А давайте обсудим Arducopter - APM

Очень загадочная ситуация у меня вышла.
Была у меня как-то проблема с радио телеметрией 433Mhz, суть которой сводилось к тому, что если включить компьютер и коптер, сунуть USB свисток в комп, то mission planner к коптеру подключался только с первого раза, потом, если отключиться и пытаться подключиться заново, то подключение не происходит, даже если на коптере питание отключать, подключать, перегружать mission planner, все без толку. Наверно, надо было еще комп выключить и дать ему постоять.
Так вот, пересобрал я коптер, грубо говоря, построил новый. Но использовал тот же полетник, и купил я взамен этой телеметрии WiFi телеметрию.
Вчера ее воткнул в полетник, комп увидел новую сетку WiFi, я запустил mission planner и подключился удачно к коптеру (IP адресс, порт и UDP протокол), поигрался двигателями, поглядел настройки, параметры, все чудно работало и достаточно быстро.
После этого опять, отконектил mission planner от коптера… и усо, приплыли, опять не могу подключиться, что только не делал, забыл лишь копм выключать.
Уже даже не знаю, неужели это в компе дело? Что за странное поведение, с чем может быть связано, есть идеи?
ЗЫ по USB всегда хорошо соединяется
ЗЗЫ еще сегодня поэкспериментирую, но даже не знаю куда и копать.
Думаю попробовать заменить сдохшую MPU-6000 (не весть какие прям деньги стоит), но китайцы повсеместно предлагают MPU-6050, якобы как НОВЫЙ полный аналог.
Брать? Судя по инфе о каждой похожи, но межет чего не знаю…
нет, у 6050 нет шины spi а в арду используется именно она
у меня была ошибка, что Failed to boot MPU6000 5 times и не стартует APM,
помимо неисправности мпу6000 может быть
-нет 3,3 вольта или сильно занижено или сильно завышено
-непропай мпу
-непропай или неисправность конвертера уровней через который мпу подключена к атмеге
-непропай ног атмеги или сама атмега.
-неисправность барометра (он сидит на тех же портах что и мпу)
-неисправность высоковольтного конденсатора cpump
опять не могу подключиться
У меня вроде подобное, ставлю свисток вифи в комп, подаю питание на коптер, запускаю мп, пока запускается МП свисток уже соединился с коптером, потом коннектится МП. Отключаю МП от коптера и все, второй раз можно подключиться только если перед новым коннектом разьеденить и снова восстановить соединение между wifi свистком и коптером .
Здравствуйте.
Не пойму в чем дело. Имею APM 2.6 (китайский) и бывает так что, включив, красный светодиод поморгает немного и начинает постоянно гореть, при этом в MP при подключении ошибка. И на арминг с аппаратуры никак не реагирует. В первый раз всё как то само прошло. А во второй только после отключения всего, очистки еепром и прошивке заново.
Уже думаю брать новый апм
так читайте ошибку. Явно что-то не проходит предполетный опрос контроллера
Всем привет. Возник вопрос. После калибровки акселерометра нужно сделать реверс право лево.Т.Е при наклоне в право Мр показывает наклон в лево. Все делал по инструкции. Арм 2.8
Неспешно подбираю для своего мелколета APM для полетов “по кочкам” 😃
Но даже версия Mini APM Pro имеет размеры 60x38 мм, что для моего мелколета будет многовато.
Но сегодня на Ali нажу такой миниатюрный клон: Mini APM MiniAPM V3.1 Mini ArduPilot Mega 2.6 External Compass APM
Его размеры всего 35x35, чтобы было бы в самый раз:
В комплект вроде даже входит датчик тока.
Описание на русском гугловском выглядит так (на английском вообще нет):
наземной станции.
• 8 КАНАЛА вход шим, 8 мощность двигателя.
• 12 способ AUX вход и выход.
• полная возможность подключения, поддержка GPS, дополнительные
компас, телеметрии и блок питания.
• 35 х 35 мм размер платы, 30x30 мм скважины к скважине.
на борту Компас, ограничивается размер,
на борту компас работает нестабильно,
мы удалим на борту компас
без предварительного уведомленияновый MiniAPM V3.1 Мини ArduPilot Мега 2.6 Внешний Компас APM Полет Контроллер
особенности:
-использовать APM прошивки и наземной станции, нет необходимости изменять
-нет на борту компас, что делает этот вариант идеально подходит для использования с multicopters и роверов
-8-КАНАЛЬНЫЙ выход и 8-КАНАЛЬНЫЙ вход
-возможность подключения к внешним GPS, компас, телеметрическая система & Acirc; и ВЕЧЕРА модуль
-12-КАНАЛЬНЫЙ функция интерфейса
-размер: 35*35 ммпакет включая:
1 шт. мини apm baord с оболочкой
1 компл. кабели
1 шт. Пауr модуль
Но неясности возникаю сразу - китайский магазин обзывает его версию двояко - 3.1 и 2.6, а как оно на самом деле?
