А давайте обсудим Arducopter - APM

Кто-нибудь сталкивался с такой проблемой?
Кто-нибудь сталкивался с такой проблемой?
А перезагрузку после назначения делали? И еще 1 контрольный вопрос - серва рабочая?
Ну и выход на серву (физический) правильно выбран? А то выходы можно по разному назначить, может куда в другое место сунули.
Как-то раньше работало и проблем особо не было.
Matek F765- wing & Arducopter 4.0.3
Кто-нибудь сталкивался с такой проблемой?
Похоже нет питания на серве, на pixhawk у меня нет питания ,точнее оно есть но пропадает когда серву подключаешь ,отдельно питаю
Насчет пропадания питания проверю. Так то когда подключаешь аккумулятор серва дергается. Назначаю 8 канал для нее, пробовал и другие каналы, физически не ошибся. Такое ощущение что не тот протокол в сигнале, но я не нашел чтоб он где то переключался. На регули переключается normal, dshot и еще какой то, на сервы не нашел. А мне этот подвес важен, так как он для, лидара.
Такое ощущение что не тот протокол в сигнале, но я не нашел чтоб он где то переключался.
Я что-то не слышал, чтобы сервы начали использовать новые протоколы. Он у них 1 (пвм).
Гляньте есть ли сигнал на проводе. В идеале осцилографом, но можно и тестером (хоть какое-то напряжение должно быть).
Осцилографа нету, но серва работает напрямую в приемнике. Значит чего то с этого выхода нету. Но тут даже и индикаторы как то коряво скачут.
Кто-нибудь сталкивался с такой проблемой?
Не оно ? rcopen.com/forum/f90/topic547063/8
Осцилографа нету
Жаль.
но серва работает напрямую в приемнике.
Уже хорошо.
Не оно ?
Возможно. Вполне может быть, что в новых прошивках упустили из виду протокол серв. У них должен быть только ПВМ. А может не смогли разделить. Типа: хочешь сервы - юзай только ПВМ.
Значит чего то с этого выхода нету.
Исходя из всего можно проверить 2 способами.
Поставить для моторов ПВМ и проверить сервы.
Или вместо сервы подключить рег с мотором (без винта). Регу все равно какой протокол на выходе. Только мотор сразу будет крутиться в полгаза. И менять обороты при наклоне.
Я что-то не слышал, чтобы сервы начали использовать новые протоколы. Он у них 1 (пвм).
Не совсем так - ardupilot.org/plane/docs/common-sbus-out.html
На пиксе даже отдельная колодка есть.
Типа: хочешь сервы - юзай только ПВМ.
Не так страшно. В пределах одного таймера должен быть один протокол. На моей Omnibus F4 первые шесть выходов на одной паре таймеров, последние два - на третьем. Туда можно ставить независимый протокол :
#pwm output. 1 - 4 on main header, 5 & 6 on separated header w/o 5V supply, 7 & 8 on CH5 and CH6 pads
PB0 TIM1_CH2N TIM1 PWM(1) GPIO(50)
PB1 TIM1_CH3N TIM1 PWM(2) GPIO(51)
PA3 TIM2_CH4 TIM2 PWM(3) GPIO(52)
PA2 TIM2_CH3 TIM2 PWM(4) GPIO(53)
PA1 TIM2_CH2 TIM2 PWM(5) GPIO(54)
PA8 TIM1_CH1 TIM1 PWM(6) GPIO(55)
PC8 TIM8_CH3 TIM8 PWM(7) GPIO(56)
PC9 TIM8_CH4 TIM8 PWM(8) GPIO(59)
Надо смотреть в файле hwdef.dat своей платы : github.com/ArduPilot/ardupilot/tree/…/hwdef
При необходимости можно изменить этот блок и перекомпилировать код.
Не совсем так - ardupilot.org/plane/docs/common-sbus-out.html
На пиксе даже отдельная колодка есть.
Ну там речь про СБАС идет. Вряд ли у Эдуарда такие сервы. Из его сообщения, я понял, обычные.
