А давайте обсудим Arducopter - APM

про heartbeat packets пишется когда пытаетесь делать конект, прошивка заливается при отключенном конекте, если плата не отвечает там есть сообщение, но не про heartbeat
прошивка обновляется через бутлоадер, а сердцебиение это процесс самой прошивки
выбираете ком порт но не жмете конект, заходите в тип прошивки и выбираете.
после того как все залилось - выбираете скорость 115200 и жмете конект. если прошивка не запустилась то будет вам ошибка хербет.
для диагностики проблем загрузите ардукоптерную прошивку версии 3.1.5 - там будет возможность подулючиться в CLI консоль и сделать диагностику работы сенсоров.
если к примеру нет напряжения 3.3вольт или по иным причинам не работает mpu6000 то приконектиться не получится
если к примеру нет напряжения 3.3вольт или по иным причинам не работает mpu6000 то приконектиться не получится
у меня в I2C порту 5 вольт, похоже сгорел стаб на 3.3в… спасибо за наводку, на неделе будем ковырять…
Приветствую всех!
Подскажите пожалуйста: нос коптера на карте в MP повернут на 90 градусов относительно реального носа коптера. Используется вынесенный внешний Ublox M8N китайский. После изменения параметра ориентации на Yaw90 ничего не меняется. Нос так и остается в МР повернутым неверно. Возникает ошибка Bad compas health. Видимо после изменения параметра установки компаса нужно делать калибровку компаса? Просто не было пока возможности проверить дома. Без калибровки ничего не менялось. Так же пробовал отключить внешний компас и оставить внутренний (тоже без калибровки) - все без изменений.
Нужна ли калибровка после изменения параметров установки компаса?
нос коптера на карте в MP повернут на 90 градусов относительно реального носа коптера
не обращайте внимания на рисунок коптера. там независимо от выбранной рамы и конфигурации рисуется квадрокоптер с ориентацией икс. смотрите на красную линию - это перед полетника, тоесть “нос”
компас лучше всего оринтировать по нарисованной стрелке и не указывать какие либо повороты в программном конфиге.
на показания красной линии на реальные стороны света влияет настройка деклинейшен. по умолчанию деклинейшен расчитывается программно исходя из полученных жпс координат, но если нужно его можно задать вручную, в параметре он исчисляется в радианах и может быть задано как отрицательное так и положительное число
у меня в I2C порту 5 вольт, похоже сгорел стаб на 3.3в… спасибо за наводку, на неделе будем ковырять…
посмотрите у меня в первых дневничках, там есть статья о нескольких кустарных решениях
не обращайте внимания на рисунок коптера. та
Спасибо!
Мой АПМмини без памяти. Чуть ранее писали что может помочь прогрев микросхемы феном. Фена нет и где греть не знаю. Есть возможность через друга друга прогреть в специальной печи. Какую температуру можно или нужно поставить?
посмотрите у меня в первых дневничках, там есть статья о нескольких кустарных решениях
Получилось оживить, но не до конца, итак.
Как оказалось была убита atmega 32u2, поставил на среднюю из трёх вилок перемычку, замкнул RST и GND в разъёме SPI, нашлось что то типа 2560DFU, установил драйвера, через программу Flip и файлик "ArduPPM v2.3.17_ATMega32U2.hex " прошил маленькую atmega 32u2, отключаю, снова ставлю на первую вилку перемычку, определяется как arduino 2560, захожу в MPlaner, указываю COM-Порт и о чудо, сетодиоды начинают весело моргать, радость не долгая, заливается прошивка, проверяется - всё ОК, хочу сделать CONNECT, и ничего не выходит, пишет что мол Trying to connect и таймер обратного отсчёта, проходит время вижу надпись "Only 1 heatbeat packet receaved@. заходим в терминал и вижу:
Подскажите коллеги, вот я недавно пересобрал немного раму чтобы лопасти в кадр не лезли и она стала из Н чуть напоминать V (задние моторы ближе друг к другу чем передние примерно на 2 см), столь ли существенно менять в настройке контроллера тип рамы ? И в чем вообще сакральный смысл типов рамы (Х, Н, V) в каких то хитрых расчетах, пидах ?
Trying to connect и таймер обратного отсчёта, проходит время вижу надпись "Only 1 heatbeat packet receaved
похоже у меня нечто подобное тоже… только до терминала не добрался… расскажи как решишь проблему, пожалуйста.
Столкнулся с небольшой проблемой. В Лоитере коптер висит очень хорошо, но стоит полетать при ярком солнце, то он начинает плавать по высоте, то вниз то вверх. Как только в тень залетаю, сразу все ок. Я так понимаю дело в защите барометра, но там паралонка заводская имеется. Что можно сделать? Покраска пластикового корпуса изнутри черной краской решит эту проблему?
заходим в терминал и вижу:
пишет что не читается барометр, возможно сгорел когда ему вместо питания 3.3 вольт подавали 5
видимо паролонки не хватает. Надо оклеить чем то что не пропускает свет. Например фольга алюминиевая.
Что можно сделать?
похоже у меня нечто подобное тоже… только до терминала не добрался… расскажи как решишь проблему, пожалуйста.
всё очень непонятно с этой платой, можно заменить барометр, он стоит 350- 550 рублей, но не факт что поможет 100% и не всплывёт что-нибудь ещё. я пока что диспут открыл на али. почитаю форум, может другие мозги возьму.
