А давайте обсудим Arducopter - APM

Добрый вечер, может кто подскажет 😃 Собрал коптер китайский на Arducopter 2.6 прошивка V3.2.1, аппаратура радиолинк AT9. Сегодня приехал модуль PRM-02 для передачи телеметрии на пульт. Подключил его к приёмнику и АПМу в разъём телеметрии, но данных на аппаратуре нет 😦 (прошивка 1.2.6) контакты TX RX местами менял, в одном случае светодиод на PRM-02 горит, в другом хаотично мигает, но данные телеметрии на аппаратуре по нулям (питание коптера от АКБ) Вот и теряюсь в догадках АПМ не выдаёт чего-то (обычной телеметрии нет) или модуль PRM-02 бракованный прислали. В миссион планере во вкладке “OSD” пробовал нажимать кнопку включить телеметрию, но при этом ничего не происходит…
Прошу помощи. Сетап: f450, emax 2216, dji 30a opto, 3s 5200, apm 2,6 все по фен-шую. Летал на dji 2212, пропы 10х3.8 все было идеально! Заменил только моторы и пропы, поставил emax 2216 и пропы 12х5.5 (крепления через болтики)! И начались проблемы гуляет по высоте на 3, 4 метра скачет. Что может быть? Грешу на вибрацию, очень сложно пропы ровно закрепить!
Лог и пиды прилагаю. Посмотрите если не сложно. Заранее благодарен.
cloud.mail.ru/public/7cQZ/Kxg1FdC5L лог!
cloud.mail.ru/public/Dnd4/JByqFg7qL пиды!
Всем доброго времени суток.
Кто из тех кто в теме летает с mavlink-frsky телеметрией на пульте T9X T9XR и какой прошивкой пользуетесь? Я мучаю прошивку из темы
rcopen.com/forum/f4/topic364947/304
но у меня пульт не получает HDOP и напряжение батареи. Что бесит. Заставить работать OPENTX через фриску у меня не вышло. Есть дельные советы?
гуляет по высоте на 3, 4 метра скачет. Что может быть? Грешу на вибрацию
Да, вибрации большие.
В остальном вроде проблем нет (судя по тому, что записалось).
Да, вибрации большие.
В остальном вроде проблем нет (судя по тому, что записалось).
Т.е. все таки вибрации влияют на баро? Или ошибаюсь?
Если фильтром поиграть, ПОМОЖЕТ? И как такие пропы правильно выставить, может хитрость какая есть?
air-hobby.ru/…/802-komplekt-karbonovih-vintov-dlya… не реклама.
Т.е. все таки вибрации влияют на баро?
Вполне. А еще на аксели, они ведь тоже участвуют в расчете высоты.
Если фильтром поиграть, ПОМОЖЕТ?
INS_MPU6K_FILTER стоит попробовать поставить 10 и даже 5.
И как такие пропы правильно выставить, может хитрость какая есть?
Основная хитрость заменить пропы на другую фирму. Тарот делает жутко разбалансированные винты. Так и не понял как их балансировать. Пользуюсь другими.
Обычно при установке должно быть центрирующее кольцо.
Потом как уже писал несколько раз.
Закрепляете коптер. И по одному запускаете. Запоминаете уровень вибраций. Наклеиваете изоленту сверху и проверяете. Стало меньше, ищем минимум. Больше - клеим на другую сторону.
INS_MPU6K_FILTER стоит попробовать поставить 10 и даже 5.
маленькие значения фильтров могут способствовать возникновению раскачки на относительно небольших рамах.
именно по этому фильтр по умолчанию достаточно высок
эту проблему решили в прошивках для 32 битных контроллеров начиная с 3.3.2 появились раздельные фильтры на управление стабилизацией и на иму и по акселю на управление высотой
Прошу дать совет - какой контроллер лучше купить Pixhawk 2.4.8 или mini APM pro? Планирую сборку 450-го бюджетного квадрика. Если что, опыт с APM есть - интересует именно контроллер.
лучше купить Pixhawk 2.4.8 или mini APM pro?
Лучше взять F4BY.
Глянуть можно здесь hobby.msdatabase.ru/production_main/product.
На АПМ вряд ли будет уже современная прошивка. Появляется много хорошего и все мимо АПМ.
F4BY Вам даже ждать не надо в Москве. Доехали, забрали. Если что, так же и помощь.
Прошу дать совет - какой контроллер лучше купить Pixhawk 2.4.8 или mini APM pro? Планирую сборку 450-го бюджетного квадрика. Если что, опыт с APM есть - интересует именно контроллер.
Я летаю на про мини, за два года использования не накрылся, приклеен на ленте в два слоя, только провода нужны другие, мне нравится.
Лучше взять F4BY
А чем он лучше Pixhawk? Из описания совершенно не очевидно. Стоит-то дороже даже…
А чем он лучше Pixhawk? Из описания совершенно не очевидно. Стоит-то дороже даже…
В нем нет лишних деталей , которые часто глючат.
Компактнее , но это Вам наверно не интересно. При этом есть все необходимые выводы.
Продается и поддерживается рядом с Вашим домом наверно тоже не интересно.
Для меня это плюс по сравнению с пиксом.
Но некоторым хочется только пикс , потому что нравится и с этим ничего не поделаешь.
А чем он лучше Pixhawk?
Лично для меня, как владельца пиксов очевидны такие недостатки и достоинства(у меня есть и клоны и оригинал)
1)Размер и компоновка пикса с разъемами сверху, (мне лично это не удобно и добавляет проблем при встраивании в раму между центральных пластин например, если необходимо иметь возможность установить подвес и сверху рамы)но сейчас есть варианты с разъемами сбоку(всякие там мини и т.д.), но там свои проблемы…
2)Высокий процент брака при отсутствии обратной связи с продавцом(тобишь глючый сдать назад проблематично, это про клоны естественно), т.о. имхо большинство проблем приписываем “глючному софту, кривому железу и т.д.” ни что иное как проблемы конкретной железки типа всяҡих соплей, непропаев, глючных датчиков и т.д…и выявить это за частүю проблематично, тобишь будешь иногда падать “непонятно почему…”
Плюсы:
1)Родной софт без модификаций позволяющий юзать всякие удобные ништяки типа телеметрии полной в пульт - www.craftandtheoryllc.com (скоро должно в оф. прошивке появиться, там может и в ф4 появиться)
2)Резервное питание контроллера без доп. железа(на ф4 не знаю кстати, можно или резервирование нүжно делать отдельно?)
Резервное питание это больше дело вкуса . Организовать можно и на АПМ, и на ф4 (отдельно ).
По мне важнее 1 хороший, чем 2 ненадежных. Был бы надежный, не вставал бы вопрос про резервный.
Не фонтан. Летать будет как-то, но скорее всего будут проблемы.
Это большие вибрации? тогда что значит маленькие? Всегда считалось допустимые вибрации ±3, а тут ±1.5
Мне бы таких достичь…у меня допустим ±5, и проблем никогда не было.
Был бы надежный, не вставал бы вопрос про резервный.
Модуль от козина достаточно надежный источник питания с вашей точки зрения например? у меня основным стоит он, от назы еще стоит на другом аппарате…
А на счет вкуса, по мне лучше 2 хороших чем 1 хороший, не?
Я летаю много, нарно под час в день если разделить общее время например за последний год, летаю в тропических условиях при высокой влажности и темп. и т.д. и горело у меня уже все что можно, и резервное питание реально спасало аппарат…елиб его небыло были бы дрова, утопцы и т.д…
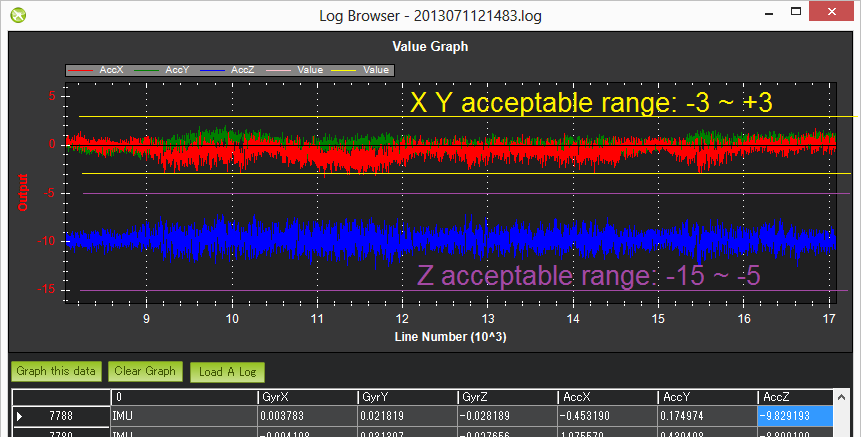
подобный уровень вибраций считается недопустимым.

