А давайте обсудим Arducopter - APM

каким параметром возможно изменить высоту взлёта по команде -take off ???
Так в документации написано:
TAKEOFF Flight Mode
In Arduplane 4.0 and later, Automatic Takeoff is also a mode itself. When entered, the plane will use maximum throttle as set by the TKOFF_THR_MAX parameter, climbing with TKOFF_LVL_PITCH maximum to the TKOFF_ALT altitude and proceeding at the initial launch heading until TKOFF_DIST from the point where the mode is entered. It will then loiter, as in LOITER mode, at TKOFF_ALT altitude until the mode is changed.
Once TKOFF_LVL_ALT is reached, or the loiter point distance is reached, maximum throttle and takeoff roll limits (LEVEL_ROLL_LIMIT ) are stopped and normal navigation begins to the loiter point and altitude.
If the mode is entered while already flying, it will immediately begin loitering as in LOITER mode.
TAKEOFF mode can also be entered via a switch using an RCx_OPTION = 77, as well as via normal selection by the flight mode channel.
Кто-нибудь сталкивался с такой проблемой?
Кто-нибудь сталкивался с такой проблемой?
А перезагрузку после назначения делали? И еще 1 контрольный вопрос - серва рабочая?
Ну и выход на серву (физический) правильно выбран? А то выходы можно по разному назначить, может куда в другое место сунули.
Как-то раньше работало и проблем особо не было.
Matek F765- wing & Arducopter 4.0.3
Кто-нибудь сталкивался с такой проблемой?
Похоже нет питания на серве, на pixhawk у меня нет питания ,точнее оно есть но пропадает когда серву подключаешь ,отдельно питаю
Насчет пропадания питания проверю. Так то когда подключаешь аккумулятор серва дергается. Назначаю 8 канал для нее, пробовал и другие каналы, физически не ошибся. Такое ощущение что не тот протокол в сигнале, но я не нашел чтоб он где то переключался. На регули переключается normal, dshot и еще какой то, на сервы не нашел. А мне этот подвес важен, так как он для, лидара.
Такое ощущение что не тот протокол в сигнале, но я не нашел чтоб он где то переключался.
Я что-то не слышал, чтобы сервы начали использовать новые протоколы. Он у них 1 (пвм).
Гляньте есть ли сигнал на проводе. В идеале осцилографом, но можно и тестером (хоть какое-то напряжение должно быть).
Осцилографа нету, но серва работает напрямую в приемнике. Значит чего то с этого выхода нету. Но тут даже и индикаторы как то коряво скачут.
Кто-нибудь сталкивался с такой проблемой?
Не оно ? rcopen.com/forum/f90/topic547063/8
Осцилографа нету
Жаль.
но серва работает напрямую в приемнике.
Уже хорошо.
Не оно ?
Возможно. Вполне может быть, что в новых прошивках упустили из виду протокол серв. У них должен быть только ПВМ. А может не смогли разделить. Типа: хочешь сервы - юзай только ПВМ.
Значит чего то с этого выхода нету.
Исходя из всего можно проверить 2 способами.
Поставить для моторов ПВМ и проверить сервы.
Или вместо сервы подключить рег с мотором (без винта). Регу все равно какой протокол на выходе. Только мотор сразу будет крутиться в полгаза. И менять обороты при наклоне.
Я что-то не слышал, чтобы сервы начали использовать новые протоколы. Он у них 1 (пвм).
Не совсем так - ardupilot.org/plane/docs/common-sbus-out.html
На пиксе даже отдельная колодка есть.
Типа: хочешь сервы - юзай только ПВМ.
Не так страшно. В пределах одного таймера должен быть один протокол. На моей Omnibus F4 первые шесть выходов на одной паре таймеров, последние два - на третьем. Туда можно ставить независимый протокол :
#pwm output. 1 - 4 on main header, 5 & 6 on separated header w/o 5V supply, 7 & 8 on CH5 and CH6 pads
PB0 TIM1_CH2N TIM1 PWM(1) GPIO(50)
PB1 TIM1_CH3N TIM1 PWM(2) GPIO(51)
PA3 TIM2_CH4 TIM2 PWM(3) GPIO(52)
PA2 TIM2_CH3 TIM2 PWM(4) GPIO(53)
PA1 TIM2_CH2 TIM2 PWM(5) GPIO(54)
PA8 TIM1_CH1 TIM1 PWM(6) GPIO(55)
PC8 TIM8_CH3 TIM8 PWM(7) GPIO(56)
PC9 TIM8_CH4 TIM8 PWM(8) GPIO(59)
Надо смотреть в файле hwdef.dat своей платы : github.com/ArduPilot/ardupilot/tree/…/hwdef
При необходимости можно изменить этот блок и перекомпилировать код.
Не совсем так - ardupilot.org/plane/docs/common-sbus-out.html
На пиксе даже отдельная колодка есть.