не всплывёт что-нибудь ещё
скорее всего вместе с ним mpu6000 и компас - они все 3.3 вольтовые, если вместо 3.3 частичный пробой и дорастает до 4.2 то обычно выживает все, если чистые 5 то капец.
Дилема сейчас у меня…
Борт 2.2 кг весом со всем оборудованием. Движки Gartt ML3508 700Кв и винты 14*4.7 Висит на 50% а летает на 60% без проблем.
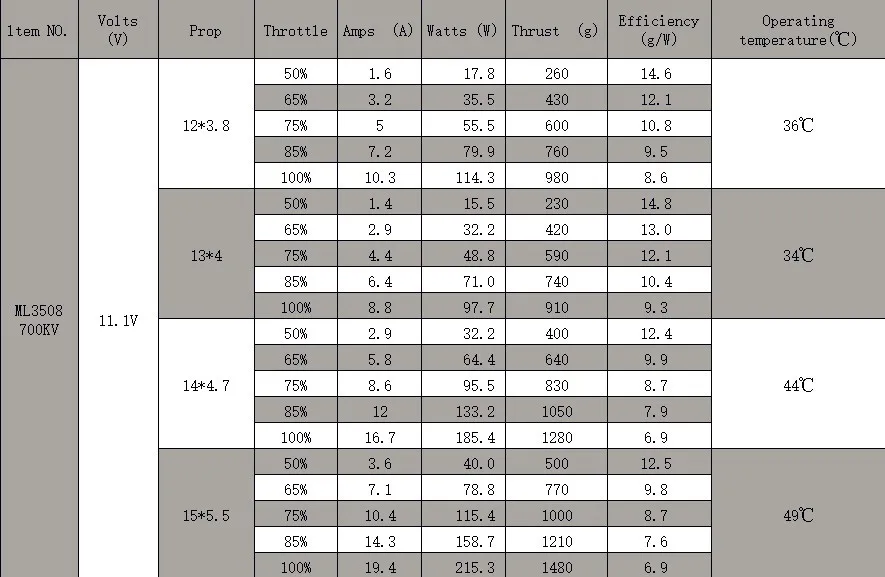
Вот такие характеристики. Жрет тока в полете 50-54А - Вот даже не знаю - для этого веса и моторов с пропами это норм? - это первое
Второе. Акк ОНБО 5200 3S 35-70С - разряжал до 9В и заливал до максимума - получалось как в аптеке - 5210мАч, Настраиваю повер модуль в МП на 5200 выставляю значение - вольтаж калибрую под значение батареи. В итоге по данным с борта акк до 20% заряда разряжается при вышеназванном токе за 7-8 мин. И потом после этого заливается в батарею 3150 мАч.
Я вот что думаю - по ходу акк вырабатывает не полностью разрешенную ёмкость. Может в МП поболее сделать ёмкость? Скажем так до 5600мАч?
В общем КАЖЕТСЯ МНЕ, что ток сильно большой, и в полете время слишком мало - вопрос исправимо ли это?
Жрет тока в полете 50-54А - Вот даже не знаю - для этого веса и моторов с пропами это норм?
фигня какаято.
скорее всего у вас датчик тока неверно откалиброван.
повесьте в нагрузку автомобильную лампу дальнего света, посомтрите ток по мишен планеру и контрольно смеряйте мультиметром или модельным “поверметром”
по таблице при 50% с 14 дюймами у вас должно быть около 3 ампер на мотор, итого 12а
не пользуйтесь % остатка батареи, он вас подведет.
обычно если коптер летает 10-15 минут то можно долетать до 3,5 вольт на банку а потом есть около минуты на посадку плюс запасик
тоесть если ваш сенсор напряжения верен - для 3 баночной батарее до 10,5 вольт.
однако нужно понимать что у батарей с высокой тотоотдачей спад после 3,5в на банку гораздо резче.
у батарей со слабыми токами спад может начаться через минуту после преодоления 3.3 вольт
фигня какаято.
скорее всего у вас датчик тока неверно откалиброван.
Блин а как его калибровать? Я думал калибровкой вольтажа всё и заканчивается. Везде пишут что надо , да что то не найду хоть одного описания.
PS А чёт нашёл - у меня на А1 подаётся питание на контроллер. Через убек. … Поёду читать дальше
Вот такие характеристики. Жрет тока в полете 50-54А - Вот даже не знаю - для этого веса и моторов с пропами это норм?
В общем КАЖЕТСЯ МНЕ, что ток сильно большой, и в полете время слишком мало - вопрос исправимо ли это?
Ток какой-то не реальный! Но и с такой ёмкостью на 2.2кг, врядли сможете летать дольше своих 8-9 минут.
Нифига не пойму и не найду - как датчик тока калибруется? Вольтметр - везде рассказывается, а тока?
как датчик тока калибруется?
Очень геморройно. Проще всего - взять автомобильную лампочку на 55 Вт и нормальный мультиметр. Нагрузить выход powermodule на лампочку. Подать питание на powermodule через мультиметр в режиме измерения тока. Ну и добиваться примерного равенства показаний.
или по иным причинам не работает mpu6000 то приконектиться не получится
вот это плохо,у меня 2 апмки валяются нерабочие,так и не понял что им не нравится,не хотят в мишке конектится,Алексей а никак ни сделfть чтоб мишка пропускала опрос датчиков при коннекте?