А давайте обсудим Arducopter - APM

Всем привет. где то уже выкладывали такое поведение коптера,но решения не нашлось на сколько я помню? может у кого то было такое, и как решили проблему? вроде нормально летает и висит-правда без ветра,но вот при развороте!..
Всем привет. где то уже выкладывали такое поведение коптера,но решения не нашлось на сколько я помню? может у кого то было такое, и как решили проблему? вроде нормально летает и висит-правда без ветра,но вот при развороте!..
У меня иногда ещё сильнее болтается,может,это из-за 3s (Проблемы из-за моли решил)
Видимо,эпидемия какая-то
большой P по рэйту яв
для такого соотношения длины лучей и размеров пропеллеров
У меня иногда ещё сильнее болтается,может,это из-за 3s (Проблемы из-за моли решил)
Видимо,эпидемия какая-то
Летаю на 4s.так что не то!..
большой P по рэйту яв
для такого соотношения длины лучей и размеров пропеллеров
А сколько посоветуете поставить? По яву не трогал.
А сколько посоветуете поставить? По яву не трогал.
уменьшайте до тех пор пока не уйдет эффект но яв еще будет достаточно четко управляемым
уменьшайте до тех пор пока не уйдет эффект но яв еще будет достаточно четко управляемым
Вы имеете в виду стабилайз яв? Который 4.500?
я имел ввиду рэйт, но в даннм случае в принципе можно и стабилайз немного открутить
я имел ввиду рэйт, но в даннм случае в принципе можно и стабилайз немного открутить
Так рейт и так стоит 0.200_0.020???
Калибрую по инструкции, с наклонами вверх-вних все хорошо, а вот право-влево наоборот отображает во флайт дате, хотя калибрую по инструкции - сначала ставлю на левый бок, потом на правый. Где тут подвох?
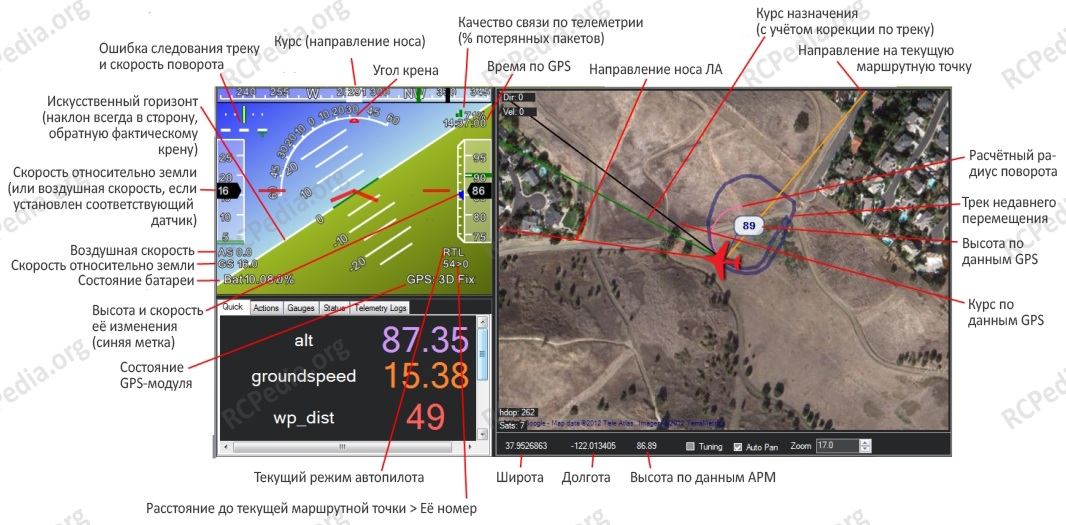
И еще. GPS без стрелки на корпусе. Можно ли как-то по отображению на карте проверить работу компаса? Вот что означают все эти цветные линии?
Летаю на 4s.так что не то!..
Я про то,что мой колбасит сильнее из-за того,что я летаю на 3s,наверное
Можно настроить на тумблер резкое отключение моторов?
