А давайте обсудим Arducopter - APM

Копать, копать… летать хочется.
Арду это не афера
Это практически полноценный автопилот, под управлением которого летают не только любительские и промышленные беспилотники но и даже небольшие но настоящие самолеты,
если вам кто то пообещал что при подходе “ничего не хочу знать, ничего не хочу уметь” у вас все будет работать - плюньте ему в лицо.
Как минимум нужно прочесть, понять и исполнить инструкцию по настройке, купить компоненты не категории “а вот тут на цент дешевле”, пусть не самое лучшее, но хотябы варианты которые попробовали и рекомендуют коллеги.
Копать, копать… летать хочется.
для того чтобы “просто полетать” надо брать готовую модель
-Мелкие модели - асортимент хабсанов с регистратором на борту или даже с фпв
-Cheerson CX-20 дешево и сердито
-фантомы нескольких поколений
арду для тех кто хочет чтобы летало как надо, причем чтобы летало именно как надо тебе лично, а не как это придумал изготовитель
Согласен, понимаю, знал что беру. Просто в конце фразы забыл смайлик поставить, такой 😁
для того чтобы “просто полетать” надо брать готовую модель -Мелкие модели - асортимент хабсанов с регистратором на борту или даже с фпв -Cheerson CX-20 дешево и сердито
… Ветки Ново-Чириков послезавтра вас догонит по объёму - там до полёта по точкам в “готовом” копе только двое с половинкой пилотов за два года долетели… Больше их никто не видел… 😁
Но, видимо, это тоже от желания по-скорее взлететь, а не поучиться (как это не банально звучит).
На машину по пол-года каждый день да потом экзамены, а тут хоть две тысячи, хоть двести за коп - из магазина в небо торопиться не надо - гравитация принимает круглосуточно 😇 😂.
арду для тех кто хочет чтобы летало как надо, причем чтобы летало именно как надо тебе лично
Не получилось у меня второй раз миниапм на 280 настроить с другими винтами. Чтобы хоть как то летало. P уже до 0.04 уменьшил. В удержании высоты вроде нормально. Подёргал его туда сюда на месте 10 секунд, остановил и понесло его по диагонали куда то, выровнял - в другую сторону понесло. На спуске вообще закувыркался и луч сломал =(
Не получилось у меня второй раз миниапм на 280 настроить с другими винтами. Чтобы хоть как то летало. P уже до 0.04 уменьшил. В удержании высоты вроде нормально. Подёргал его туда сюда на месте 10 секунд, остановил и понесло его по диагонали куда то, выровнял - в другую сторону понесло. На спуске вообще закувыркался и луч сломал =(
нормальная ситуация! и вполне ожидаемая!
у мелких рам своя специфика
- нужны регули поддерживающие активное торможение. дампед лайт включить.
- когда включаешь дампед лайт нормальные пиды становятся бешенными. Приходится сильно уменьшать, D из полного списка параметров только, до 0,0001 -0,0002 по ролу.
и хотя в этом примере настройки sites.google.com/site/…/kvadrokopter-250-f4by
использован 32 битный контроллер с прошивкой 3.2 думаю вполне может так случиться что рецепт подойдет и для вашего случая
При определенном везении и расположении звезд может полететь даже из коробки если прочитать инструкцию от Юлиана раза три и законспектировать:) наиболее важные моменты.
Доброго времени, подскажите в такой ситуации: имею коптер ~1500 гр. т-мотор 950+xrotor 20a(blheli) на винтах 11х38 пытался выполнить автотюн(прошу за его использование не ругать, просто решил сначала автотюн, а потом подогнать ручками) в режиме альтхолд, несколько раз были резкие провалы по высоте, может моторам тяжеловато(срыв синхры ?), делал давно автотюн на 10х45 такого не наблюдал но там и рама была другая (f450) сейчас карбон полегче, PID 0.165 0.1 0.003 соответственно. Лог yadi.sk/i/zoIArhKXuogJS
Ребят. Подскажите плиз…
Есть 5000мач 4эс, санискаи двиг, 10*45 проп, афро 30а регули, рама 450ка, АПМ Pro
Хочу летать на этом конфиге так как время полета ~ 20 минут…
Есть проблемка. На свежей зарядке коптер ведет себя странным образом. Он очень нервный какой то… Дерганый… Во всех авторежимах при полете вперед-назад летит как по колдобинам. После 2-3 минут полета становится послушным и менее дерганым. Есть мысль что это из за повышенной напруги.
