А давайте обсудим Arducopter - APM

Да, плюс 5в на средних пинах не звонится с минусовыми пинами что рядом. Сжечь не мог, никаких косяков не было вроде ни при пайке, ни после. Лежит у ме6я другой такой же контроллер, но еще не впаяны разьемы. Он под самолет приготовлен, но придется его прошить и попробовать для сравнения.
и попробовать для сравнения.
Было бы неплохо.
Судя по картинке, линия питания серв Vx висит в воздухе. Ее надо запитывать от верхней платы или отдельного BEC. Сделано ?
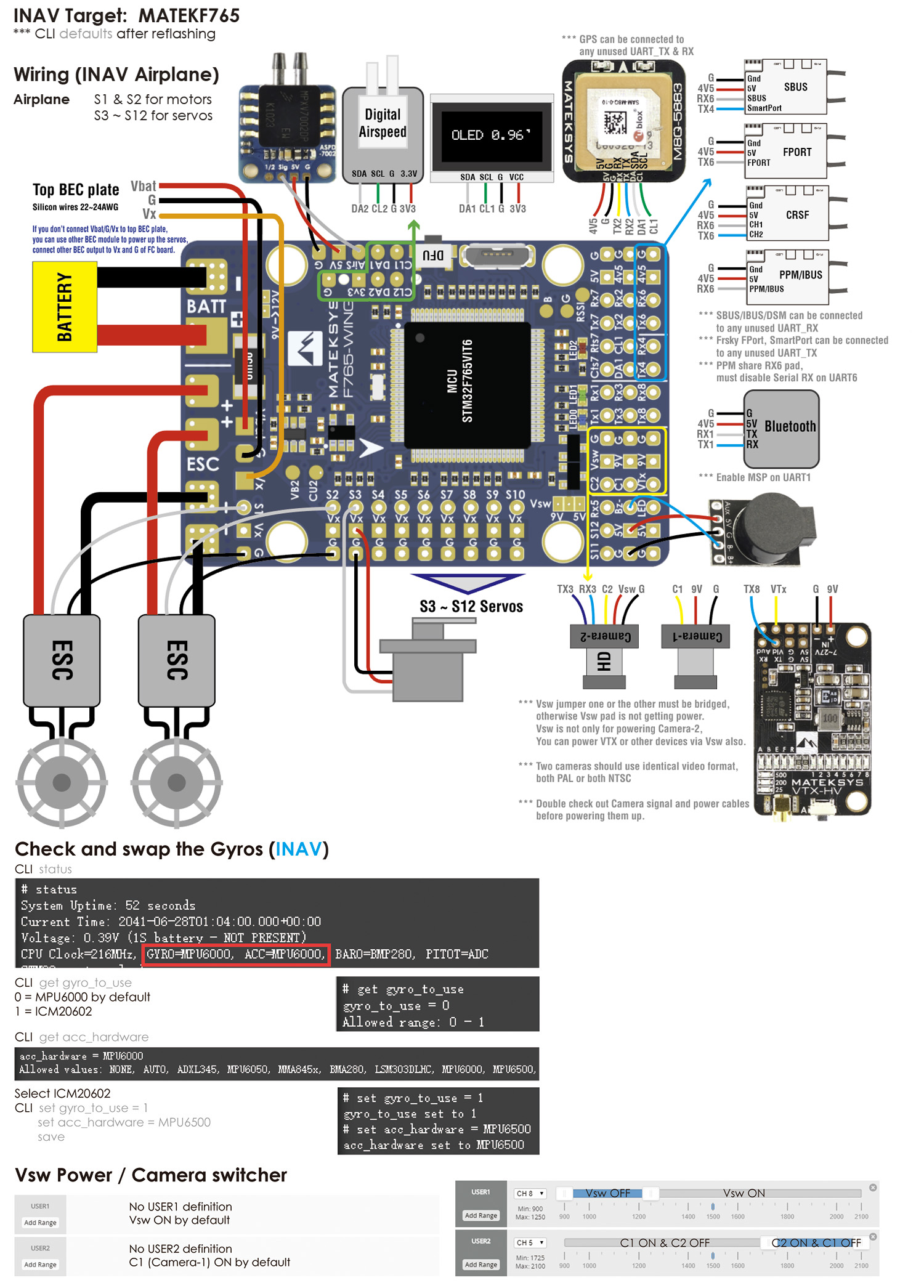
А с чего взято что линия вх в воздухе висит? Вернусь с работы попробую прозвонить их с массой верхней платы и с плюсом тоже, интересно, звонится или нет. Платы меж собой я спаял тремя проводками. Мож и правда отвалилось что пока я несколько раз верхнюю плату снимал. Действительно, ведь верхняя плата это и есть блок питания для серв. Или я ошибаюсь? Как странно, на неё идут три провода, а к ней ничего не подключено.
Взято с первого же взгляда на картинку и надписи вокруг нее. Похоже, я помогал отлаживать обесточенное устройство.
Я прошу прощения что ввел в заблуждение. Видимо у тестора не контачил щуп. Сейчас все перепроверил, масса есть, между собой прозваниваются все пины черного цвета, питание есть 5,68 вольт. На верхнюю плату приходит мои 4 банки, а с нее 5,68в. Серва молчит. Еще повторюсь что серв перепробовал кучу, все рабочие. Сам даже расстроился что причина не в обесточенном питании
Ветка что то приткхла, поэтому просто сообщу согласно предыдущего поста что сервы на сервоподвесе заработали путем другой прошивки, но дело было и не в ней. Просто на эти каналы надо было назначить крутилки и откалибровать их вместе со стиками и другими тумблерами, чего я не делал. Из-за этого сигнал был в суженном виде по середине диаппозона. Работают как при наклонах коптера, так и с крутилки одновременно.
