Wookong wk-m полетный контроллер от DJI

Спасибо, Сережа за подборку!😃
Хотя краткий облет крайней прошивки ничего, пока, плохого не выявил!
Но на всякий случай!😉
Всех соратников (пользователей Wookong - M)
С НОВЫМ 2013 ГОДОМ!!!
Удачных всем полетов и поменьше неясностей при эксплуатации фишки.
Вопрос по подключению iOSD.
Подключать к CAN-шине можно в любом месте или только в MC?
В инструкции показано только подключение к MC. В моем случае это не очень удобно - особенности рамы.
Всех соратников (пользователей Wookong - M) С НОВЫМ 2013 ГОДОМ!!! Удачных всем полетов и поменьше неясностей при эксплуатации фишки.
Спасибо и взаимно!
Хочу поздравить всех с наступающим, Новым 2013 годом! ![]()
Что бы количество взлетов, соответствовало количеству посадок! ![]()
размер 11 дюймов, проц i5 (рабочая частота 1.6-2.0Ггц в турбобоуст) время работы 4-5часов. Винт 256Гб SSD (ставил сам, так было 128) оперативка третья DDR3 4 Ггб.
И куды ся здесь айфонам??? Пальцами здесь тоже мОНа и нуна давить Вот это связка для нормальной работы с наземкой. Видео тянет в реальном времени с бортовой камеры и пишет его. Обработка - без проблем. Графика по винде 5.4 . . Вот только плат (модулей) внешних захвата видео достойных пока не встречал.
Подскажите что за модель? Кто производитель? Имею желание прикупить себе дня настроек в поле. Пока думаю между нетбуком и планшетом на винде.
Подскажите что за модель? Кто производитель? Имею желание прикупить себе дня настроек в поле. Пока думаю между нетбуком и планшетом на винде.
инфа была market.yandex.ru/model.xml?modelid=7777472&hid=642…
у меня для этих целей - market.yandex.ru/model.xml?modelid=8524249&hid=642…
Подключать к CAN-шине можно в любом месте или только в MC?
Если это действительно шина CAN - то без разницы куда подключаться. Модем работает, в какой бы его разъем не подключил
Тоже дошли руки до Вуконга 😎
Краткий отчет:
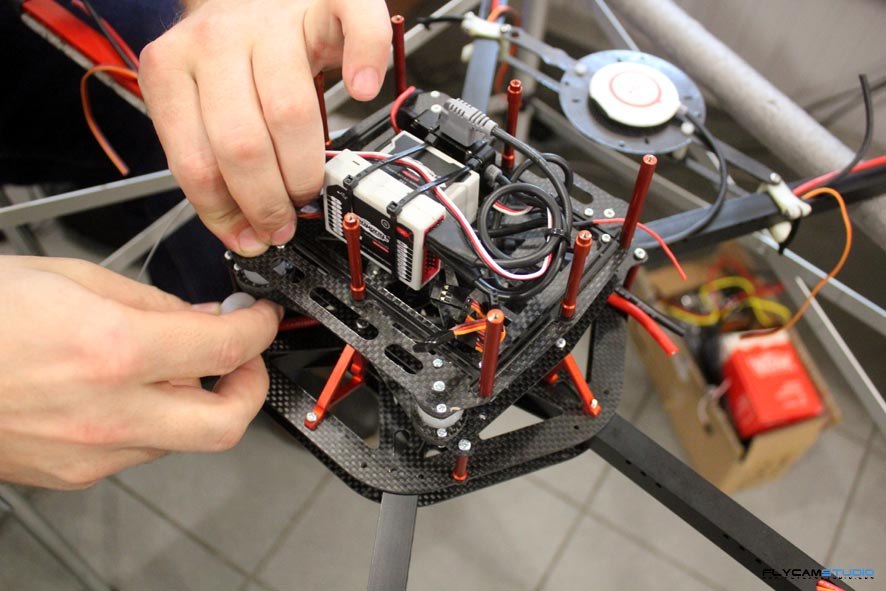
Сетап коптера:
Полетный контроллер: DJI Wookong-M+GPS
Регуляторы моторов: 60A RAPIDESC (by os-propo)
Безколлекторные двигатели: U28L Pulso 760kv (UAV Series)
Рама: TOP-MK10-6 Carbon (flycamstudio)
Пропеллеры: APC E13X6.5
Аппаратура управления: FUTABA T8FG Super
Разьемы: EC5
Батареи: 2х5800 4S
Подвес простенькая 2х осевая копия ORION H3 местной разработки.
При подключении серв к Вуконгу - они скоропостижно скончались (плохо читал рекомендации)
Оказалось что бек у них в комплекте за 1200$ - говно. Вешать на него нагрузку - не надо.