Я прикреплю лог - просьба гляньте кто может опытным глазом. Меня смущает питание контролера оч как то пляшет а вибрации вообще струной. Быть такого не может вроде…
Ну и кто то может даст совет что еще подкрутить. СПС БИГ!
ПС Сейчас заберу с почты пропы 8*45 на них попробую еще.
пропы 8*45
- не маловаты для рама 450ка ? Каков вес - около 1250гр ?
- не маловаты для рама 450ка ? Каков вес - около 1250гр ?
Вес примерно такой и есть. Точнее вечером смогу узнать.
Пропы вроде для 4 эс норм как альтернатива 10 45 (эхо интернета)
Вот настройки пидов моих. Может кто-то что то да увидит.
Просьба гляньте лог, там есть по питанию вопросы…
СПС!
афро 30а регули
Стоят на лучах или в середине?
А откуда такие ПИДы, после автотюна что-ли?
Стоят на лучах или в середине?
Снизу лучей по середине)
А откуда такие ПИДы, после автотюна что-ли?
Да. Rate Roll P только крутилкой выставил. 0.1 даже много получалось…
"APM:Copter V3.3" - Unsolved issue: loses altitude during fast repositioning
Марко выложил баг с видео. Проваливается высота в althold и pos hold в 3.3
Этот трабл только от прошивки зависит? У меня такая же ситуация в стабе. В althold вообще очень медленно двигается, можно увеличить скорость? Вроде упоминался тут параметр.
Этот трабл только от прошивки зависит? У меня такая же ситуация в стабе
этот трабл не касается режима стабилайз.
Лог слейте с него, посмотрим
Спасибо, добрый человек, но тут такое…
www.youtube.com/watch?v=lAXDnrHXzJ0
Это я что-то делаю не так или таки глюки?
Там же сверху белым по чёрному написано, где искать логи 😌
У меня собран гексакоптер на APM. Благодаря форуму, вашим советам, всё настроено и пока (тфу 3 раза) проблем нет. Но вот всё же по мне так уж слишком шустрый гексакоптер для своего веса. Очень резкий, на подобе мелких квадриков. Как то можно ограничить его резвость, добиться плавности?
Вы хотите ограничить скорость перемещения или скорость наклона коптера? И в каких режимах?
Как то можно ограничить его резвость, добиться плавности?
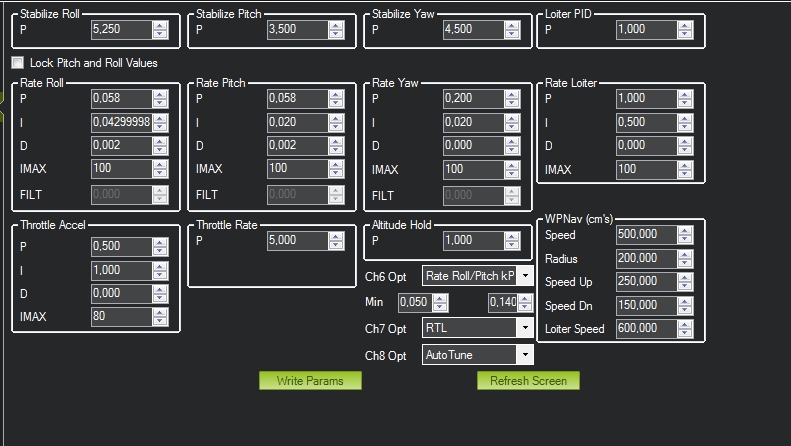
попробуйте уменьшить STAB P по ролу и питчу с типовых 4,5 до 3,5
это верхний параметр на экране пидов