Хотя спасибо за инфу. Они бы лучше тогда на Дшот сделали. И протокол один, и цифра (глядишь точнее будет и наработка на отказ больше).
Не так страшно. В пределах одного таймера должен быть один протокол. На моей Omnibus F4 первые шесть выходов на одной паре таймеров, последние два - на третьем.
О чем речь - понятно. А вот с реализацией не у всех так просто.
Если Вам просто, то гляньте тогда что там у Эдуарда в прошивке.
Боюсь мне не просто бкдет найти этот файл, даже не знаю где))) Но я настырный. Не в командной ли строке?
Это файл исходного текста. Если Вы исходники прошивки не качали, то на машине его нет.
Вот он - github.com/ArduPilot/ardupilot/blob/…/hwdef.dat
И вот группировка выходов по таймерам. Более грамотная, чем у меня, надо сказать. Логика та же - на выходы с одним номером таймера (TIMx) нельзя назначить разные протоколы. Либо мотор, либо серва.
# Motors
PA0 TIM2_CH1 TIM2 PWM(1) GPIO(50)
PA1 TIM2_CH2 TIM2 PWM(2) GPIO(51)
PA2 TIM5_CH3 TIM5 PWM(3) GPIO(52)
PA3 TIM5_CH4 TIM5 PWM(4) GPIO(53)
PB0 TIM8_CH2N TIM8 PWM(5) GPIO(54)
PB1 TIM8_CH3N TIM8 PWM(6) GPIO(55)
PD12 TIM4_CH1 TIM4 PWM(7) GPIO(56)
PD13 TIM4_CH2 TIM4 PWM(8) GPIO(57)
PD14 TIM4_CH3 TIM4 PWM(9) GPIO(58)
PD15 TIM4_CH4 TIM4 PWM(10) GPIO(59)
PE5 TIM9_CH1 TIM9 PWM(11) GPIO(60) NODMA
PE6 TIM9_CH2 TIM9 PWM(12) GPIO(61) NODMA
PA8 TIM1_CH1 TIM1 PWM(13) GPIO(62) # for WS2812 LED
Вот тут это в явном виде сказано : ardupilot.org/…/common-matekf765-wing.html
Гляньте еще в MP параметр SERVO_RATE, там 50 Гц ?
SERVO_RATE: Servo default output rate
This sets the default output rate in Hz for all outputs.
Большое спасибо за ёмкий ответ. Серво рейт ( или как там произношение?) конечно гляну. Если не поможет то получается что исправить не получится по крайней мере в этой прошивке?
А как же серва которая должна в путевой точке включать например отцеп груза?
Да, там 50 герц в серво рейт
Да, там 50 герц в серво рейт
Ну серве минус точно нужен. И для питания, и для сигнала. На одном сигнале работать не будет. Ну и плюс питания конечно. Надо проверять все выходы.
Вы проверки, о которых писал ранее делали?
Ну и это поеятно что минус нужен))) я его взял с другого места. Но серва не двигается, хотя одникаторы на этом канале показывают движение зеленой полоской. Попробовал подключить сюда сигнальный провод с регуля, мотор тоже молчит.
Отсутствие земли на разъемах - что-то совсем странное. Как правило означает, что что-то сожжено. Или цоколевку напутали.
Моторы можно временно переключить в PWM параметром MOT_PWM_TYPE, см. ardupilot.org/copter/docs/parameters.html#mot-pwm-…
Да, плюс 5в на средних пинах не звонится с минусовыми пинами что рядом. Сжечь не мог, никаких косяков не было вроде ни при пайке, ни после. Лежит у ме6я другой такой же контроллер, но еще не впаяны разьемы. Он под самолет приготовлен, но придется его прошить и попробовать для сравнения.
и попробовать для сравнения.
Было бы неплохо.
Судя по картинке, линия питания серв Vx висит в воздухе. Ее надо запитывать от верхней платы или отдельного BEC. Сделано ?