И главное, как вы оцените этот контроллер - не урезан ли он, может, косяки есть, и вообще, достоин ли он нашего внимания, или лучше поискать другой? 😉
нужно сделать реверс право лево.Т.Е при наклоне в право Мр показывает наклон в лево
Ничего делать не надо, МР показывает не наклон коптера, а наклон горизонта при виде “из кабины”. Если Вам это не нравится, кликните правой кнопкой мышки в этом окошке и выберите Russian HUD.
как вы оцените этот контроллер - не урезан ли он, может, косяки есть, и вообще, достоин ли он нашего внимания, или лучше поискать другой?
В целом, это обычный 2.6, только переразведенный под двухсторонний монтаж и разъемы другие установлены. Косяки есть: На проводах выходов моторов стоят разъемы “мама”, точно такие же, как на регуляторах, так что, просто так подключить не выйдет, нужно будет паять или как то еще их соединять. Второй возможный косяк, на коробочке может быть неправильно указан порядок моторов. А в остальном - все хорошо, многие летают на таких.
Очень загадочная ситуация у меня вышла.
Была у меня как-то проблема с радио телеметрией 433Mhz, суть которой сводилось к тому, что если включить компьютер и коптер, сунуть USB свисток в комп, то mission planner к коптеру подключался только с первого раза, потом, если отключиться и пытаться подключиться заново, то подключение не происходит, даже если на коптере питание отключать, подключать, перегружать mission planner, все без толку. Наверно, надо было еще комп выключить и дать ему постоять.
Так вот, пересобрал я коптер, грубо говоря, построил новый. Но использовал тот же полетник, и купил я взамен этой телеметрии WiFi телеметрию.
Вчера ее воткнул в полетник, комп увидел новую сетку WiFi, я запустил mission planner и подключился удачно к коптеру (IP адресс, порт и UDP протокол), поигрался двигателями, поглядел настройки, параметры, все чудно работало и достаточно быстро.
После этого опять, отконектил mission planner от коптера… и усо, приплыли, опять не могу подключиться, что только не делал, забыл лишь копм выключать.
Уже даже не знаю, неужели это в компе дело? Что за странное поведение, с чем может быть связано, есть идеи?
ЗЫ по USB всегда хорошо соединяется
ЗЗЫ еще сегодня поэкспериментирую, но даже не знаю куда и копать.
В общем порешил проблему, но вопросы остались…
Вчера экспериментировал и отключил OSD от полетника… И все наладилось! Связь стабильна, комп отключаю, подключаю к полетнику по WiFi много раз, ни одной проблемы и сбоя.
Подключаю опять OSD и все по новой, комп не подключается к полетнику. С чем это связано не пойму.
Дальше веселей, у меня OSD подключен к telem2, а WiFi модуль к telem1, попробовал поменять местами, OSD к telem1, а WiFi к telem2, и к моему удивлению все завелось, нет проблем с подключением.
В настройках полетника одни и те же параметры для портов telem1 и telem2, скорость 57, и вывод телеметрии по протоколу mavlink1.
Оно то все решилось, только вот не могу понять, что это, черная магия?
ЗЫ не проверил как работает OSD, может она теперь отваливается 😃)))
Попробуйте подсоединить как надо и сделать сброс параметров по умолчанию. Тоже было что-то подобное, помогло.
В настройках полетника одни и те же параметры для портов telem1 и telem2
если речь о двух каналах телеметрии
то начать надо с этого:
-какая версия полетника.
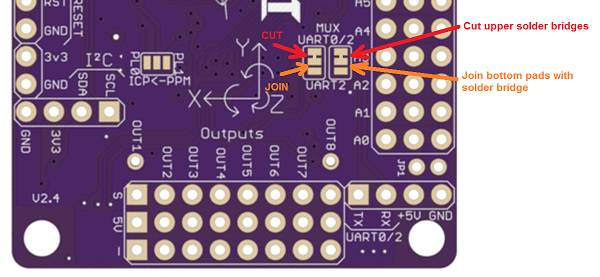
если классический апм 2.0-2.6- то в нем что гнездо телеметрии мультиплексируется с юсарт 0 по очереди с юсб что выведеный вбок юсарт0 напрямую подключен к атмете к тому же юсарт0
поэтому если вы не меняли перемычки на плате отвечающие за порты то подключать осд можно только по трем проводам. те. tx осд не подключать.