Ну там речь про СБАС идет. Вряд ли у Эдуарда такие сервы. Из его сообщения, я понял, обычные.
Хотя спасибо за инфу. Они бы лучше тогда на Дшот сделали. И протокол один, и цифра (глядишь точнее будет и наработка на отказ больше).
Не так страшно. В пределах одного таймера должен быть один протокол. На моей Omnibus F4 первые шесть выходов на одной паре таймеров, последние два - на третьем.
О чем речь - понятно. А вот с реализацией не у всех так просто.
Если Вам просто, то гляньте тогда что там у Эдуарда в прошивке.
Боюсь мне не просто бкдет найти этот файл, даже не знаю где))) Но я настырный. Не в командной ли строке?
Это файл исходного текста. Если Вы исходники прошивки не качали, то на машине его нет.
Вот он - github.com/ArduPilot/ardupilot/blob/…/hwdef.dat
И вот группировка выходов по таймерам. Более грамотная, чем у меня, надо сказать. Логика та же - на выходы с одним номером таймера (TIMx) нельзя назначить разные протоколы. Либо мотор, либо серва.
# Motors
PA0 TIM2_CH1 TIM2 PWM(1) GPIO(50)
PA1 TIM2_CH2 TIM2 PWM(2) GPIO(51)
PA2 TIM5_CH3 TIM5 PWM(3) GPIO(52)
PA3 TIM5_CH4 TIM5 PWM(4) GPIO(53)
PB0 TIM8_CH2N TIM8 PWM(5) GPIO(54)
PB1 TIM8_CH3N TIM8 PWM(6) GPIO(55)
PD12 TIM4_CH1 TIM4 PWM(7) GPIO(56)
PD13 TIM4_CH2 TIM4 PWM(8) GPIO(57)
PD14 TIM4_CH3 TIM4 PWM(9) GPIO(58)
PD15 TIM4_CH4 TIM4 PWM(10) GPIO(59)
PE5 TIM9_CH1 TIM9 PWM(11) GPIO(60) NODMA
PE6 TIM9_CH2 TIM9 PWM(12) GPIO(61) NODMA
PA8 TIM1_CH1 TIM1 PWM(13) GPIO(62) # for WS2812 LED
Вот тут это в явном виде сказано : ardupilot.org/…/common-matekf765-wing.html
Гляньте еще в MP параметр SERVO_RATE, там 50 Гц ?
SERVO_RATE: Servo default output rate
This sets the default output rate in Hz for all outputs.
Большое спасибо за ёмкий ответ. Серво рейт ( или как там произношение?) конечно гляну. Если не поможет то получается что исправить не получится по крайней мере в этой прошивке?
А как же серва которая должна в путевой точке включать например отцеп груза?
Да, там 50 герц в серво рейт
Да, там 50 герц в серво рейт
Ну серве минус точно нужен. И для питания, и для сигнала. На одном сигнале работать не будет. Ну и плюс питания конечно. Надо проверять все выходы.
Вы проверки, о которых писал ранее делали?
Ну и это поеятно что минус нужен))) я его взял с другого места. Но серва не двигается, хотя одникаторы на этом канале показывают движение зеленой полоской. Попробовал подключить сюда сигнальный провод с регуля, мотор тоже молчит.
Отсутствие земли на разъемах - что-то совсем странное. Как правило означает, что что-то сожжено. Или цоколевку напутали.
Моторы можно временно переключить в PWM параметром MOT_PWM_TYPE, см. ardupilot.org/copter/docs/parameters.html#mot-pwm-…
Да, плюс 5в на средних пинах не звонится с минусовыми пинами что рядом. Сжечь не мог, никаких косяков не было вроде ни при пайке, ни после. Лежит у ме6я другой такой же контроллер, но еще не впаяны разьемы. Он под самолет приготовлен, но придется его прошить и попробовать для сравнения.
и попробовать для сравнения.
Было бы неплохо.
Судя по картинке, линия питания серв Vx висит в воздухе. Ее надо запитывать от верхней платы или отдельного BEC. Сделано ?