Еще натерпелся с регулями. Тема не для регулей, но нельзя не упомянуть потому что все подозрения были на автопилот. Коптер мтпл просто отлично летать после настройки пидов, но как только напряжение (4банки) садилось до 13,8в коптер терял управление. В итоге оказалось что это уифровые гоночные регули не хотели крутить моторы с низким для них kv 610. Решилрсь путем долгих проб и ошибок с помощью программы настроек
для цифровых регулей Blhelisute. Отличные оказались регули. После этого пришлось немного смягчить пиды. Сецчас спокоцно стал летать даже на 3 банках до 8,5 вольт.
Ветка что то приткхла, поэтому просто сообщу согласно предыдущего поста что сервы на сервоподвесе заработали путем другой прошивки, но дело было и не в ней. Просто на эти каналы надо было назначить крутилки и откалибровать их вместе со стиками и другими тумблерами, чего я не делал. Из-за этого сигнал был в суженном виде по середине диаппозона. Работают как при наклонах коптера, так и с крутилки одновременно.
Еще натерпелся с регулями. Тема не для регулей, но нельзя не упомянуть потому что все подозрения были на автопилот. Коптер мтпл просто отлично летать после настройки пидов, но как только напряжение (4банки) садилось до 13,8в коптер терял управление. В итоге оказалось что это уифровые гоночные регули не хотели крутить моторы с низким для них kv 610. Решилрсь путем долгих проб и ошибок с помощью программы настроек
для цифровых регулей Blhelisute. Отличные оказались регули. После этого пришлось немного смягчить пиды. Сецчас спокоцно стал летать даже на 3 банках до 8,5 вольт.
Да в чатах сидят все ������
Привет народ! Помогите разобраться, не получается в Mission Planner настроить failsafe по питанию. Стоит модуль питания, в настройка он выбран и на главном меню отображается напряжение батарейки, но в разделе где настраивается failsafe, в списке где нужно выбрать RTL - пусто, выкидной список пустой, в чем может быть проблема?
Имеется ПК Матек CTR. Прошивка Ардукоптер последняя стабильная. Для удобства монтажа на раме, входы питания полётника, которые по умолчанию смотрят на 15 часов, повёрнуты на 90градусов и смотрят теперь на 18 часов. “AHRS_Orientation” установил равным “2” Не знаю правильно ли ибо никогда не крутил полётники. Вопроc: какие ещё правила изменить в Full parametr list для указания факта поворота платы? Переназначаются ли как то управляющие выводы на моторы или просто проводами на соответствующие площадки паять?
Переназначаются ли как то управляющие выводы на моторы или просто проводами на соответствующие площадки паять?
Я не переворачивпл плату, но надо уточнить тот ли параметр переправлен. Вполне возможно что это был переворот с брюха на бок.
Доброго времени!
Стою перед выбором полетника и прошивки для 650 коптера.
Имеется Kakute F7 AIO и Matek 722 STD. C INAV под них все понятно.
Вот думаю.
Стаивть на коптер один из этих полетников с INAV или прошить под Ardupilot.
Или заказать Pixhawk.
Что посоветуете?
Имеется Kakute F7 AIO и Matek 722 STD. C INAV под них все понятно.
Вот думаю.
Стаивть на коптер один из этих полетников с INAV или прошить под Ardupilot.
На какут ардукоптер встанет, на матек - нет, в 722 слишком маленькая флешка.
А по стабильности INAV vs Ardupilot?
Стабильность Ardupilot на Kakute vs родное железо?
Айнаву до Ардупилота гнаться еще лет 10. И то, если Ардупилот остановится в развитии. 650-й явно не для просто так огнями посверкать, поэтому рекомендую только Ардупилот на Матек 765 винг, не меньше. Но он посложнее будет чем Айнав-майнав. Но могу помочь настройками, выслать их по почте. После этого останется немного подогнать под свой конфиг.Если Пикс, то надо дорогой, среди дешевых меньше 4 тыс куча глючных подделок.
Всем привет! Стал обладателем apm 2.6, настроил на квадр.
Не могу разобраться куда подключить ходовые огни (остались диодные платы от mjx b3 и syma x8). Хотелось бы на определенные флайтмоды ставить разные мигания (пускай быстрое мигание на посадку, медленное на лоитер и постоянный свет на стабилизацию).
Помогите плз или ткните носом, где копать.
Заранее спасибо)
Хотелось бы на определенные флайтмоды ставить разные мигания (пускай быстрое мигание на посадку, медленное на лоитер и постоянный свет на стабилизацию).
Контроллер света подключить к telemetry порту. Контроллер должен получать mavlink и уметь нужные нужные Вам функции.
По своей проблеме с переворотами докладываю итог, вдруг кому пригодится. Дело было не в регулях и не в автопилоте, и не в моторах, все банально, проводка старая была, в лучах на пайке видимо с кислотой, все съедено. Т.е. причина банальные неконтакты, точнее плохие контакты, что в силовых проводах, что в сервопроводах. Выкинул всю проводку, сделал заново, и коптер летает.
Спецы!
Оцените такой набор.
aliexpress.ru/item/32699852974.html?spm=a2g0s.8937…
Куча прибамбасов. Надо иметь в виду что еще и проводов столько же будет. Оно надо? Куда проще Матек 765 винг поставить и прошить Арду. Всё будет в одной коробочке. В него даже две камеры можно воткнуть и переключаться между ними. Отдельно только видеопередатчик и GPS, все остальное уже в нём.