОМ). Жму энтер, появляется сначала приглашение терминала с версией прошивки, а потом бегут кракозябры. И бегут, и бегут, и никак их не остановить. Что с этим делать, как их остановить этот нескончаемый поток чтобы ввести команду?
Подскажите кто нибудь подключал такой датчик (от F-TEK 31AP) к Arducopter. АРМ 2.6
Если да то поделитесь куда какой провод цеплять.


клон сделали, а ссылку на мануал было влом указать…

схема подключения

hobby.msdatabase.ru/…/apm25-current-sensor
Жму энтер, появляется сначала приглашение терминала с версией прошивки, а потом бегут кракозябры. И бегут, и бегут, и никак их не остановить. Что с этим делать, как их остановить этот нескончаемый поток чтобы ввести команду?
в свежих прошивках нету терминала на апм
логи качают через мавлинк, вкладка рядом с проигрывателем логов телеметрии
Спасибо за ссылки.
Выставил диапазон 0.080 - 0.200 проблема не решилась тоже самое или максимальное 0.200 значение выставляется или минимальное 0.080 пробовал на двух комах, и на обоих тоже самое, версия МР 1.3.30
В версиях 1.3.29 и выше начались косяки.
Парни gps вроди отладил, есть такая проблема. я думаю что то в настройках. короче квадрокоптер весит но дует ветерок и коптер начинает в низ спускаться. потом опять становится на свое положение… барометр закрыт паралоном черным. все впорядке, продул его… решил я зависнуть перед собой и попробовал рукой его вниз он опустился очень легко и поднялся опять на свою позицию… он вяло держит высоту чуть вниз потяниш и ве. обычно он не должен давать этого сделать… может надо где то поднастроить? в пидах или где. скажите куда лезть в настройки… кто знает, я буду очень благодарен
клон сделали, а ссылку на мануал было влом указать…
Какой клон? Чего? Вашего датчика?
Я понимаю, хорошая возможность запиарить свои товары, но это сенсор из комплекта фишки F-TEK 31AP. Там все мануалы есть. Но не факт, что он по цветам совместим с вашим.

Ребят, у кого есть конфиг ublox N8M для АПМ? Можете поделиться? 😃 Буду очень признателен 😃
Я в свой N8M залил конфиг, который выдожен у 3DR на сайте, для настройки гпс с модулями ublox. Гпс спутники видит, но апм не видит сам гпс 😦
5ГЦ, 38400, бинарный протокол UBX.
Старенький N6M прекрасно работает с апм. И скорость у него, почему-то, 9600…
Какой клон? Чего? Вашего датчика?
я сделал прототип в 2012 году, сделал возможность его поддержки в коде ардукоптера
в конце года опубликовал запись в дневнике
rcopen.com/blogs/99365/15541
потом еще год воевал с рэнди чтобы добавил фичу в официальный код ардукоптера.
на алегро сенсор нарвался случайно когда мне принесли в починку контроллер от ветрянной электростанции.
потом узнал что сенсоры алегро уже использует висаста, но у него использовались в мелких 8 ногих корпусах.
то что повторили в других контроллрах - замечательно, ничего против взаимствования хороших решений не имею.
зы про фишку ничего не знаю ни с какого года она вообще и когда у них появился этот сенсор тока
я сделал прототип в 2012 году, сделал возможность его поддержки в коде ардукоптера
то что повторили в других контроллрах - замечательно
Алексей, правильней сказать, что с датчиком тока почему то тормознули создатели АРМ. 😃
У других подобные датчики использовались сразу.
У Папараци, когда еще летали на пирометрах.
У фишек в 2010 точно были.
Парни, вы поможете мне с удержанием высоты? что нужно покрутить чтоб коптер жестче держал высоту, во время удержание высоты я его тяну вниз а он почти и не сопротевляется… вообще он должен недаватся… очень вяло держит высоту чуть ветерок сразу вниз опускается…
Парни, вы поможете мне с удержанием высоты? что нужно покрутить чтоб коптер жестче держал высоту, во время удержание высоты я его тяну вниз а он почти и не сопротевляется… вообще он должен недаватся… очень вяло держит высоту чуть ветерок сразу вниз опускается.
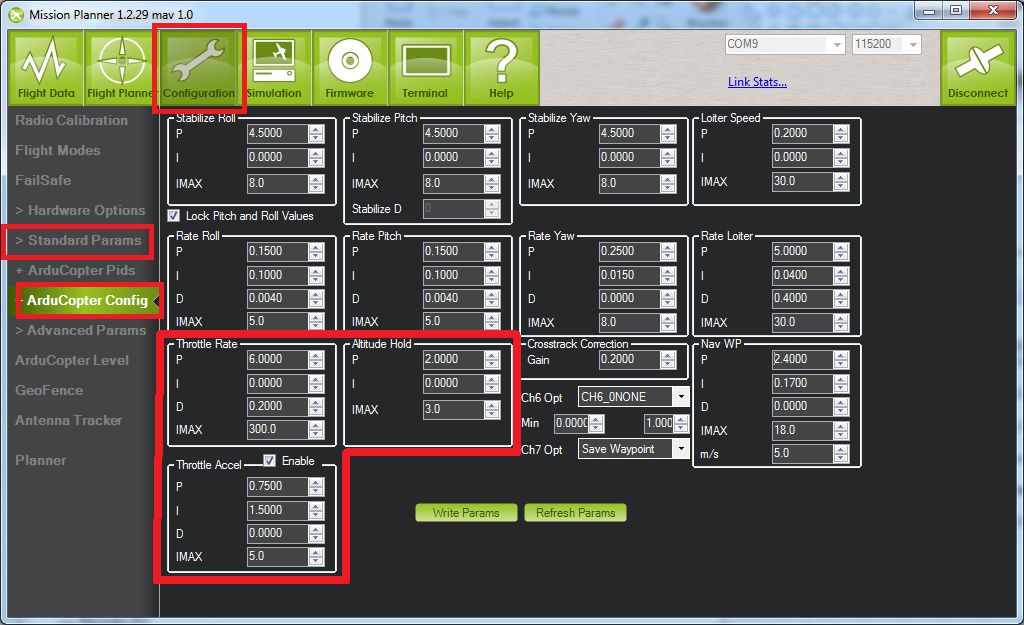
все это по своему отвечает за дозирование газа для контроля высоты.
например у традиционных вертолей throttle rate p надо уменьшать с 6 до 1 чтобы он не выстреливал пулей.
а если аппаратик вяловат - то увеличивать
зы картинка старая, сейчас немного подругому туда попадать и другие дефаулт значения, но суть одна и таже
свежак так