У меня он как-то плавноупал в кусты и свернул луч мотором
Может,и бред,но излом был такой,будто квадр упал на моторы сверху
Но он не падал и не вверх ногами
Калибрую по инструкции, с наклонами вверх-вних все хорошо, а вот право-влево наоборот отображает во флайт дате,
Вы наклоняете квадрокоптер вправо, а земля, соответственно, наклоняется, гтносительно него, в лево. Так и должно быть. Щелкните по HUD-дисплею правой кнопкой, выберите Russian Mode (или как-то так), и посмотрите в этом режиме.
Стрелка компаса, не помню цвет, главное — не черная. Они обе показывают в одну сторону, по идее.
Уточнил. Красная Current Heading — это показание компаса.
Стрелка компаса, не помню цвет, главное — не черная. Они обе показывают в одну сторону, по идее.
Самая важная - красная - фактическое направление,насколько я понял
Да, я сразу дописал об этом 😃
Да, я сразу дописал об этом
Не обновлял страницу))
Коллеги, а кто нибудь взлетал с лодки или катера? По идее перед армингом калибруются гироскопы… а лодка или катер будет слегка качаться…
Уже обсуждалось на высшем уровне. Даже с ледокола заармиться не всегда получается.
Я читал об этом.
По крайней мере, так было раньше. Сейчас я пробовал, с небольшим качением гироскоп калибруется, просто не очень точно. Соответственно, потом немного врет.
Кстати! После калибровки, можно вручную подправить калибровку гироскопа (оффсет) через Mission Planner. 😃 Я тоже пробовал. ) Летать только не пробовал с ручными коррекциями. ))
вот тут обсуждают boat start
diydrones.com/…/how-to-launch-arducopter-iris-or-s…
В первый раз когда тестировал коптер на Arducopter, то аппаратуре наоборот работало вправо-влево. Теперь вот заново откалибровал аксель и теперь вперед-назад перепутаны местами. Я, конечно, могу решить проблему настройков реверса на аппе, но хотелось бы понимать откуда вообще эта фигня берется?
У меня почему-то перестал нормально работать компас - compass incossistent.
При калибровке выбираю внешний компас, склонение автоматически. После калибровки офсеты для внешнего в пределах нормы, но после еще выдает значения и для второго компаса, которые уже около 250. Так и должно быть или его надо как-то отключить принудительно? Верное направление не показывает, в лоитере либо летает “воронкой”, либо вообще деру может дать в сторону. Правда минут через 10 полета начинает держать позицию, но после смены аккумулятора все заново.
Контроллер Pixhawk 3dr
GPS модуль Ublox neo 6
Прошивка 3.2
Ранее на этом коптере все было путем, после перерыва в полетах около месяца такая ситуация. Прошу подсказать где что подправить.
Предлагаю обсудить один вопрос. Но сначала несколько фактов:
- Юлиан, подключая питание, откусил лишь один плюсовой провод. Второй остался на месте, по сути, оставив питание от PowerModule на месте.
- Защитный диод открывается при разности потенциалов 0,3В. Это если я не ошибаюсь.
А теперь, внимание, тема для обсуждения.
- Мы оставляем Power Module полностью подключенным.
- Мы подводим еще одно питание, от понижайки DC-DC (плюс и минус) на контакты A0 или A1.
Я сделал такие замеры: когда подключен лишь PowerModule, через защитный диод, напряжение на APM проседает до 4,6-4,7 вольта.
Подключив второе питание, напрямую, без диода, я получил напряжение на APM 5.00V
Получается, что пока напряжение питания на APM более 4,7 вольт, PowerModule не участвует в питании контроллера, ибо диод закрыт.
Если же напряжение по какой-то причине упадет ниже 4,7V, PowerModule запитает APM в качестве резервного источника питания, добавив недостающую энергию.
Где я ошибаюсь, И где минусы такого, сдвоенного питания?
Спасибо.
Контроллер Pixhawk 3dr GPS модуль Ublox neo 6 Прошивка 3.2
3.2 сильно старовата для пикса,
на 3.3 пробовал на f4by с заведомо кривым компасом, если немного пролететь а потом перейти в лоитер то воронки нет
вроде бы у 3.2 на пиксе вторым становится внутренний встроенный в пикс компас, возможно рядом с ним вкручен намагниченный шуруп, попробуйте выкрутить и размагнитить