Уровень вибраций после балансировки пропеллеров и замены демпферов на более мягкие. уровень по осям XY в норме, ось Z - высота недопустимо сильно вибрирует.

Вибрации после совмещения центра упругости с центром масс и утяжеления полетного контроллера 100г грузом

просто наглядный пример уровней вибраций при фильтре 43гц.
если фильтр стоит 20 то показания на вибрирующей раме будут сильно занижены и для достоверной оценки нужно поменять фильтр и совершить тестовый полет для записи логов
подобный уровень вибраций считается недопустимым.
Вай как я отстал от жизни… два года назад когда я строил коптер такая картинка была бы эталонной… я как-то на ней остановился и забыл…
ради интереса на выходных включил логгирование вибраций… посмотрел что они ±5 и ±10 и успокоился… а оказывается все плохо…(правда я готовлюсь к приходу 200 рамы и тренируюсь на 500ке))) там ща нагрузка на нее будь здоров.)
Кстати… я дико отстал от темы, видел тут всякие фильтры …ЕКФ или еще что-то… это как-то влияет на график? Я то по старинке все настраивал…(точнее как год назад последний раз обновился больше в настройки не лазил…так и летаю)
полюбому сильные вибрации вредны, даже если математика современного 32 битного контроллера и как то переварит их, то механически сильные вибрации в любом случае негативны. С вибрациями может происходить механическая модуляция фазы у кварцевых резонаторов, возникать паразитная генерация в керамических конденсаторах, практичиески это выливается в помехи в работе навигационных приемников, видео и радио аппаратуры.
ну и конечно же конструктивные разрушения и ускоренный износ
полюбому сильные вибрации вредны,
с этим спорить глупо, но что считать сильными вибрациями?
Я то опирался на урдупилотовские мануалы… и там говорилось ± 3 это ок…
у них свои взгляды на норму, у меня свои.
при их норме лететь то будет, но не так хорошо как обычно хочет пользователь
- чтобы полет был стабильным и предсказуемый
- чтобы высоту держало с точностью до нескольких см