Интелектуальный , умный и независимый подвес камеры? Реально!

Интересно как вы решите стабилизацию третьей оси. Ведь там уже не будет такого “помощника” в виде высокого момента инерции (или придется разносить два груза-противовеса, что повысит габариты устройства)
Такую версию именно сейчас и собираю. Но это будет весьма дорогой образец, смысл которого в том, что бы поколебать рынок “профессиональной” техники.
Вот это уже интересно!,и когда мы увидим рабочий макет.Ведь доводка до готового образца - процесс весьма длительный.Спасибо.
Интересно как вы решите стабилизацию третьей оси.
Присоединяюсь к вопросу от Алексея.Весьма интересный вопрос для “профессиональной” техники.
Вот это уже интересно!,и когда мы увидим рабочий макет.Ведь доводка до готового образца - процесс весьма длительный.Спасибо.
Если получу компоненты вовремя, то через неделю-две все будет работать. Если работать сразу будет красиво, то покажу быстро.
Интересно как вы решите стабилизацию третьей оси. Ведь там уже не будет такого “помощника” в виде высокого момента инерции (или придется разносить два груза-противовеса, что повысит габариты устройства)
Наличие вынесенного противовеса повышает стабильность, но это не обязательно. Я скорее решаю задачу по демонстрации возможностей в разных компановках. Можно смело копировать компановку FlyCam и иметь четырех и даже пяти-осный вариант для полного счастья. А где важна компактность, там можно не использовать противовес, а делать привычный двух- или тре-осник.
Из существующих примеров с разнесением грузов буквой “Т” - Ecilop Stereo:

Хотя на этом аппарате нету третьей оси стабилизации камеры, но если бы она была, то грузы по горизонтали разнесены.
Можно буквой Т разнести две батареи сверху, а одну камеру вынести в низ. Ну и прочие варианты. Можно и механический гироскоп добавить.
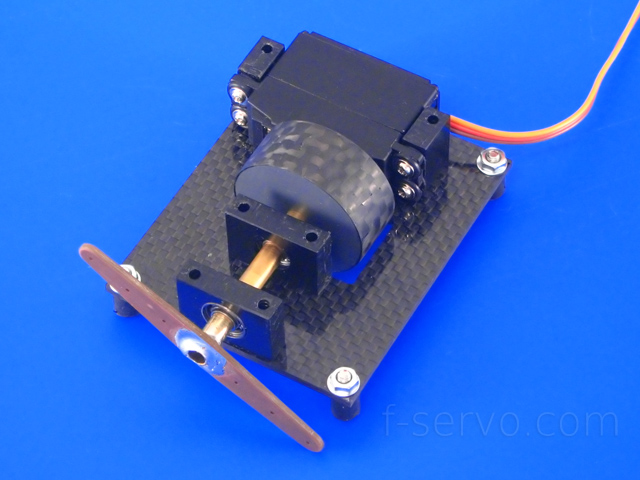
Девятый прототип F-servo c KnowHow муфтой. Возможно, что именно эта муфтра и пойдет в серийные варианты, но это еще займет время. Увеличена скорость мотора/редуктора для данного прототипа.
Результат:
момент - до 2кг*см
скорость - до 4000градусов в секунду (в два раза выше, чем возможности датчиков в контроллерах подвесов)
потребление - до 5Вт
Уровень механического шума в 100 раз ниже, чем у прямого привода (примерное сравнение - два порядка)
циклическое вращение
скоро выложу видео с регистрацией параметров.
А можно по подробнее о системе RoControl .Спасибо.
Уровень механического шума в 100 раз ниже, чем у прямого привода (примерное сравнение - два порядка)
Прямой привод, это серво или БК?
Прямой привод, это серво или БК?
БК я испытывал, но не занимаюсь.
В RoControl Pointer-1, конечно же, F-Servo.
Пока механическая точность выше, чем точность контроллеров с акселерометрами, потому в примере с мишенью был применен оптический маркер.
К сожалению, у меня не было более тяжелой камеры, чем Mark-II c объективом 420мм (это телеобъектив).
Это немного серьезнее, чем сдэдикам для съемки с близи или с широким углом.
Иногда надо с борта яхты снять крупным планом маяк на берегу.
Ну или снимать с безопасного растояния работу людей, которые делают на столько полезные вещи, что бояться быть опознаными (на службе каждого государства такие есть) 😃
Максимальная нагрузка до 10кг. Осевой блок, рама и сервы весят 1200г, корпус - еще 500г. Противовес - батарея.
Хотел выложить всю информацию к 24 числу, но были задержки с поставкими и одна ось еще барахлит (осей - три). Скоро доделаю и буду демонстрировать.

