Интелектуальный , умный и независимый подвес камеры? Реально!

Сделал наглядное сравнение по крутящему моменту для сервопривода силы и прямого бесколлекторного привода. Просто более доходчивая форма, нежели на словах:
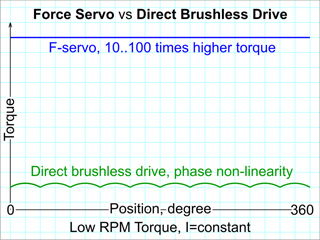
Суть в более высокой энергетической эффективности при меньшем весе и размере, а так же отсутствие нелинейности.
а так же отсутствие нелинейности.
А нелинейность и усталость пружин?
А нелинейность и усталость пружин?
- У меня несколько прототипов и пружины - не единственный вариант.
- Нелинейность при изменении плеча воздействия пружины не связана с цикличностью, как это есть в прямом приводе.
- Нелинейность в муфте компенсируется линеаризацией в контроллере, и при этом положение платформы относительно основы не имеет значения.
- Если вы вспомнили об усталости пружин, то надо вспомнить о размагничивании магнитов в бесколлекторнике и об изменении параметров при нагревании обмоток.
А линейность по растяжению или сжатию обычной пружины как раз сохраняется, там для расчета используется линейная функция N/mm.
Сделал наглядное сравнение по крутящему моменту для сервопривода силы и прямого бесколлекторного привода.
Интересно как с такими пульсациями крутящего, БК привод движется плавно и без рывков и без массы как у Вас 10кг которая сильно стабилизирует, на видео всё бы всплыло, похоже гарфик не от этих моторов. Да и результаты пока в пользу БК привода.
то надо вспомнить о размагничивании магнитов в бесколлекторнике
Не знаю о каких магнитах речь, годами лежат и работают без потери свойств.
об изменении параметров при нагревании обмоток
А у Вас сервы без магнитов и обмоток?
Что то я в продаже не встречал Force Servo
Они хоть в продаже то есть ???
Да и результаты пока в пользу БК привода.
Какое именно сравнение вы имели ввиду? Количество проданных единиц или все таки технические параметры прототипов?
Не знаю о каких магнитах речь, годами лежат и работают без потери свойств.
Не спорю, так это и было сравнение с пружинами и иными упругими элементами, которые так же служат годами.
Они хоть в продаже то есть ???
Нет. Это демонстрация прототипов. Прототип для серийного производства будет опробован в феврале и позже запущен в серию. Таков план.
Интересно как с такими пульсациями крутящего, БК привод движется плавно и без рывков и без массы как у Вас 10кг которая сильно стабилизирует, на видео всё бы всплыло, похоже гарфик не от этих моторов.
Учим матан. Если на коммерческой основе поставят задачу крутить камеру массой 10 грамм таким способом - сделаем. Не важен масштаб, важна точность механики (для микрокамеры механика будет как у механических наручных часов). Это решение не имеет дискретизации в определении позиции относительно нестабильной основы.
Возьмите ваш нынешний подвес с бесколлекторниками примотайте к камере лазерную указку и посмотрите, будет ли с 10 метров попадать в десяточку тировой мишени. Чтобы линейные колебания рук проявлялись не так сильно, можно увеличить мишень в 10 раз и отойти не на 10, а на 100 метров. В принципе, с бесколлекторником этого тоже возможно добиться, но я уже добился с F-Servo и по организации обратных связей с F-Servo это делается проще.
Если хотите наглядно видеть фазовую нелинейность бесколлекторника, то подключите его в режиме генератора через выпрямитель и с небольшой электрической нагрузкой к осцилографу.
А у Вас сервы без магнитов и обмоток?
У нас сервы больше тока преобразуют во вращение и меньше на нагрев.
Еще раз о линейности. У бесколлекторника тяга условно пропорциональна току с поправкой на фазы и на силу трения. У сервопривода силы (F-servo) есть фактическая обратная связь.
И еще раз отмечу, что механические наручные часы ходят с такой же точностью, как часы на городской башне, хотя массы маятников сильно отличаются. Т.е. механическое решение масштабируется.
Нет. Это демонстрация прототипов. Прототип для серийного производства будет опробован в феврале и позже запущен в серию. Таков план.
.
В какой комплектации будет производится Force Cervo : (серва,контроллер и … )??? .
В какой комплектации будет производится Force Cervo : (серва,контроллер и … )??? .
План сделать серву, аналогичную обычной. Ее можно подключить прямо к приемнику, сервотестеру, гироскопу, контроллеру подвеса. Проектирую вариант с такой осью, на которую можно сажать подвес без дополнительного звена. То есть что бы собственная ось привода выдерживала нагрузку подвеса.
Проектирую вариант с такой осью, на которую можно сажать подвес без дополнительного звена. То есть что бы собственная ось привода выдерживала нагрузку подвеса.
Это уже интересно,Ждем-с данный вариант.Как будет выглядеть управление данной сервой: контроллер ,своя программа для него,обратная связь… ??? .
Это уже интересно,Ждем-с данный вариант.Как будет выглядеть управление данной сервой: контроллер ,своя программа для него,обратная связь… ??? .
Подходящие контроллеры уже есть, например - ZYX-GS.
Вот три примера конфигурации :
Для летающих платформ всё понятно,а как у Вас обстоит работа с более приземлённым вариантом (пост№ 960).
Для летающих платформ всё понятно,а как у Вас обстоит работа с более приземлённым вариантом (пост№ 960).
Такую версию именно сейчас и собираю. Но это будет весьма дорогой образец, смысл которого в том, что бы поколебать рынок “профессиональной” техники.
З.Ы. Вобщето, меня тошнит от таких выражений, как : профессиональная …, премиум класс, экстра-уровень и т.п.
Хотя такие приставки очень любят покупатели в Москве и производители в Китае 😃
Интересно как вы решите стабилизацию третьей оси. Ведь там уже не будет такого “помощника” в виде высокого момента инерции (или придется разносить два груза-противовеса, что повысит габариты устройства)
Такую версию именно сейчас и собираю. Но это будет весьма дорогой образец, смысл которого в том, что бы поколебать рынок “профессиональной” техники.
Вот это уже интересно!,и когда мы увидим рабочий макет.Ведь доводка до готового образца - процесс весьма длительный.Спасибо.
Интересно как вы решите стабилизацию третьей оси.
Присоединяюсь к вопросу от Алексея.Весьма интересный вопрос для “профессиональной” техники.
Вот это уже интересно!,и когда мы увидим рабочий макет.Ведь доводка до готового образца - процесс весьма длительный.Спасибо.
Если получу компоненты вовремя, то через неделю-две все будет работать. Если работать сразу будет красиво, то покажу быстро.
Интересно как вы решите стабилизацию третьей оси. Ведь там уже не будет такого “помощника” в виде высокого момента инерции (или придется разносить два груза-противовеса, что повысит габариты устройства)
Наличие вынесенного противовеса повышает стабильность, но это не обязательно. Я скорее решаю задачу по демонстрации возможностей в разных компановках. Можно смело копировать компановку FlyCam и иметь четырех и даже пяти-осный вариант для полного счастья. А где важна компактность, там можно не использовать противовес, а делать привычный двух- или тре-осник.
Из существующих примеров с разнесением грузов буквой “Т” - Ecilop Stereo:

