А давайте обсудим Arducopter - APM

не обращайте внимания на рисунок коптера. та
Спасибо!
Мой АПМмини без памяти. Чуть ранее писали что может помочь прогрев микросхемы феном. Фена нет и где греть не знаю. Есть возможность через друга друга прогреть в специальной печи. Какую температуру можно или нужно поставить?
посмотрите у меня в первых дневничках, там есть статья о нескольких кустарных решениях
Получилось оживить, но не до конца, итак.
Как оказалось была убита atmega 32u2, поставил на среднюю из трёх вилок перемычку, замкнул RST и GND в разъёме SPI, нашлось что то типа 2560DFU, установил драйвера, через программу Flip и файлик "ArduPPM v2.3.17_ATMega32U2.hex " прошил маленькую atmega 32u2, отключаю, снова ставлю на первую вилку перемычку, определяется как arduino 2560, захожу в MPlaner, указываю COM-Порт и о чудо, сетодиоды начинают весело моргать, радость не долгая, заливается прошивка, проверяется - всё ОК, хочу сделать CONNECT, и ничего не выходит, пишет что мол Trying to connect и таймер обратного отсчёта, проходит время вижу надпись "Only 1 heatbeat packet receaved@. заходим в терминал и вижу:
Подскажите коллеги, вот я недавно пересобрал немного раму чтобы лопасти в кадр не лезли и она стала из Н чуть напоминать V (задние моторы ближе друг к другу чем передние примерно на 2 см), столь ли существенно менять в настройке контроллера тип рамы ? И в чем вообще сакральный смысл типов рамы (Х, Н, V) в каких то хитрых расчетах, пидах ?
Trying to connect и таймер обратного отсчёта, проходит время вижу надпись "Only 1 heatbeat packet receaved
похоже у меня нечто подобное тоже… только до терминала не добрался… расскажи как решишь проблему, пожалуйста.
Столкнулся с небольшой проблемой. В Лоитере коптер висит очень хорошо, но стоит полетать при ярком солнце, то он начинает плавать по высоте, то вниз то вверх. Как только в тень залетаю, сразу все ок. Я так понимаю дело в защите барометра, но там паралонка заводская имеется. Что можно сделать? Покраска пластикового корпуса изнутри черной краской решит эту проблему?
заходим в терминал и вижу:
пишет что не читается барометр, возможно сгорел когда ему вместо питания 3.3 вольт подавали 5
видимо паролонки не хватает. Надо оклеить чем то что не пропускает свет. Например фольга алюминиевая.
Что можно сделать?
похоже у меня нечто подобное тоже… только до терминала не добрался… расскажи как решишь проблему, пожалуйста.
всё очень непонятно с этой платой, можно заменить барометр, он стоит 350- 550 рублей, но не факт что поможет 100% и не всплывёт что-нибудь ещё. я пока что диспут открыл на али. почитаю форум, может другие мозги возьму.
не всплывёт что-нибудь ещё
скорее всего вместе с ним mpu6000 и компас - они все 3.3 вольтовые, если вместо 3.3 частичный пробой и дорастает до 4.2 то обычно выживает все, если чистые 5 то капец.
Дилема сейчас у меня…
Борт 2.2 кг весом со всем оборудованием. Движки Gartt ML3508 700Кв и винты 14*4.7 Висит на 50% а летает на 60% без проблем.
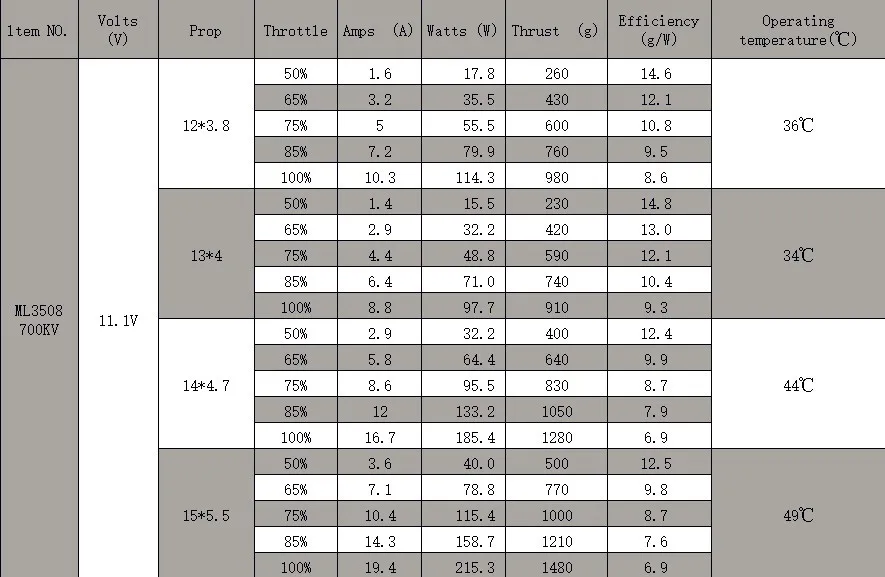
Вот такие характеристики. Жрет тока в полете 50-54А - Вот даже не знаю - для этого веса и моторов с пропами это норм? - это первое
Второе. Акк ОНБО 5200 3S 35-70С - разряжал до 9В и заливал до максимума - получалось как в аптеке - 5210мАч, Настраиваю повер модуль в МП на 5200 выставляю значение - вольтаж калибрую под значение батареи. В итоге по данным с борта акк до 20% заряда разряжается при вышеназванном токе за 7-8 мин. И потом после этого заливается в батарею 3150 мАч.
