Интелектуальный , умный и независимый подвес камеры? Реально!

Меня интересует более приземлённый вариант.Возможно ли использовать Вашу разработку в этой конструкции вместо двух звеньевой механической руки.Для компенсации вертикальных колебаний.
www.youtube.com/watch?v=3dpS_qxNTDc
\\\ Спасибо.
Использовать можно. Я пока не готов сказать, когда будет коммерческое решение для таких девайсов.
Сам именно такой девайс теперь и проектирую. Хотя, не совсем такой. На вашем примере есть странности:
Во первых сказано про 5 осей, но осей только три.
Во-вторых последовательность осей стабилизации не правильная.
На этом примере поворачивая камеру вниз, ось стабилизации бокового крена пропадает и остается только две оси.
Когда говорят о четырех или пяти осях, то имеется ввиду устранение проблемы “gimbal lock” , по русски, видимо - блокировка кардана. У этих ребят блокировка кардана лишь усугубляется неверной очередностью осей.
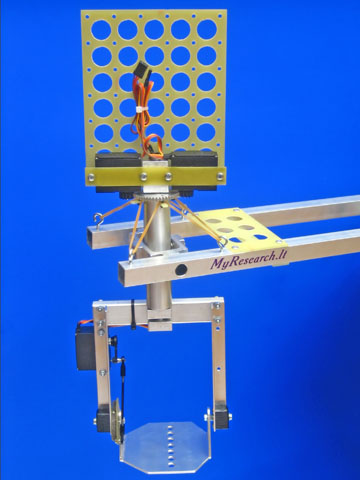
Вот мой давний пример с четырьмя осями. Если добывать ось для “декоративного” наклона вбок, то будет пять осей. И проблемы Gimbal lock нету и направляй куда-угодно. Только на оси выравнивания теперь F-servo ставить вместо резинок и двойного сервопривода сверху.
Здесь на риге почти аналогичная последовательность расположения осей \\\ photoshipone.com/phoenix-brushless-drive-gimbals/ \\\ За две остальные оси в приведённом примере видно считают механическую руку.
Здесь на риге почти аналогичная последовательность расположения осей \\\ photoshipone.com/phoenix-brushless-drive-gimbals/ \\\ За две остальные оси в приведённом примере видно считают механическую руку.
Ребят из photoshipone я тролил по поводу очередности осей несколько лет назад, когда они стали повторять популярное тогда решение с замкнутым кольцом вращения вокруг камеры. Теперь это можно вспоминать как пример изменчивой моды на популярные решения для стабилизации камеры 😃
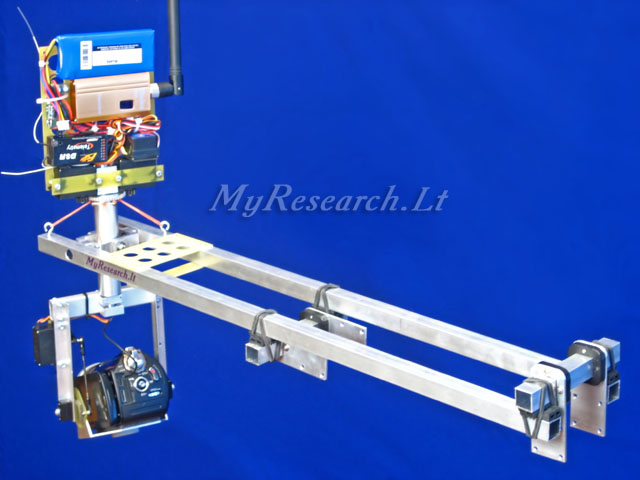
Это еще один тест стабилизируемой платформы для камеры.
Вращаемая масса - 10кг.
Force Servo + контроллер ZYX-GS V1.2.
Повторяемость позиции - 10 минут.
При раскачивании основы отклонения платформы находились в пределах 1 градуса.
Шумы на уровне 1 секунды.
Совершенствование продолжается.
Всего за несколько дней точность работы прототипа была улучшена на порядок. А на январь анонсирована демонстрация полноценного подвеса для видеокамеры. (Видео прежнего теста заменено)
анонсирована демонстрация полноценного подвеса для видеокамеры.
Алексей, где и конкретно когда это будет происходить?
Алексей, где и конкретно когда это будет происходить?
Планирую просто выпустить видео. А по мероприятиям и выставкам пока еще плана нет.
Планирую просто выпустить видео
А мы уже жребий предновогодний чуть не розыграли , бумажки накрутили - кому ехать:)
еще плана нет.
А зря. Работы ваши интересные и многообещающие. до сих пор часто сервоподвесы ставим, когда полет.время в узкие рамки вес загоняет
Пружины, это бюджетно и наглядно, но не лучшее в данном случае.
Если бы нам всем знать, где и в чем это самое точное, прочное, надежное, оптимальное, а значит и самое лучшее. Спираль эволюций такого не знает. Следовательно, решений будет еще тьма. И каждому из них свое время.
