А давайте обсудим Arducopter - APM

Доброго времени, подскажите в такой ситуации: имею коптер ~1500 гр. т-мотор 950+xrotor 20a(blheli) на винтах 11х38 пытался выполнить автотюн(прошу за его использование не ругать, просто решил сначала автотюн, а потом подогнать ручками) в режиме альтхолд, несколько раз были резкие провалы по высоте, может моторам тяжеловато(срыв синхры ?), делал давно автотюн на 10х45 такого не наблюдал но там и рама была другая (f450) сейчас карбон полегче, PID 0.165 0.1 0.003 соответственно. Лог yadi.sk/i/zoIArhKXuogJS
Ребят. Подскажите плиз…
Есть 5000мач 4эс, санискаи двиг, 10*45 проп, афро 30а регули, рама 450ка, АПМ Pro
Хочу летать на этом конфиге так как время полета ~ 20 минут…
Есть проблемка. На свежей зарядке коптер ведет себя странным образом. Он очень нервный какой то… Дерганый… Во всех авторежимах при полете вперед-назад летит как по колдобинам. После 2-3 минут полета становится послушным и менее дерганым. Есть мысль что это из за повышенной напруги.
Я прикреплю лог - просьба гляньте кто может опытным глазом. Меня смущает питание контролера оч как то пляшет а вибрации вообще струной. Быть такого не может вроде…
Ну и кто то может даст совет что еще подкрутить. СПС БИГ!
ПС Сейчас заберу с почты пропы 8*45 на них попробую еще.
пропы 8*45
- не маловаты для рама 450ка ? Каков вес - около 1250гр ?
- не маловаты для рама 450ка ? Каков вес - около 1250гр ?
Вес примерно такой и есть. Точнее вечером смогу узнать.
Пропы вроде для 4 эс норм как альтернатива 10 45 (эхо интернета)
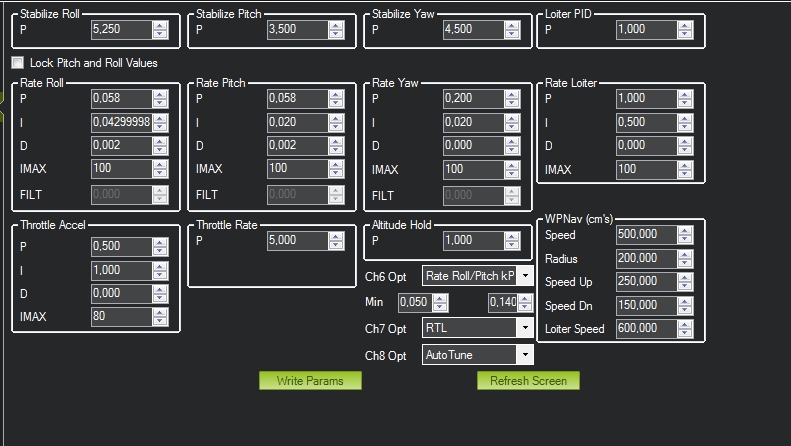
Вот настройки пидов моих. Может кто-то что то да увидит.
Просьба гляньте лог, там есть по питанию вопросы…
СПС!
афро 30а регули
Стоят на лучах или в середине?
А откуда такие ПИДы, после автотюна что-ли?
Стоят на лучах или в середине?
Снизу лучей по середине)
А откуда такие ПИДы, после автотюна что-ли?
Да. Rate Roll P только крутилкой выставил. 0.1 даже много получалось…
"APM:Copter V3.3" - Unsolved issue: loses altitude during fast repositioning
Марко выложил баг с видео. Проваливается высота в althold и pos hold в 3.3
Этот трабл только от прошивки зависит? У меня такая же ситуация в стабе. В althold вообще очень медленно двигается, можно увеличить скорость? Вроде упоминался тут параметр.
Этот трабл только от прошивки зависит? У меня такая же ситуация в стабе
этот трабл не касается режима стабилайз.
Лог слейте с него, посмотрим
Спасибо, добрый человек, но тут такое…
www.youtube.com/watch?v=lAXDnrHXzJ0
Это я что-то делаю не так или таки глюки?
Там же сверху белым по чёрному написано, где искать логи 😌
У меня собран гексакоптер на APM. Благодаря форуму, вашим советам, всё настроено и пока (тфу 3 раза) проблем нет. Но вот всё же по мне так уж слишком шустрый гексакоптер для своего веса. Очень резкий, на подобе мелких квадриков. Как то можно ограничить его резвость, добиться плавности?
Вы хотите ограничить скорость перемещения или скорость наклона коптера? И в каких режимах?
Как то можно ограничить его резвость, добиться плавности?
попробуйте уменьшить STAB P по ролу и питчу с типовых 4,5 до 3,5
это верхний параметр на экране пидов
Если не ошибаюсь нет же параметра по ограничению голбальной высоты ?
Случилось сегодня непонятка, перестал подниматься в лойтере по высоте, упирается в потолок примерно 100м, причем такой же потолок который установлен в гео-сетке. Сам геофенс не включен. В стабилайзе и альтхолде все норм. Провел эксперимент, влючал гео-сетку, улетал за пределы, коптер удачно возвращался по РТЛ., сетку отключаю, по периметру летает без ограничений, по высоте упирается все в тот же потолок, но РТЛ не срабатывает. Мистика.
3.2.1 версия на АПМ.
А если потолок поставить больше или меньше для проверки. То где будет упираться?
А если потолок поставить больше или меньше для проверки. То где будет упираться?
Именно так же подумал. проверил. упирается в потолок установленный в параметре геофенс, не зависимо, активный он или нет. наверное придётся пока установить потолок в максимум возможного до выяснения причины.
Тогда получается косяк 3.2.1. В принципе такое возможно, в смысле 3.2.1 получилась малость сырая и дорабатывать ее было неинтересно из-за 3.3.
Или накладки настроек, если не чистили еепром после обновления.
Тогда получается косяк 3.2.1. В принципе такое возможно, в смысле 3.2.1 получилась малость сырая и дорабатывать ее было неинтересно из-за 3.3.
Или накладки настроек, если не чистили еепром после обновления.
Согласен.Другого обьяснения не вижу. И ведь только хотел похвалить прошивку. Подготовил юбилейный полет по точкам, так, не слетал. Как говорится, мелочь, а осадочек остался. Но зато с другой стороны за все время (29 авто полетов) на этой прошивке небыло срывов по ЖПС.
Друзья, всем привет. Собрал сенсор напряжения по схеме Алексея Козина.
Всё как на схеме для 3s батареи. Я правильно понял, сенсор нужно включать во вторую тройку контактов (отсчёт с 1) от разъёма телеметрии? И какие настройки указать в MP, чтобы увидеть напряжение? Питаю apm от отдельного ubec, подключаю по схеме:
Я правильно понял, сенсор нужно включать во вторую тройку контактов (отсчёт с 1) от разъёма телеметрии?
Да, только называется он А1 (начинается отсчет с А0).
И какие настройки указать в MP, чтобы увидеть напряжение?
Посмотреть можно как делает Юлиан примерно с 10:30
.
Только вместо 3ДР должно быть Other. Можно проверить например в дереве параметров - должно быть указано напряжение к А1.