Я вот что думаю - по ходу акк вырабатывает не полностью разрешенную ёмкость. Может в МП поболее сделать ёмкость? Скажем так до 5600мАч?
В общем КАЖЕТСЯ МНЕ, что ток сильно большой, и в полете время слишком мало - вопрос исправимо ли это?
Жрет тока в полете 50-54А - Вот даже не знаю - для этого веса и моторов с пропами это норм?
фигня какаято.
скорее всего у вас датчик тока неверно откалиброван.
повесьте в нагрузку автомобильную лампу дальнего света, посомтрите ток по мишен планеру и контрольно смеряйте мультиметром или модельным “поверметром”
по таблице при 50% с 14 дюймами у вас должно быть около 3 ампер на мотор, итого 12а
не пользуйтесь % остатка батареи, он вас подведет.
обычно если коптер летает 10-15 минут то можно долетать до 3,5 вольт на банку а потом есть около минуты на посадку плюс запасик
тоесть если ваш сенсор напряжения верен - для 3 баночной батарее до 10,5 вольт.
однако нужно понимать что у батарей с высокой тотоотдачей спад после 3,5в на банку гораздо резче.
у батарей со слабыми токами спад может начаться через минуту после преодоления 3.3 вольт
фигня какаято.
скорее всего у вас датчик тока неверно откалиброван.
Блин а как его калибровать? Я думал калибровкой вольтажа всё и заканчивается. Везде пишут что надо , да что то не найду хоть одного описания.
PS А чёт нашёл - у меня на А1 подаётся питание на контроллер. Через убек. … Поёду читать дальше
Вот такие характеристики. Жрет тока в полете 50-54А - Вот даже не знаю - для этого веса и моторов с пропами это норм?
В общем КАЖЕТСЯ МНЕ, что ток сильно большой, и в полете время слишком мало - вопрос исправимо ли это?
Ток какой-то не реальный! Но и с такой ёмкостью на 2.2кг, врядли сможете летать дольше своих 8-9 минут.
Нифига не пойму и не найду - как датчик тока калибруется? Вольтметр - везде рассказывается, а тока?
как датчик тока калибруется?
Очень геморройно. Проще всего - взять автомобильную лампочку на 55 Вт и нормальный мультиметр. Нагрузить выход powermodule на лампочку. Подать питание на powermodule через мультиметр в режиме измерения тока. Ну и добиваться примерного равенства показаний.
или по иным причинам не работает mpu6000 то приконектиться не получится
вот это плохо,у меня 2 апмки валяются нерабочие,так и не понял что им не нравится,не хотят в мишке конектится,Алексей а никак ни сделfть чтоб мишка пропускала опрос датчиков при коннекте?
А, собственно Алексей выше уже то же самое описал 😃
Блин а как его калибровать? Я думал калибровкой вольтажа всё и заканчивается. Везде пишут что надо , да что то не найду хоть одного описания.
PS А чёт нашёл - у меня на А1 подаётся питание на контроллер. Через убек. … Поёду читать дальше
настроить BATT_AMP_PERVOLT количество вольт соответствующих 1А тока проходящего через сенсор тока
подробнее: для датчика тока алегро я делал русское описание, но независимо от типа датчика принцип не меняется. настраиваете чувствительность, сравниваете отображаемый ток в мишен планере с показанием контрольного прибора (мультиметр, поверметр) если не сходится - настраиваете параметры.
сначала офсетом регулируется ноль при нулевом потреблении, затем подключается балласт на ток близкий к рабочему (например мощная галогеновая 12 вольтовая лампа) и выставляется чувствительность BATT_AMP_PERVOLT
товарищи, помогите разобраться что делать! АРМ 2.6, поставил телеметрию 433мГц, делал коннект и общие настройки, контроллер почему то перестал реагировать на РУ и коннектиться к мишин планеру. ПОзже обратил внимание что при соединении к МП как по USBтак и по телеметрии, контроллер подключается лишь кратковременно при включении батареи питания к нему.
up
моя проблема видимо похожа на эту
в терминале пишет такое
(кстати как оттуда копировать текст??)
Init Arducopter V3.2.1 (36b4056fb)
Free RAM 1999
FW Ver:120
load_all took 27506us
3No dataflash inserted3COMPASS INIT ERROR
3Calibrating barometer_RQ 3barometer calibration completeo3GROUND START?Q. PFailed to boot MPU6000 5 times
Failed to boot MPU6000 5 times
Q?Failed to boot MPU6000 5 times
Failed to boot MPU6000 5 times
Q?Failed to boot MPU6000 5 times
Failed to boot MPU6000 5 times
3Initialising APM…TQLFailed to boot MPU6000 5 times
Failed to boot MPU6000 5 timesNo INS backends available
Помогите, что делать?
Помогите, что делать?
для начала проверить напряжение 3.3 вольта.
оно может быть 3.2 -3.4 вольта.
если там 0 или порядка 4 вольт и выше - это причина приведенных выше ошибок
удобно это сделать на разъеме I2C - куда подключают внешний компас