Сделал наглядное сравнение по крутящему моменту для сервопривода силы и прямого бесколлекторного привода. Просто более доходчивая форма, нежели на словах:
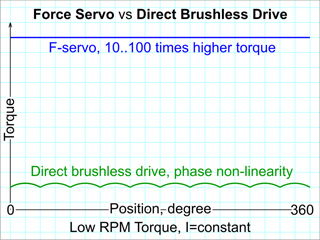
Суть в более высокой энергетической эффективности при меньшем весе и размере, а так же отсутствие нелинейности.
а так же отсутствие нелинейности.
А нелинейность и усталость пружин?
А нелинейность и усталость пружин?
- У меня несколько прототипов и пружины - не единственный вариант.
- Нелинейность при изменении плеча воздействия пружины не связана с цикличностью, как это есть в прямом приводе.
- Нелинейность в муфте компенсируется линеаризацией в контроллере, и при этом положение платформы относительно основы не имеет значения.
- Если вы вспомнили об усталости пружин, то надо вспомнить о размагничивании магнитов в бесколлекторнике и об изменении параметров при нагревании обмоток.
А линейность по растяжению или сжатию обычной пружины как раз сохраняется, там для расчета используется линейная функция N/mm.
Сделал наглядное сравнение по крутящему моменту для сервопривода силы и прямого бесколлекторного привода.
Интересно как с такими пульсациями крутящего, БК привод движется плавно и без рывков и без массы как у Вас 10кг которая сильно стабилизирует, на видео всё бы всплыло, похоже гарфик не от этих моторов. Да и результаты пока в пользу БК привода.
то надо вспомнить о размагничивании магнитов в бесколлекторнике
Не знаю о каких магнитах речь, годами лежат и работают без потери свойств.
об изменении параметров при нагревании обмоток
А у Вас сервы без магнитов и обмоток?
Что то я в продаже не встречал Force Servo
Они хоть в продаже то есть ???
Да и результаты пока в пользу БК привода.
Какое именно сравнение вы имели ввиду? Количество проданных единиц или все таки технические параметры прототипов?
Не знаю о каких магнитах речь, годами лежат и работают без потери свойств.
Не спорю, так это и было сравнение с пружинами и иными упругими элементами, которые так же служат годами.
Они хоть в продаже то есть ???
Нет. Это демонстрация прототипов. Прототип для серийного производства будет опробован в феврале и позже запущен в серию. Таков план.
Интересно как с такими пульсациями крутящего, БК привод движется плавно и без рывков и без массы как у Вас 10кг которая сильно стабилизирует, на видео всё бы всплыло, похоже гарфик не от этих моторов.
Учим матан. Если на коммерческой основе поставят задачу крутить камеру массой 10 грамм таким способом - сделаем. Не важен масштаб, важна точность механики (для микрокамеры механика будет как у механических наручных часов). Это решение не имеет дискретизации в определении позиции относительно нестабильной основы.
Возьмите ваш нынешний подвес с бесколлекторниками примотайте к камере лазерную указку и посмотрите, будет ли с 10 метров попадать в десяточку тировой мишени. Чтобы линейные колебания рук проявлялись не так сильно, можно увеличить мишень в 10 раз и отойти не на 10, а на 100 метров. В принципе, с бесколлекторником этого тоже возможно добиться, но я уже добился с F-Servo и по организации обратных связей с F-Servo это делается проще.
Если хотите наглядно видеть фазовую нелинейность бесколлекторника, то подключите его в режиме генератора через выпрямитель и с небольшой электрической нагрузкой к осцилографу.
А у Вас сервы без магнитов и обмоток?
У нас сервы больше тока преобразуют во вращение и меньше на нагрев.
Еще раз о линейности. У бесколлекторника тяга условно пропорциональна току с поправкой на фазы и на силу трения. У сервопривода силы (F-servo) есть фактическая обратная связь.
И еще раз отмечу, что механические наручные часы ходят с такой же точностью, как часы на городской башне, хотя массы маятников сильно отличаются. Т.е. механическое решение масштабируется.
Нет. Это демонстрация прототипов. Прототип для серийного производства будет опробован в феврале и позже запущен в серию. Таков план.
.
В какой комплектации будет производится Force Cervo : (серва,контроллер и … )??? .
В какой комплектации будет производится Force Cervo : (серва,контроллер и … )??? .
План сделать серву, аналогичную обычной. Ее можно подключить прямо к приемнику, сервотестеру, гироскопу, контроллеру подвеса. Проектирую вариант с такой осью, на которую можно сажать подвес без дополнительного звена. То есть что бы собственная ось привода выдерживала нагрузку подвеса.
Проектирую вариант с такой осью, на которую можно сажать подвес без дополнительного звена. То есть что бы собственная ось привода выдерживала нагрузку подвеса.
Это уже интересно,Ждем-с данный вариант.Как будет выглядеть управление данной сервой: контроллер ,своя программа для него,обратная связь… ??? .
Это уже интересно,Ждем-с данный вариант.Как будет выглядеть управление данной сервой: контроллер ,своя программа для него,обратная связь… ??? .
Подходящие контроллеры уже есть, например - ZYX-GS.
Вот три примера конфигурации :