Хотя на этом аппарате нету третьей оси стабилизации камеры, но если бы она была, то грузы по горизонтали разнесены.
Можно буквой Т разнести две батареи сверху, а одну камеру вынести в низ. Ну и прочие варианты. Можно и механический гироскоп добавить.
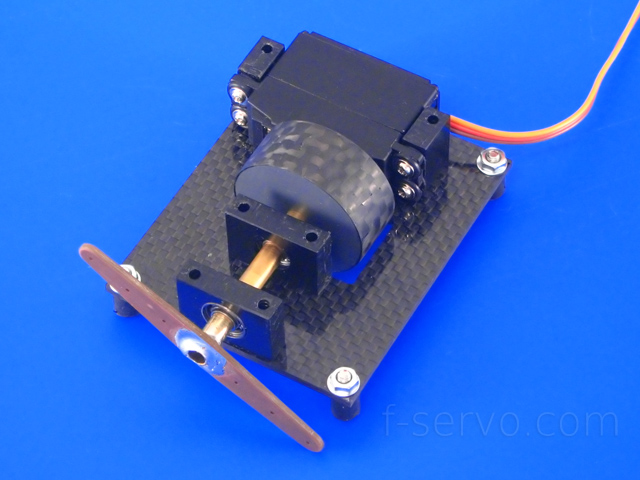
Девятый прототип F-servo c KnowHow муфтой. Возможно, что именно эта муфтра и пойдет в серийные варианты, но это еще займет время. Увеличена скорость мотора/редуктора для данного прототипа.
Результат:
момент - до 2кг*см
скорость - до 4000градусов в секунду (в два раза выше, чем возможности датчиков в контроллерах подвесов)
потребление - до 5Вт
Уровень механического шума в 100 раз ниже, чем у прямого привода (примерное сравнение - два порядка)
циклическое вращение
скоро выложу видео с регистрацией параметров.
А можно по подробнее о системе RoControl .Спасибо.
Уровень механического шума в 100 раз ниже, чем у прямого привода (примерное сравнение - два порядка)
Прямой привод, это серво или БК?
Прямой привод, это серво или БК?
БК я испытывал, но не занимаюсь.
В RoControl Pointer-1, конечно же, F-Servo.
Пока механическая точность выше, чем точность контроллеров с акселерометрами, потому в примере с мишенью был применен оптический маркер.
К сожалению, у меня не было более тяжелой камеры, чем Mark-II c объективом 420мм (это телеобъектив).
Это немного серьезнее, чем сдэдикам для съемки с близи или с широким углом.
Иногда надо с борта яхты снять крупным планом маяк на берегу.
Ну или снимать с безопасного растояния работу людей, которые делают на столько полезные вещи, что бояться быть опознаными (на службе каждого государства такие есть) 😃
Максимальная нагрузка до 10кг. Осевой блок, рама и сервы весят 1200г, корпус - еще 500г. Противовес - батарея.
Хотел выложить всю информацию к 24 числу, но были задержки с поставкими и одна ось еще барахлит (осей - три). Скоро доделаю и буду демонстрировать.

Скоро доделаю и буду демонстрировать.
Ждем с нетерпением.