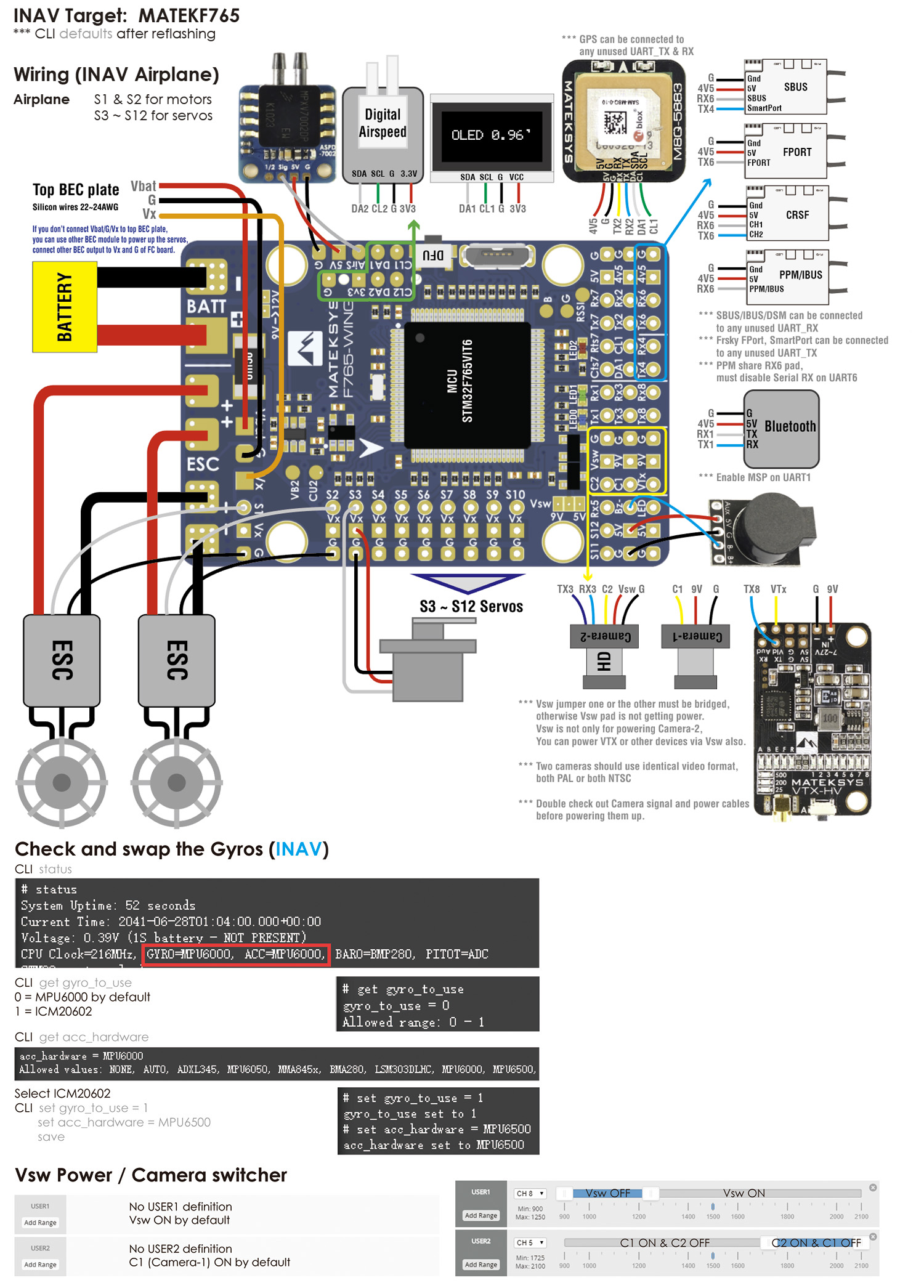
А с чего взято что линия вх в воздухе висит? Вернусь с работы попробую прозвонить их с массой верхней платы и с плюсом тоже, интересно, звонится или нет. Платы меж собой я спаял тремя проводками. Мож и правда отвалилось что пока я несколько раз верхнюю плату снимал. Действительно, ведь верхняя плата это и есть блок питания для серв. Или я ошибаюсь? Как странно, на неё идут три провода, а к ней ничего не подключено.
Взято с первого же взгляда на картинку и надписи вокруг нее. Похоже, я помогал отлаживать обесточенное устройство.
Я прошу прощения что ввел в заблуждение. Видимо у тестора не контачил щуп. Сейчас все перепроверил, масса есть, между собой прозваниваются все пины черного цвета, питание есть 5,68 вольт. На верхнюю плату приходит мои 4 банки, а с нее 5,68в. Серва молчит. Еще повторюсь что серв перепробовал кучу, все рабочие. Сам даже расстроился что причина не в обесточенном питании
Ветка что то приткхла, поэтому просто сообщу согласно предыдущего поста что сервы на сервоподвесе заработали путем другой прошивки, но дело было и не в ней. Просто на эти каналы надо было назначить крутилки и откалибровать их вместе со стиками и другими тумблерами, чего я не делал. Из-за этого сигнал был в суженном виде по середине диаппозона. Работают как при наклонах коптера, так и с крутилки одновременно.
Еще натерпелся с регулями. Тема не для регулей, но нельзя не упомянуть потому что все подозрения были на автопилот. Коптер мтпл просто отлично летать после настройки пидов, но как только напряжение (4банки) садилось до 13,8в коптер терял управление. В итоге оказалось что это уифровые гоночные регули не хотели крутить моторы с низким для них kv 610. Решилрсь путем долгих проб и ошибок с помощью программы настроек
для цифровых регулей Blhelisute. Отличные оказались регули. После этого пришлось немного смягчить пиды. Сецчас спокоцно стал летать даже на 3 банках до 8,5 вольт.