А давайте обсудим Arducopter - APM

Блин и правда заработала телеметрия после нажатия этой заветной кнопки после которой арду даже ничего не говорит и галочка никакая не появляется… мдя…
А чуть ветер в морду - и привет, эпилепсия.
Нет.
Блин и правда заработала телеметрия после нажатия этой заветной кнопки после которой арду даже ничего не говорит и галочка никакая не появляется… мдя…
Сам в шоке от этого арду.
Блин я себе собрал 4.0.6 dev - думаю не рухну ли… ну пофиг будет врем попробую не думаю что прям косячные билды .
На 4.1.0 (с оф.сайта) летают два коптера и Х-8. Вроде всё хорошо…
и галочка никакая не появляется… мдя…
Просто телеметрия появляется,если не было…😁
А чуть ветер в морду - и привет, эпилепсия.
Чайзер 1,2м около килограмма,на стоковых пидах весь прошлый сезон,в любой ветер. Всё ровно было. Для рептильки наверно резковаты будут сток…
На 4.1.0 (с оф.сайта)
Брехня, нет такого релиза.
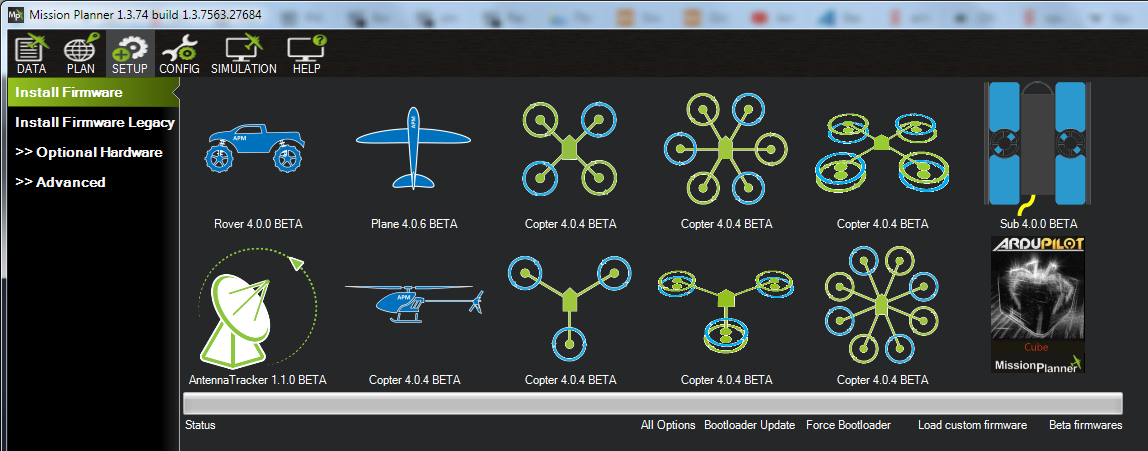
И даже бетки нет.
Чайзер 1,2м около килограмма,на стоковых пидах весь прошлый сезон,в любой ветер. Всё ровно было.
Ну, если вы не понимаете разницу между моделями размахом 0.8 и 1.2 и двукратной разницей в весе - о чем с вами говорить? 😁
Брехня, нет такого релиза. И даже бетки нет.