если же у вас специфичный клон или переустановлены перемычки перебрасывающие гнездо телеметрии на юсарт2 то проблему надо начинать обсуждать предварительно описав сделанные изменения
Подскажите пожалуйста. Есть ли смысл с apm 2.6 переходить на пикхавк? Будет ли стабильнее и плавнее полёт? На али нахожу пикхавки по 3-4т.р. Они нормальные вообще?
Они нормальные вообще?
общее правило по али таково -смотрите сколько алмазов у продавца, читайте отзывы покупателей, если рейтинг положительных отзывов ниже 98% - это повод насторожиться, выбираете отзывы по категории негативные и внимательно изучаете проблему.
обычно 3-4 тр это стоимость деталей использованных в производстве, такой производитель как минимум не делает отк , если это только перепродавец а не производитель- возможно это скупка отбраковки по несущественным деффектам или возможно после ремонта-восстановления. Есть и такие которые получив возврат брака заново его отправляют новому покупателю.
лучший способ взять задешево - заручиться рекомендацией коллег, тоесть взять у проверенного продавца, даже если у него на 100р дороже чем вы нашли.
обычно последние 100р экономии в поиске самого дешевого играют роковую роль
Только недавно обсуждали , а какие реги собираетесь использовать? От них тоже плавность зависит.
Про пиксы лучше спрашивать в теме про пиксы. А так на али все как на али.
помимо неисправности мпу6000 может быть
-нет 3,3 вольта или сильно занижено или сильно завышено
-непропай мпу
-непропай или неисправность конвертера уровней через который мпу подключена к атмеге
-непропай ног атмеги или сама атмега.
-неисправность барометра (он сидит на тех же портах что и мпу)
-неисправность высоковольтного конденсатора cpump
-3,3 проверено - все ок
-пробовал, никаких изменений
-как проверить конвертер уровней?
-атмега новая, 100% живая
-барометр тоже поменян
-что не так может быть с конденсатором?! о_0 и который это?
ПС: предполагаю вопросы ) Железка не единственная, просто интересно оживить - после краша. Сама плата физических повреждений не имела.
как проверить конвертер уровней?
замена, сравнение что на входе что на выходе.
-барометр тоже поменян
барик выглядит симетрично легко перевернуть нечаянно
-что не так может быть с конденсатором?! о_0 и который это
трещина и обрыв, пробой-кз, пробой возникающий при рабочем напряжении
тот что в сторону баро вынесен, посмотрите cpout по схеме или даташиту на мпу
Только недавно обсуждали , а какие реги собираетесь использовать? От них тоже плавность зависит.
Про пиксы лучше спрашивать в теме про пиксы. А так на али все как на али.
Да я не знаю даже. Сейчас стоит какойто нонейм на 20а… Сильно от регов может зависить? провалы изза регов по току может быть? Столкнулся со странностью, при колибровке моторов, иногда при плавном прибавлении хода возникает яма по току… т.е. прям вот совсем не крутит. Это изза регов?
А по поводу пиксы спрашиваю тут по причине, что имею апм, но думаю стоит или нет переходить на пиксу. Какие плюсы у пикхавка относительно апм?
В целом, это обычный 2.6, только переразведенный под двухсторонний монтаж и разъемы другие установлены. Косяки есть: … А в остальном - все хорошо, многие летают на таких.
Т.е. можно смело брать такой, только придется дополнить внешним компасом, которого тут вообще нет?
Или существуют такие же по размерам 35x35, но получше, без косяков?
Т.е. можно смело брать такой
Можно, летать будет, вполне себе контроллер.
Летал у меня на 300, 400, 550 рамах.
На мелколете 230 тоже.
Но лучше из этого размера сразу брать Pixracer.
ИМХО.
Но лучше из этого размера сразу брать Pixracer.
ИМХО.
Ну… я бы, если именно для мелочи, все же на miniAPM остановился - легче, меньше. В рейсере много деталей повыкидывали по сравнению с большим оригиналом, как-то доверия не внушает (((
Но… опять же, смотря какая цель. Что от контроллера человеку нужно? Как летать хотите?
пиксрейсер зачетный контроллер. задуман для мелких аппаратов, имет возможность подключить до 6 выходов
тоесть при квадре можно две сервы для исполнительных устройств или при гексе уже ничего.
имхо зря они сделали вайфай модем частью контрукции, лучшеб порты оставили хотябы до 8 выходов
ваншота125 не будет. т.е. для идеального полета либо blheli_S регули либо с 1000 шагами симонк.
к примеру с литлби регами будет резковат и дискретен изза 255 шагов
гироскопы хорошие
если переходить с апм для аппартов размера 450 и больше то из разницы почувствуете бескончное пространство для логов на сд карте, меньше проблем с унитазингом при кривом компасе.
а так функционал с точки зрения пользователя и у апм достаточен