что и как там надо подкрутить и на сколько?
а зачем понижали дефолтную реакцию по акселю с 0,75 до 0.5 ?
и уровень дозировки газа с 6 до 5?
верните дефолтные по второй картинке в моем посте выше и будет как у всех
а зачем понижали дефолтную реакцию по акселю
Дело в том что все эти параметры стояли по умолчанию…
добавите тротл ассел Р до 0.75 будет оказывать сильнее сопростивление именно когда он ощущает ускорение.
тоесть дергаешь рукой когда или подкидываешь.
но если сильны вибрации по оси z то увеличение чревато бросками по высоте без видимых причин
добавите тротл ассел Р до 0.75 будет оказывать сильнее сопростивление
хорошо, я попробую поднять. что еще можно поднять? и еще вопрос, можно ли увеличить скорость подъема как то?
можно ли увеличить скорость подъема как то?
speedUp - указано в сантиметрах в секунду.
speedUp - указано в сантиметрах в секунду.
Хорошо, спасибо, я попробую все это покрутить завтра, да и проверю. если что отпишусь о результате
Скажите, все ставят gps на стойку?
Я просто в свое время хотел ее для двух вещей.:
* Убрать компас подальше от других электронных компонентов.
* Для красоты
После того, как однажды бокс с жпс в полете отвалился и попал под винт… я поставил модуль на раму (рама а-ля дискавери) и внешний компас прям сверху на бокс apm поставил. После этого ухудшений не заметил…спутники ловит так-же. а компас стал точнее работать.
Вопрос в следующкм… планирую раму перебрать и все элементы спрятать внутрь рамы…в том числе и gps…был ли у гого опыт похожий? повлияет ли на прием gps?
модуль neo 6m
При 100% газа и максимальном крене/тангаже в stabilize коптер должен лететь или горизонтально или, что лучше, с небольшим набором высоты, иначе летать вообще не безопасно.
Я не про мощность коптера, а про то, как влияют воздушные потоки на барометр. В stable барометр не влияет на коптер.
в том числе и gps
Ну если рама радиопрозрачна для частоты gps, почему нет? Тоже стоит компас прямо в корпусе apm 2.6, на втором впаял чип прямо на плату, все работает отлично, главное компас\мотор калибровку сделать и наверное лучше с винтами (только очень осторожно) т.к. без них ток слабый в проводке.