Интелектуальный , умный и независимый подвес камеры? Реально!

Обновил англоязычный текст.
Русский выложу тут:
Объяснение различий между Force Servo и прямым приводом.
Будет рассматриваться ситуация, когда сервопривод создает усилие, но не вращает нагрузку циклически.
Сила
В Force Servo между двигателем и датчиком силы установлен редуктор, который повышает крутящий момент. При помощи редуктора можно адаптировать баланс силы и скорости в широком диапазоне значений. Прямой привод всегда действует в не эффективном режиме. На графике представлено наглядное сравнение крутящих моментов.
Скорость
Force Servo проектируется с таким редуктором, что бы обеспечить оптимальное соотношение по запасу скорости и запасу мощности. Передаточное число редуктора может быть в интервале от 1 (быстрое вращение) до 1000 (высокий крутящий момент). Обычно, оптимальное передаточное число редуктора для небольшой платформы с камерой примерно равно 100.
Прямой привод не использует редуктор. Так как двигатель нагружен тяжелой платформой с камерой, то прямому бесколлекторному приводу не хватает мощности, что бы достаточно быстро повернуть или затормозить массу нагрузки. Большая часть энергии прямого привода идет не на вращение, а на нагрев обмоток в двигателе.
Точность
Force Servo содержит датчик силы и создаваемое усилие соответствует заданному, не зависимо от положения качалки. Механический шум в Force Servo поглощается упругим элементом в муфте.
В прямом приводе усилие задается подаваемым током, но необходимо делать поправку на циклические колебания и на силу трения. Из-за импульсного управления прямой привод передает на нагрузку высокочастотные колебания.
Контроль
Для управления прямым бесколлекторным приводом необходимо учитывать положение ротора относительно статора. Иными словами дополнительная обратная связь по положению является обязательной. Управление Force Servo проще: по прямой и дифференциальной обратной связи дается команда на движение для сокращения ошибки относительно заданной величины. Заданную величину могут устанавливать различные датчики и их комбинации: оператор, гироскоп, акселерометр, оптический маркер, смещение объекта в видеоряде.
Результат
Если речь идет о стабилизируемой платформе для видеокамеры, то корректнее всего использовать измеряемые характеристики. Установим на стабилизируемую платформу лазерный указатель и измерим величину колебаний с дистанции в 10 или 100 метров. Лазерный луч позволяет отличить эффект стабилизации платформы от эффекта оптической или цифровой стабилизации видео.
На затравку: прямой привод не обязательно должен быть цилиндрической формы. Достаточно нескольких магнитов и катушек на длинном плече, и мы сразу получаем высокий момент, но на ограниченном угле. Он отработает быстро. А редукторный привод может крутить медленно, но на любой угол.
Для затравки,информация к размышлению: \\\ www.ruchservomotor.com/ruch/synch_linear.htm /// www.itrostov.ru/_3670520?good_id=79561 \\\ www.itrostov.ru/_3670520?good_id=79558 \\\ …com.ua/…/lineynye-servodvigateli-serii-accurax-gw \\\ обзор electroprivod.ru/linear_public.htm \\\ www.actuator.ru/lineinyeactuatori.html \\\ dalkos.ru/…/linejjnye-dvigateli-prjamogo-privoda-k…
Алексей, ваши разработки, это замечательно, никто не отрицает. Но подавляющее большинство пользователей хотят видеть конечный результат - подвес. Пока его не будет, то для многих, все это, только красивые слова.
А по поводу шумов БК моторов - они ничтожны по сравнению с вибрациями на коптере, с которыми многие, так и не научились правильно бороться. И все снова упрется в качество демпфирования.
Но подавляющее большинство пользователей хотят видеть конечный результат - подвес. Пока его не будет, то для многих, все это, только красивые слова.
Форум для слов и предназначен.
Я уже привык к особенностям форума с формулировкой “это фигня, нам нужно больше, еще больше”.
Стараемся. Хотя, и подвес уже есть, и не один.
Вот параметры последнего:
Максимальная нагрузка 10кг
Оптимальная нагрузка 5кг
Масса рамы и сервоприводов – 1,2кг
Максимальная скорость компенсируемого вращения – 1500град/сек
Максимальный крутящий момент – 10кг*см
Ограничение продольного наклона – от –75 до +135 градусов
Ограничение поперечного наклона – от –45 до +45 градусов
Ограничение панорамного вращения – неограниченное вращение
___________________________________
Да, шумы это не главное в списке сравнительных характеристик, но такой пункт тоже есть и разница в два порядка - это существенно.