Что касается последнего пункта в меню настройки Voltage Protection Swich ON
программа выдает кучу ошибок, в том числе с предложением перекалибровать трансмиттер
PMU& Аккумулятор ERROR.
Коллега посоветовал отключить эту функцию, если на “фановом” коптере - ее можно и использовать, то на рабочем аппарате - необоснованный риск. (при некоректной настройке/жесткой просадке аккума, коптер с подвесом и камерой может захотеть сесть на дерево/дом/воду и т.д.)
Следующей проблемой обнаружился чрезмерно высокий уровень газа при старте. Ну очень высокий, хотя програмно он выставлен на минимум. Мыслей кроме как допилить уровень в газа в регуляторе подключив к СС и откалибровать серез ГУИ ОупенПилота не нашлось… В ГУИ к Вуконгу регуль тоже можно настраивать, но в диапазоне 1144-1208 мкс, причем есть только 3 варианта: Low, Recommend и High.
А в прошивке СИМОНКА которую мы используем Min Gas 1060 мкс, поэтому на 4S получается “пистолетный” старт и motor stall.
Мой напарник Сергей с помощью CC передвинул нижнюю границу старта мотора в регулях точно на 1125 мкс, при 1144 мкс вуконговского “Low” моторы плавненько крутятся. Есть куча других способов это сделать, но мы предпочитаем точный и однозначные джидайские методы.
Одним словом, недоработка софта, вернее, его заточенность под “домохозяек” на каждом шагу.

Подведя итоги - потратив неделю (или больше) на сборку этого коптера мы разобрались с вражеской электроникой от ДЖИ, получили практический опыт настройки, это была хорошая возможность провести тесты, сравнив и сопоставив как работает Вуконг на нашей раме в сравнении с другими полетными контроллерами которые мы используем.
Что понравилось:
- Удержание по GPS и высоте - очень четко держит.
- Калибровка компаса - удобно и просто.
Что не понравилось:
- Отдельный бек. Я так понимаю, он большие сервы не тянет, нафиг тогда нужна отдельная коробка?
- Настройки Min Gas. Это китайцы отожгли,
- Стабилизация. Как не крути, немец (он у нас очень хорошо отстроен) летает куда лучше, главным образом из-за гибкости контроллера - почти все параметры в Gyro перенастраивались. Здесь по сути только два гейна (Basic и Attitude), их возможностей не хватает. Еще не нравится отработка рудера, в МК мы настроили “вертолетный” руддер с очень четкой отработкой без лишних движений, а здесь сопля в тесте или перекомпенсация .
- Красный глаз. Для настройки он информативный, но просадку напряжения по нему смотреть неприкольно.
помидорка за бек
При подключении серв к Вуконгу - они скоропостижно скончались (плохо читал рекомендации)
Оказалось что бек у них в комплекте за 1200$ - говно. Вешать на него нагрузку - не надо.
писалось и не раз , даже в инструкции написано что не вешать ничего на него кроме допов вуконга !!!
Что касается последнего пункта в меню настройки Voltage Protection Swich ON
программа выдает кучу ошибок, в том числе с предложением перекалибровать трансмиттер
PMU& Аккумулятор ERROR.
- причина в неправильном подключении бека, 2. не вошли в систему под логином ( бывало такое ), 3. выключена аппа
Следующей проблемой обнаружился чрезмерно высокий уровень газа при старте. Ну очень высокий, хотя програмно он выставлен на минимум. Мыслей кроме как допилить уровень в газа в регуляторе подключив к СС и откалибровать серез ГУИ ОупенПилота не нашлось… В ГУИ к Вуконгу регуль тоже можно настраивать, но в диапазоне 1144-1208 мкс, причем есть только 3 варианта: Low, Recommend и High.
А в прошивке СИМОНКА которую мы используем Min Gas 1060 мкс, поэтому на 4S получается “пистолетный” старт и motor stall.
Мой напарник Сергей с помощью CC передвинул нижнюю границу старта мотора в регулях точно на 1125 мкс, при 1144 мкс вуконговского “Low” моторы плавненько крутятся. Есть куча других способов это сделать, но мы предпочитаем точный и однозначные джидайские методы.
не вижу здесь проблемы вуконга , ХЗ что вы зашиваете в реги
Стабилизация. Как не крути, немец (он у нас очень хорошо отстроен) летает куда лучше, главным образом из-за гибкости контроллера - почти все параметры в Gyro перенастраивались. Здесь по сути только два гейна (Basic и Attitude), их возможностей не хватает. Еще не нравится отработка рудера, в МК мы настроили “вертолетный” руддер с очень четкой отработкой без лишних движений, а здесь сопля в тесте или перекомпенсация .