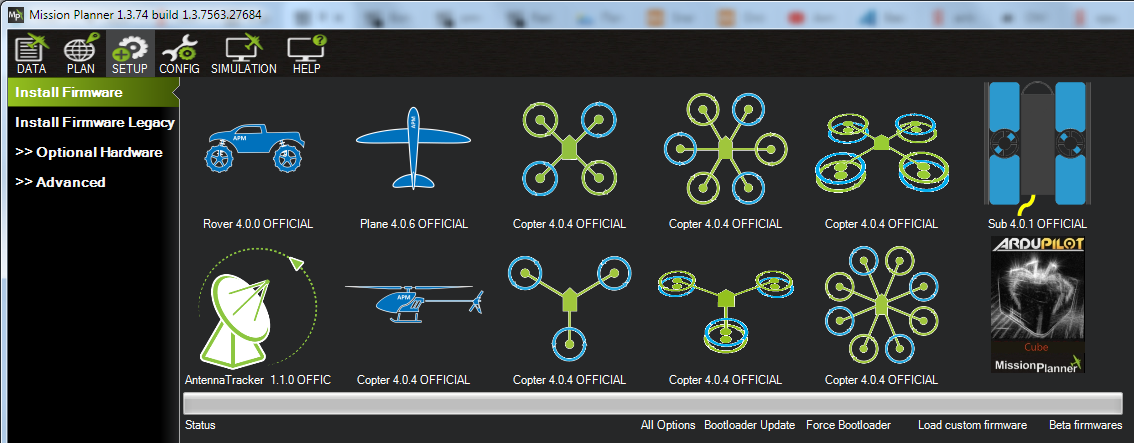
Папка latest содержит последние билды - вот в ней и есть 4.1.0 dev билды
firmware.ardupilot.org/Copter/latest/
Папка latest содержит последние билды - вот в ней и есть 4.1.0 dev билды
Это найтбилды, но… прикол в том, что с такой пометкой там идут ВСЕ найтбилды 4.0.х, в том числе и те, что стали потом релизами 4.0.х.
Не говоря уже о том, что писать о “версии 4.1.0” для найтбилда - глупость, так как они ВСЕ с такой версией, а обновляются ежесуточно. То есть “версия 4.1.0” совершенно не конкретизирует - о каком именно из горы найтбилдов идёт речь (а косяки в них появляются и исчезают).
Реальную текущую версию можно понять лишь по git-веткам.
Так в этом и суть билдов каждый день - собирается текущая ветка прошивки. Изменения можно глянуть на гитхабе в разделе истории коммитов…
В какой то момент "ночная сборка " перейдет в релиз но не сама сборка а текущее состояние дерева которое по мнению разрабов стало стабильным
В какой то момент "ночная сборка " перейдет в релиз
а её версия “внезапно” изменится с 4.1.0-dev на 4.0.4, к примеру. Хотя исходники на момент сборки стабильного релиза (или беты) будут идентичными dev-версии.
Потому и написал, что указывать “формальную” версию ночной сборки - совершенно неинформативно.
а её версия “внезапно” изменится с 4.1.0-dev на 4.0.4, к примеру. Хотя исходники на момент сборки стабильного релиза (или беты) будут идентичными dev-версии.
Потому и написал, что указывать “формальную” версию ночной сборки - совершенно неинформативно.
С чего вдруг оно изменится? Есть ветка master branch в ней всегда текущее состояние а есть brunch 4.0.4 4.0.3 и т.д. И никогда ветка мастер не станет 4.0.4 - для нее есть отдельная ветка куда попадут коммиты только для версии 4.0.4 не более. А по вашим рассуждениям можно сделать вывод что в версию 4.0.4 могут попасть изменения или доп. функции из версии 4.1.х - нет такого - ибо для этого версии и существуют чтобы можно было четко знать что в версии 4.1.0 к примеру появилась функция такая то и ее нету в 4.0.4
Так в айнаве можно включить либо выключить телеметрию. А в арду надо сначала с компа подключиться на данный порт, после чего пойдет телеметрия, либо включить принудительно телеметрию в этом разделе osd, так как платка osd не умеет обшаться с полетником.
С тех пор как перешёл на пиксы не разу не так не делал. На APM проблема была.
С тех пор как перешёл на пиксы не разу не так не делал. На APM проблема была.
Походу в арду телеметрия пойдет сама если она двухсторонняя и наземная станция соизволит оповестить об этом арду а если как с Лорой то видимо из-за этого и надо жать эту кнопку заветную
С тех пор как перешёл на пиксы не разу не так не делал. На APM проблема была.
Пиксов нету, но на АПМ и матеке ф405-wing (ф765-винг тоже) такие проблемы есть с односторонней телеметрией. У кого двухсторонняя телеметрия скорее всего такую проблему не встретят.
А как тут переходить с одной прошивки на другую? Достаточно обновить поверх? Или сохранить все параметры, а после обновления восстановить их?