Кстати, о линейных двигателях, состоящих из одной, единственной катушки - в камерах Canon используется такое решение как на картинках ниже ( вместо шагового мотора). Фокусная линза, приводимая в движение таким образом, имеет имеет как преимущество - полную бесшумность и скорость. Обратная связь построена на базе двух оптических энкодеров. Считывание происходит с линейного микрорастра установленного на подвижный блок. Также прилагаю микрофото кристалла энкодера. Здесь фото покрупнее - www.dropbox.com/sh/5yq0w8kykc3unqz/CDLGJQKnje
Вообще, фирма Canon очень любит использовать оптические энкодеры везде где это только возможно - особенно в кольцевых ультразвуковых моторах объективов. Эта система имеет только один существенный недостаток - попадание небольшого количества смазочного материала, влаги или пыли приводит к ошибкам считывания микрорастра. Хотя это лечится очень просто - чисткой изопропилом.
Я уже привык к особенностям форума с формулировкой “это фигня, нам нужно больше, еще больше”.
Алексей, не воспринимай все в штыки. Никто не говорит фигня. Разработка отличная. Просто хочется вместо “гантели” видеть камеру, и не на подставке, а в воздухе. Ведь название темы обязывает 😉
Алексей, не воспринимай все в штыки. Никто не говорит фигня. Разработка отличная. Просто хочется вместо “гантели” видеть камеру, и не на подставке, а в воздухе. Ведь название темы обязывает 😉
Эцилоп с камерами уже демонстрировался.
Че-то вспомнилась классика про “прикурить не найдется… а почему не зажигалкой…” офтоп от сюда: bash.im/quote/399358
Эцилоп с камерами уже демонстрировался.
Алексей, не в обиду, можно “на бис” стабилизацию камеры в полёте.
Алексей, не в обиду, можно “на бис” стабилизацию камеры в полёте.
аппарт уже месяца три назад продан, а видео это осталось в сети :
Такие тесты нагляднее на урбанистическом фоне, а не на фоне зелени растущей на склоне, но всё равно видны огрехи стабилизации, да и “тихие сервы” слышны сквозь шум ВМГ, может быть сильно придираюсь.
П.С. Потребитель голосует монетой, всем нам удачи.
Такие тесты нагляднее на урбанистическом фоне, а не на фоне зелени растущей на склоне, но всё равно видны огрехи стабилизации, да и “тихие сервы” слышны сквозь шум ВМГ, может быть сильно придираюсь.
Ранее речь шла о механическом шуме, сообщаемом непосредственно камере. Аккустические шумы устраняются иными средствами.
Я че-то не наблюдаю у других производителей демонстраций с оптическим зумом, чтобы весь полет демонстрировался без нарезок, да и летают во время демонстраций в “летаргическом” стиле. На всякий случай напомню, что демонстрировался Эцилоп с двух-осевой стабилизаций (roll+tilt).
Начинаем тестировать подвес с вращаемой массой 9,5 кг:
На затравку: прямой привод не обязательно должен быть циллиндрической формы. Достаточно нескольких магнитов и катушек на длинном плече, и мы сразу получаем высокий момент, но на ограниченном угле. Он отработает быстро. А редукторный привод может крутить медленно, но на любой угол.
Последний пример в этом видео:
Ранее речь шла о механическом шуме, сообщаемом непосредственно камере. Аккустические шумы устраняются иными средствами.
Вы измеряли и сравнивали шумы в статике под нагрузкой, а если в динамике, то результат будет обратный. Жужание редуктора сервы слышны через звук ВМГ, и напротив, БК привод в динамике беззвучен на слух т.к. он не лучший излучатель 16ти кГц. Про неравномерность и низкий крутящий можно говорить про привод 14 зубов, но 72 зуба со сглаженным статором практически решают проблему, и это не предел. Прямой привод в выигрыше по умолчанию из-за отсутствия редуктора и возможности совершенствования, серва себя исчерпала, а обратную связь можно добавить и к БК приводу.
Вы измеряли и сравнивали шумы в статике под нагрузкой, а если в динамике, то результат будет обратный. Жужание редуктора сервы слышны через звук ВМГ, и напротив, БК привод в динамике беззвучен на слух т.к. он не лучший излучатель 16ти кГц. Про неравномерность и низкий крутящий можно говорить про привод 14 зубов, но 72 зуба со сглаженным статором практически решают проблему, и это не предел. Прямой привод в выигрыше по умолчанию из-за отсутствия редуктора и возможности совершенствования, серва себя исчерпала, а обратную связь можно добавить и к БК приводу.