Скоро доделаю и буду демонстрировать.
Ждем с нетерпением.
Конструкция “засекречена” защитным кожухом?.
Конструкция “засекречена” защитным кожухом?.
Как показала практика, друзья из Китая не умеют копировать технологии по описанию, им нужен образец для копирования с идентичными параметрами. Оформляются еще два патента на отдельные элементы…
Когда это пойдет в продажу, то тайн уже не будет. Некоторые параметры улучшаться еще, например планируется повышение “битности” измерения усилия.
Скорость 4000 градусов/секунду я сделал только для того, что бы показать, что F-Servo может работать быстрее, чем датчики в контроллерах. В серийных вариантах такая скорость не планируется, она на порядок черезмерна.
скорость - до 4000градусов в секунду
Эта скорость измерялась в холостом режиме или при 2кг/см и сколько мог бы весить Ваш привод при 50кг/см?
Эта скорость измерялась в холостом режиме или при 2кг/см и сколько мог бы весить Ваш привод при 50кг/см?
2кг*см - это максимум в этом варианте.
Если нужна примерная масса для 50кг*см, то посмотрите массы серв с таким моментом и добавьте еще 50% на массу муфты.
Вопрос был про скорость “до 4000градусов в секунду”, повторю вопрос, эта скорость измерялась в холостом режиме или при максимальных 2кг/см ?
Если нужна примерная масса для 50кг*см, то посмотрите массы серв с таким моментом и добавьте еще 50% на массу муфты.
А скорость будет такая же как и двух килограммовой? Что произойдёт с муфтой при превышении крутящего?
Вопрос был про скорость “до 4000градусов в секунду”, повторю вопрос, эта скорость измерялась в холостом режиме или при максимальных 2кг/см ?
А скорость будет такая же как и двух килограммовой? Что произойдёт с муфтой при превышении крутящего?
Скорость зависит от мотора и редуктора. передаточное число редуктора может быть от 1 до 1000. Таким образом можно подобрать оптимум. У прямого привода до оптимума далеко.
На 9 прототипе в муфте есть датчик и более 2кг*см электроника не позволит сделать. А максимальный момент с редуктора при заклинивании 2,4кг*см.
На высоких оборотах не нужен высокий крутящий момент. Высокая скорость нужна, что бы подстроиться под колебания нестабильной основы, а подвес остается на месте по инерции и на такую операцию не требуется высокий ток. Высокая нагрузка возникает при умышленном вращении или сильном дисбалансе.
У прямого привода до оптимума далеко.
Это мнение глубоко ошибочно, если о чём то не знаешь, то это не факт что этого нет.
корость зависит от мотора и редуктора. передаточное число редуктора может быть от 1 до 1000. Таким образом можно подобрать оптимум.
У такого типа редуктора минусов то же достаточно.
Это мнение глубоко ошибочно, если о чём то не знаешь, то это не факт что этого нет.
У такого типа редуктора минусов то же достаточно.
Полностью с вами согласен. Если сами не попробовали, то это не знание, а вера.
КПД бесколлекторных двигателей (или в данном случае лучше говорить о линейном двигателе так как обороты блики к 0) - это предмет хорошо описанный как теоретически так и изучен практически. Были образцы станков с линейным приводом подвижного стола, и прочие применения, но не пошло, так как не эффективно. Есть поезда с подобным приводом, но там есть короткий разгон с низкой эффективностью и потом продолжительная дорога с высокой. А для подвеса камеры - 100% времени не эффективная работа, так как не возникают скорости вращения эффективной работы.
У кого аппарат летает на ардуино - просто посмотри лог файл обычного полета, там угловые ускорения полностью укладываются в возможности редукторных серв.
Минусов много во всем, что работает не на волшебстве. Выбираем лучшее.
Полностью с вами согласен. Если сами не попробовали, то это не знание, а вера. КПД бесколлекторных двигателей (или в данном случае лучше говорить о линейном двигателе так как обороты блики к 0) - это предмет хорошо описанный как теоретически так и изучен практически.
Вот мои слова и подтвердились, я не сомневался в Вашем знании теории БК приводов, просто Вы не в курсе последних достижений в этой области, современные муфты и редукторы то же сильно отличаются от применяемых у Вас.
Вот мои слова и подтвердились, я не сомневался в Вашем знании теории БК приводов, просто Вы не в курсе последних достижений в этой области, современные муфты и редукторы то же сильно отличаются от применяемых у Вас.
Я бы рад ознакомиться, но о чем речь? я пока вижу классический линейный двигатель во всех популярных подвесах прямого привода.
По редукторам и муфтам старался прошерстить тему… пока результаты постоянно улучшаются и есть идеи на следующие прототипы.
По первым прототипам - была ключевая задача - проверить и продемонстрировать.
Теперь начинается следующий этап - гонка за техническими параметрами.
Вот интересный обзор по приводам dcx.maxonmotor.com/…/brochure_X_drives_2013_e_web.… \\\ dcx.maxonmotor.com/maxon-dcx/eng/overview.jsp#.Uua… взято здесь www.maxonmotor.com.au/maxon/…/PHOTOHIGHER-AB
По редукторам и муфтам старался прошерстить тему…
Может приглядеться к магнитной порошковой муфте.
Может приглядеться к магнитной порошковой муфте.
Как обнаружилось, у сервопривода сылы много потенциальных применений, и где-то это может быть актуально. Благодарю.
Вот интересный обзор по приводам
Махон - вроде бы серьезная компания, а вот Photohigher у меня вызывает сильное раздражение. Имея в виду их неудачную попытку повторить достаточно простой механизм пиротехнического выброса парашюта, а так же провальные анонсы выпуска копий технических решений еще некоторых компаний. Карбоновые понты вместо матана 😃
Честно говоря, я в 90% случаев использую карбон так же ради моды, а не ради технической целесообразности, увы, таков спрос.