вы реально перемудрили со своей рамой , ИМУ должен быть закреплен на раме у него свой просчитанный демпфер , у вас двойное демпфирование - получите сопли со стабилизацией и рудером (+ ко всему недогруженный аппарат (МК с этим хорошо справляется)) Какая чуйка у вас сейчас по питч-ролл , киньте скриншот настроек посмотреть. совет кстати поднять жпс выше линии моторов , а то можно будет удивится.
Как не крути, немец (он у нас очень хорошо отстроен) летает куда лучше
я вам немца вы мне вуконг ?? 8)))))
Спасибо Владимир за полезные каменты! Вуконга мы отдали, перекрестились и решили больше не связываться.
Мы специализируемся на МК, как проверенном годами контроллере с “неподмоченной” репутацией - под него и спроектирована рама, однако систему виброразвязки можно зажать в ноль, дело не в ней 100%, мы рассматривали этот вариант. ЖПС и центр масс конечно же в программе выставили при настройке. А с бек как получилось - сам в шоке!
Что касается полетных качеств платформы(без использования рюшечек) - то я еще ни одного тяжелого Вуконга летающего на уровне МК не видел.
Андрей, в чужой монастырь…
Пока на соседнем форуме Вы обсерали вуконг и хвалили СС и МК, здесь люди добились неплохих результатов, поэтому прочтите ветку от начала до конца, а потом делайте выводы;)
Пропеллеры: APC E13X6.5
Уже только вот это создает проблему на U28
Вуконга мы отдали, перекрестились и решили больше не связываться.
Вы любите кошек??? Просто нужно уметь их готовить…
И нет идеального аппарата пока. Каждый находит более близкое к своим задачам, требованиям и целям.
Мы специализируемся на МК
Здесь и ответ на все вопросы и притезии. Для МК какбы есть своя ветка
С прошлого года перешел с МК на Вуконг!
Очень доволен системой!
Возвращаться к МК нет ни малейшего желания!
По крайней мере, пока!
P.S.
Отдельное спасибо Александру(delfin000) за консультации.
Немного фото:
Вуконга мы отдали, перекрестились и решили больше не связываться.
По описанию и фотографиям становится очевидно, что инструкция не читалась даже мельком. С таким подходом лучше вообще не связываться с полетами 😕
Пропеллеры: APC E13X6.5
давайте срау 18х10 ставьте, а потом начинайте визжать на весь инет, что аппарат не летает. Думаем сначала головой, а не обувью, читая ветку по настройкам и рекомендации, а не так из серии “что есть, то и ставим”.
U28 + 13х65 как бы рабочий вариант ,НО если реги медленные и большой размах летать она будет плохо так как стабилизация не будет успевать отрабатывать , второе НО если недогрузить аппарат на вуконге то он также будет неадекватный по стабилизации ( МК как то с этим справляется лучше ) согласитесь маразм если летать на аппарате весом 2.5-3кг а тяги у мего 12 кг
Сегодня закончилась эпопея с перепрошивкой GPS модуля. Полтора месяца полз он в Китай. Письма, звонки, ругань, заявления в службу претензий и т.д. ну, в общем наша славная EMS почта. И неделю обратно FedEx-ом ехало. Сегодня пойду тестить что и как работает на новом модуле. 😃
А где посмотреть changelog прошивок?
Вчера на последней проше словили глюк. Отлетали минут 6ть, Atti, GPS - ноу проблем, потом начало немного тащить в левую сторону + по рудеру не адекват был. Gain были в районе 125. Сели, попробовали снова взлететь - завал на левую сторону и переворот. Регули AE-45 проша- BLHeli, моторки Тмоторс 2820.
С таким подходом лучше вообще не связываться с полетами
А подход простой - во все что есть суём ОР СС. Удивляемся что работает/летает не так как привычный ОР СС = обсираем.
"Зачем читать мануалы? Это не для нас… Мы даже после крэша не читаем 😉 Крэши стараемся устраивать побольше и подороже - Марк 2 с оптикой например уронить. Это наше 😉 "
Кстати прошивка в регуляторах изначально Симонковская! “Рапид” всего лишь ребрендинг.
Если это действительно шина CAN - то без разницы куда подключаться. Модем работает, в какой бы его разъем не подключил
Конечно странно, но iOSD работает только при подключении в CAN-разъем PMU (как и сказано в инструкции). А я хотел как лучше 😉
Вчера на последней проше словили глюк. Отлетали минут 6ть, Atti, GPS - ноу проблем, потом начало немного тащить в левую сторону + по рудеру не адекват был. Gain были в районе 125. Сели, попробовали снова взлететь - завал на левую сторону и переворот. Регули AE-45 проша- BLHeli, моторки Тмоторс 2820.
А как мигал при этом? Обратили внимание?