- Серва с фактической обратной связью по силе - это и есть F-Servo, не зависимо от наличия редуктора.
- Серва под нагрузкой шумит и в зажатом варианте. Просто берете любую редукторную серву и слушаете - они все примерно одинаково шумят и этого не слышно на фоне пропеллеров. Задача снижения шума решается известными способами, но это не так актуально для массовых серв. Вокруг нас везде редукторы - начиная с настенных часов и кончая автомобилем.
- Стандарт записи звука - 48кГц, и 16кГц прекрасно записываются. Ухо воспринимает хуже, но давайте говорить об измеряемых параметрах для механики - разница в 2 порядка - 100 раз. Повышая еще частоту ШИМ возникают иные проблемы в проводке.
- увеличивая количество пар полюсов вы сокращаете периоды, но не устраняете нелинейность трехфазных переходов.
- выигрыш по “умолчанию”? или по замалчиванию недостатков? Развитие как живых, так и не живых систем идет в сторону усложнения и повышения эффективности. При этом редукторные сервы проще в массовом производстве, это можно видеть и по цене. Китайская женщина быстрее складывает шестерни в редуктор, нежели наматывает много-полюсники тонким проводом. Заменить шестерню - ерунда, а перемотать ваши 72 зуба - проблема.
- “Возможность совершенствования прямого привода”? покрасить линейный двигатель в другой цвет? или что концептуальное имеется в виду?
- “Серва себя исчерпала”?. Привод без редуктора был временным решением. Это было очень не эффективно, но позволяло камере не упираться в редуктор. Дополнение устройства упругим элементом и датчиком силы позволяет механизму работать лучше, чем прямой привод.
Инерционная стабилизация требует, что бы не было сопротивления со стороны привода, когда умышленное вращение не требуется. Попробуйте повторить пример со сгоревшей спичкой 😃
Бесколлекторные приводы будут встречаться в технике все чаще, так как упростилось их управление. Но там, где обороты низкие - будут устанавливаться редукторы. Для подвесов камер используются контроллеры с максимальной обрабатываемой скоростью 2000грд/сек - этого более, чем достаточно, и это диаппазон редукторных механизмов. Для “экстра” вариантов можно развивать комбинированные решения, о которых упомянул АлксМос, но это уже для систем наблюдения с сильным телезумом.
P.s. может зря я сюда залез поздней ночью в пятницу…
Последний пример в этом видео:
Я думаю активные дамперы вибраций, это следующий шаг в любительском подвесостроении 😃 Я тоже рисовал несколько конструкций, где можно их применить. В частности, при ходьбе с ручным подвесом вибрации от шагов довольно существенны. Но судя по многим видео, производители решили эту проблему обычным пассивным дампером, так что излишнее усложнение ни к чему. Но при съемках с движущейся техники, где уровень вибраций повыше, это будет очень востребовано.
Я думаю активные дамперы вибраций, это следующий шаг в любительском подвесостроении Я тоже рисовал несколько конструкций, где можно их применить. В частности, при ходьбе с ручным подвесом вибрации от шагов довольно существенны. Но судя по многим видео, производители решили эту проблему обычным пассивным дампером, так что излишнее усложнение ни к чему. Но при съемках с движущейся техники, где уровень вибраций повыше, это будет очень востребовано.
Думаю самая подходящая технология от Bose.
Думаю самая подходящая технология от Bose.
В статье по вашей ссылке говориться:
Баланс примерно такой: в высокоактивном режиме 4 ЛЭ расходуют в общей сложности 20-25 кВт мощности. Немало; но они и возвращают в сеть (рекуперация) 16-20 кВт. В любом случае нужен мощный альтернатор с приводом от вала двигателя – и емкая батарея.], однако электроупругие элементы/амортизаторы не рассеивают энергию впустую, а всякий раз рекуперируют ее – возвращают обратно в бортовую сеть. Вообразите ситуацию: ветер раскачивает машину на стоянке, а ЛЭ тем самым вырабатывают э-энергию и подзаряжают батареи… Ветроэлектростанция.
тут ключевое слово “вообразите”. 20кВт - это мощность отопительного котла в моем доме на 140 квадратных метров (за окном сейчас -20, а дома +24). Про то, что с амортизаторов машины можно обратно снять 20кВт - 😁 . Вы видели дизельный генератор на 20кВт ? А тут говориться, что с амортизаторов это снимать можно, просто как что-то побочное 😃 Как выглядит электрический кабель, который с умеренными потерями будет передавать мощность в 25кВт (при 12В это 2083 Ампера).
Автору статьи пора вечные двигатели описывать.