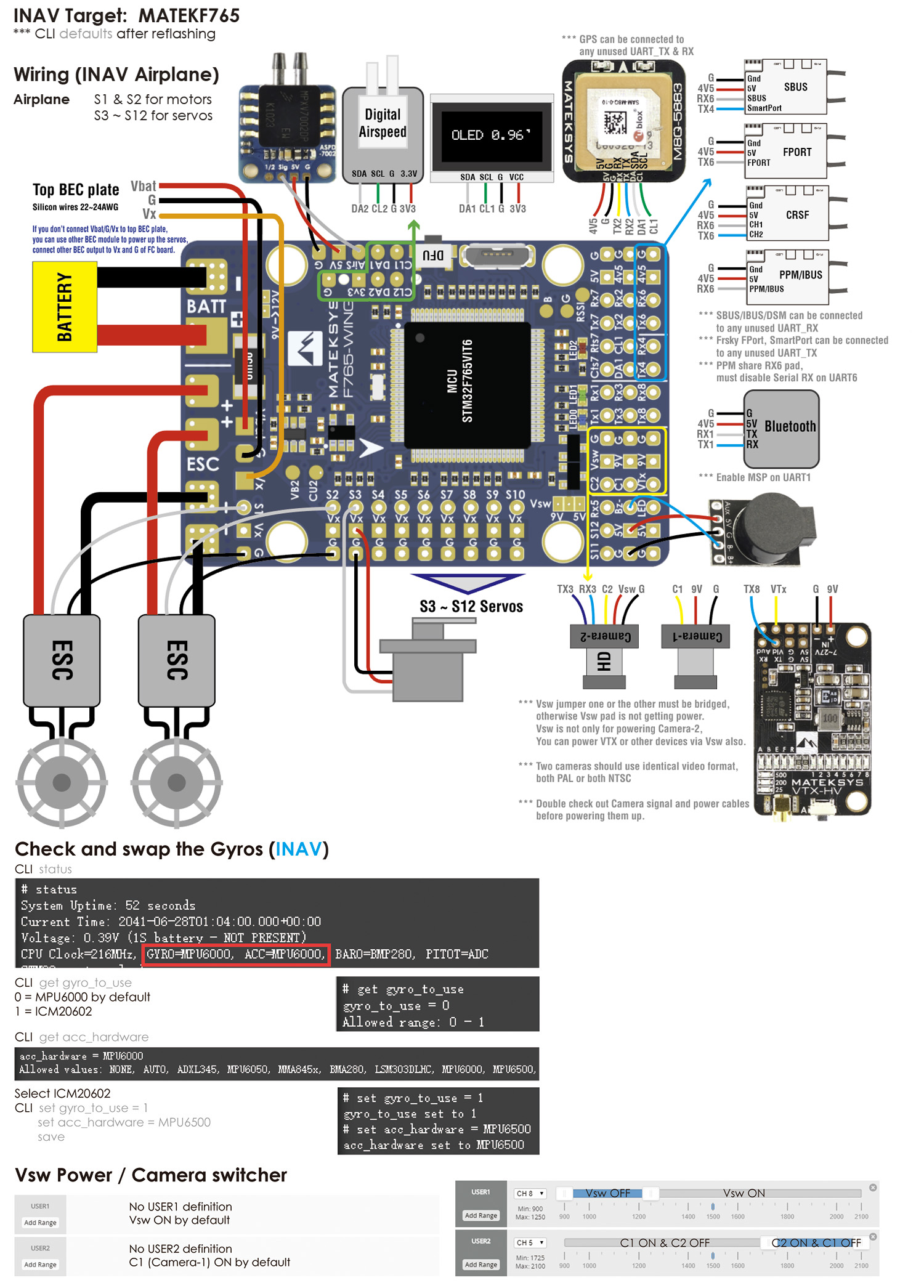
А с чего взято что линия вх в воздухе висит? Вернусь с работы попробую прозвонить их с массой верхней платы и с плюсом тоже, интересно, звонится или нет. Платы меж собой я спаял тремя проводками. Мож и правда отвалилось что пока я несколько раз верхнюю плату снимал. Действительно, ведь верхняя плата это и есть блок питания для серв. Или я ошибаюсь? Как странно, на неё идут три провода, а к ней ничего не подключено.