А как тут переходить с одной прошивки на другую? Достаточно обновить поверх?
Если обновлять через MP, то параметры сохраняются. Правда, я не пробовал шить через Load custom firmware, а без этого получится прошить либо на крайний релиз либо на крайнюю бету.
Или сохранить все параметры, а после обновления восстановить их?
Так тоже можно прошить - даже не через MP, а через iNAV или BF-конфигуратор (со стиранием флеша). Правда, с восстановлением параметров “есть нюансы” - восстанавливать нужно несколько раз подряд, так как, к примеру, параметры страниц OSD с первого раза не пропишутся, а отработает лишь команда OSD screen Х enable. И ещё в каких-то разделах была такая же фигня - с первого восстановления параметров отрабатывал лишь “флажок разблокировки раздела”, а параметры раздела шились лишь со второго раза. К вопрос о костылях и тяжелом эволюционном пути арду.
А кому сейчас жить легко?
Буду восстанавливать параметры с 10 попыток 😃
Чтото тут вспомнил что матеки через MP вроде не прошиваються.
Я шью через load custom firmware - файл качать надо с расширением apj. Но у меня не матек - но и разницы не вижу - загрузчик один и тот же…
Интересно кто нибудь занимался настройкой вот этой хрени
ardupilot.org/…/common-imu-notch-filtering.html
У меня точно не apj.
У меня точно не apj.
В смысле не apj? Прошивки в формате apj можно скачать для вашего матека тут
firmware.ardupilot.org
Выбираете что Вам надо fixed или copter версию и далее выбираете версию прошивки затем вашу плату и там лежат прошивки с загрузчиком и без оттуда вам нужен apj - пример:
firmware.ardupilot.org/Copter/…/MatekF405-Wing/
Я занимался настройкой фильтров. Пока искал инфу случайно наткнулся на данный пост о фильтрах и решил попробовать. Разницы не заметил, что с ними, что без них летает в пределах нормы.
Пока мелкий разбит и запчасти только въехали на границу, настраиваю пяти килограммовую гексу. Посмотрел логи, самый большой резонанс на 147гц, есть еще два мелких резонанса на ~200 и на ~90 гц (на память пишу). Фильтром лучше глушить самый большой всплеск резонанса или ваши варианты?
Так же обратил внимание на количество спутников gps. На арду как-то поменьше их и ловит подольше, на айнаве через 20-30 секунд уже 22-24 спутника, а в середине полета 28-30.
Раньше на апм рекомендовали залить файл настроек. Сейчас на арду, как я понял можно в настройках вбить параметры, а потом арду сам закинет их в gps. Беглый поиск по инету не дал конкретных советов какие параметры вбивать для коптера.
Так же нашел параметры, которые отвечают за положение приемника относительно центра коптера, тоесть можно указать в сантиметрах где конкретно этот приемник приделан. На назе такая фишка тоже есть и рекомендуется для настройки. Тут нужно это настраивать?
Так же на даче сделал автотюн, вроде летать стал лучше, чем на стоковых пидах. Но в режиме лойтера была замеченна особенность: когда летишь и потом отпускаешь стик: гекса сначала выравнивается в горизонте, по инерции пролетает пару метров и потом коптер резко наклоняется в противоположную сторону, что затормозить. Даже пытался плавно стики «опускать» к центру, все равно мелкий рывок наблюдается при попытке остановиться.
Можно ли что-то подкрутить, чтобы гекса както плавнее тормозил и/или раньше начинал производить плавную остановку. В остальном нареканий пока нету.
Пока не летал ещё 😃 но поиском нашел
ardupilot.org/copter/docs/loiter-mode.html
Ваша проблема видима в
LOIT_BRK_DELAY - задержка с секундах когда начинать тормозить после отпускания стиков… но и другие параметры тоже надо ковырять видимо…
У кого двухсторонняя телеметрия скорее всего такую проблему не встретят.
В том то и дело что тоже лора, тоже односторонняя.
На matek f765-wing тоже на лоре, заработала сразу.