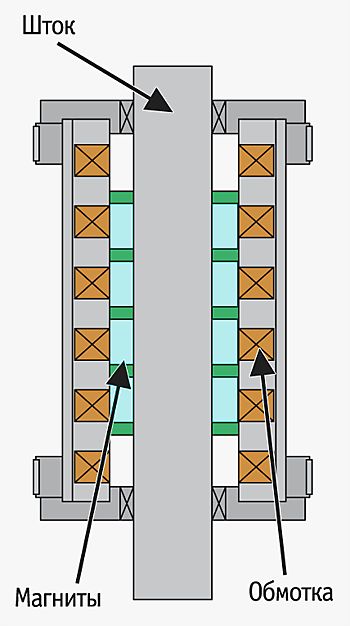
Если сделать так как нарисовано, то работать не будет. При такой схеме обмотки расплявятся, а нужной силы не выдадут. Либо че-то недосказано и не показано, либо фантазия. Системы амортизаторов с клапанами работают с 70 готдов (если не ошибаюсь), клапанов достаточно, чтобы гасить резонансные отскоки (это без компрессора). С компрессором можно делать прыгающие машины и с шиком ездить по гетто. Линейные электро-двигатели в томже масштабе такого эффекта не дают.
Высокочастотные колебания гасятся надувной резиновой покрышкой, а амортизатор работает с более высокими амплитудами и меньшими частотами.
Я думаю активные дамперы вибраций, это следующий шаг в любительском подвесостроении 😃 Я тоже рисовал несколько конструкций, где можно их применить. В частности, при ходьбе с ручным подвесом вибрации от шагов довольно существенны. Но судя по многим видео, производители решили эту проблему обычным пассивным дампером, так что излишнее усложнение ни к чему. Но при съемках с движущейся техники, где уровень вибраций повыше, это будет очень востребовано.
То, что делал я, было расчитано именно на вибрации инфра-звукового диаппазона. На коптерах резонансные колебания часто находятся на уровне порядка 10Гц.
Если сделать так как нарисовано, то работать не будет. При такой схеме обмотки расплявятся, а нужной силы не выдадут.
Остапа понесло😁, я имел в виду применить такую систему для вертикальной стабилизации подвесов в случаях описанных alexmos.
А вообще почему расплавится и работать не будет, это классическая схема цилиндрического линейного привода, обсчитывали в Максвеле всё отлично работает, естественно с эффективным охлаждением которым можно отапливать салон авто.
Моё мнение опирается на 50ти летний опыт эксперта и изобретателя магнитных систем, нашей фирмы.
Остапа понесло, я имел в виду применить такую систему для вертикальной стабилизации подвесов в случаях описанных alexmos.
А вообще почему расплавится и работать не будет, это классическая схема цилиндрического линейного привода, обсчитывали в Максвеле всё отлично работает, естественно с эффективным охлаждением которым можно отапливать салон авто.
Моё мнение опирается на 50ти летний опыт эксперта и изобретателя магнитных систем, нашей фирмы.
Неудобно тролить, но вы основали вашу фирму магнитных систем в возрасте четырех лет?
В моих разработках активных дампферов даже не рассматривался вариант того, что бы электромагнит уравновешивал массу платформы. Т.е. мои образцы расчитаны на устранение резонансных колебаний, но не могут наклонять платформу, как в представленной статье, где контролируется крен авто. Таким образом еще можно обойтись без “отопления салона от аммортизаторов”
Неудобно тролить, но вы основали вашу фирму магнитных систем в возрасте четырех лет?
Я имел в виду не себя и не говорил про возраст фирмы, она на много моложе.
О наших разработках, из последнего - привод массой 600г с крутящим в статике 90кг/см, а из более ранних - привод антенны, габариты: диск 100ммх12мм, 20кг/см, статор без зубцов гладкий тор с намоткой по кругу.
На затравку: прямой привод не обязательно должен быть циллиндрической формы. Достаточно нескольких магнитов и катушек на длинном плече, и мы сразу получаем высокий момент, но на ограниченном угле. Он отработает быстро. А редукторный привод может крутить медленно, но на любой угол.
Беллисимо! именно так и устроен cineflex, который по качеству стабилизации до сих пор никем не превзойден.




Там основной привод редукторный, а вся тряска и вибрация убирается электромагнитным приводом как в подвесах лазера в CD-приводах. Система пятиосевая, и первая ось - крена.
работает оно вот так:
ща народ похватает приводы поворота головки из HDD и сделает систему годную для стрельбы с БПЛА класса мини и даже микро. эх