Интелектуальный , умный и независимый подвес камеры? Реально!

Алексей, пока не будет видео с ваших платформ, пешего и полетного - все слова в пустую. Это не форум guns.ru, и мы тут не лазерное оружие разрабатываем. Камеру на подвес и вперед гулять. Видео публике. А там мы уж проголосуем рублем. А пока, все это пустая болтовня понятная и интересная ограниченному несколькими людьми контингенту.
Да, давайте уже продукт п ожалуйста,
Здоровая конкуренция это хорошо, особенно если она конкрентая,
в пластике и металле, и ее можно себе позволить)
Алексей, пока не будет видео с ваших платформ, пешего и полетного - все слова в пустую. Это не форум guns.ru, и мы тут не лазерное оружие разрабатываем. Камеру на подвес и вперед гулять. Видео публике. А там мы уж проголосуем рублем. А пока, все это пустая болтовня понятная и интересная ограниченному несколькими людьми контингенту.
Самое ценное, что я тут вижу - это и есть ограниченный несколькими людьми контингент. Присутствующий скептицизм стимулирует. В рублевое голосование я не верю 😃 Практика показывает, что Российский спрос на новинки запаздывает относительно моды в иных регионах. Полетное видео и ручной вариант было раньше.
Да, давайте уже продукт п ожалуйста,
Здоровая конкуренция это хорошо, особенно если она конкрентая,
в пластике и металле, и ее можно себе позволить)
Да, сроки затянулись, сам бы рад быстрее… Но скорее всего, что я еще продемонстрирую пару прототипов, прежде чем будет предложено.
Алексей, а есть видеотесты работы твоей системы в составе трехосевого подвеса? Одну ось можно гонять долго и добиться отличных показателей, но это совсем не то же самое, что три оси вместе. Извиняюсь если уже было, но пропустил.
Тестировать одну ось можно таким образом: мощный мотор крутит рамку, к ней через второй мотор прикреплен стабилизируемый лазер. На первый мотор ставится контроллер с IMU, чтобы крутить его по заданной программе с заданной скоростью и ускорением вращения. Когда исходные условия эксперимента всегда одни и те же, легко сравнивать контроллеры и алгоритмы стабилизации.
там ошибки меряют микрорадианами Моторы там получше, чем можно купить сейчас, но базовый принцип тот же.
ладно моторы, в целом все косяки устраняются математикой и соответствующей вычислительной мощностью. Но микрорадианы? что там с датчиками? МЕМС такого в принципе не обеспечит. ВОГи? ДНГ?
Алексей, а есть видеотесты работы твоей системы в составе трехосевого подвеса?
Коротко показано тут
Конечно, в рабочих условиях показатели сильно падают относительно стенда с одной осью. Видна большая разница по горизонтали и по вертикали - это как раз и связано с эффектом разнесенных по плечам грузов. Если ходить со стендом плавно, как ходят операторы “стэдикам”, то демонстрация будет ни о чем. Т.е. часто демонстрируется не работа подвеса, а умение оператора плавно двигаться 😃
Более художественно планируется сделать уже с новым контроллером, но сроков обещать не буду.
ладно моторы, в целом все косяки устраняются математикой и соответствующей вычислительной мощностью. Но микрорадианы? что там с датчиками? МЕМС такого в принципе не обеспечит. ВОГи? ДНГ?
Математикой недостатки механики не устраняются до такой степени. Можно приблизить модель к реальности, но остаются изменчивые силы трения. Это может компенсироваться в оптике, но не на основных осях.
Когда я говорил, что могу еще многократно повысить точность, то уже подумывал о вакуумном корпусе и магнитных подшипниках. Естественно, что на такие эксперименты придется тратить много времени.
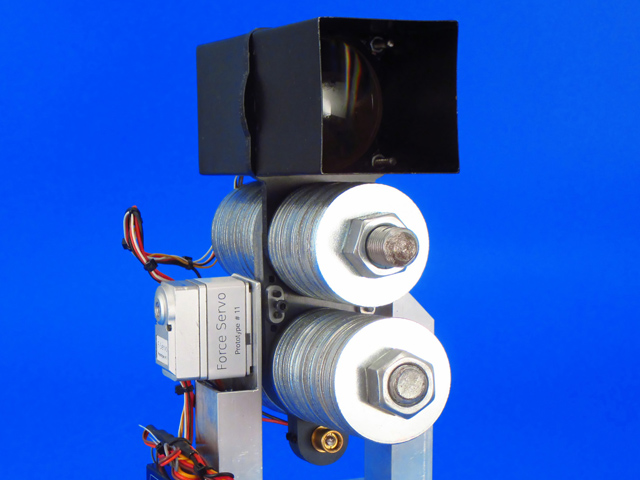
сделал лазерный тест на подвесе Ecilop Easy
подвес Ecilop Easy
версия Force Servo
серво MKS Ds8910
контроллер ZYX-GS
дистанция 10m
отклонения ±0.05m
дистанция 10m
отклонения ±0.05m
±0.3 градуса, вполне себе. Почти как SimpleBLGC, но не так круто как Ustab😁😎
Математикой недостатки механики не устраняются до такой степени. Можно приблизить модель к реальности, но остаются изменчивые силы трения. Это может компенсироваться в оптике, но не на основных осях.
Можно. Если постаить соответствующий энкодер, то на неплохом BLDC микрорадинаны получить не составит большого труда. Возможно придется поработать с быстродействие силовой части, но проблем там особых не предвидится. Дорого - да, но не невозможно. А вот с инерциалкой как бэ проблемы. Есть двухосевые ДНГ весом всего 80г, но опыта работы с ними никакого - только институтская теория.
Есть двухосевые ДНГ весом всего 80г
ДНГ - это жопа (= А вообще, о каких идёт речь ? просто ДНГ навигационного класса. стоят как подержанная иномарка (=
Мы тут недавно ковыряли ММГ интересные, показали они очень достойный результат за сравнительно небольшие деньги. И очень хороший результат показал полноценный IMU, но он в достаточно тяжелом корпусе, и стоит как подержанная иномарка опять же (=
±0.3 градуса, вполне себе. Почти как SimpleBLGC, но не так круто как Ustab😁😎
Cделайте в вашем контроллере выход для F-Servo 😃 На стенде с модифицированным прибором DirectionFinder лучь у меня следил за маркером с колебаниями в 3мм с 10 метров (видео с мишенью).
Это не форум guns.ru, и мы тут не лазерное оружие разрабатываем. Камеру на подвес и вперед гулять. Видео публике.
Почему надо использовать лазер:
Если идти со стабилизатором в руках то на каждом шаге будет возникать отклонение в стабилизаторе не более 5см для объекта на расстоянии в 10м, а позиция камеры с каждым шагом смещается на 50см. Таким образом тест становиться не корректным.
±0.3 градуса, вполне себе. Почти как SimpleBLGC, но не так круто как Ustab
У меня лазерный тест показывал 0.09 гр для одной оси на стенде при внешних скоростях от 100 до 600 гр/сек. Но это все мало что говорит о работе на подвесе, когда осей три, и не стенд а реальная камера со всеми нагрузками трениями и т.д. Ну и разные контроллеры сравнивать некорректно, вы же можете просто не добиться правильной настройки. Стенд хорош, чтобы сравнить разные алгоритмы, например, или отладить алгоритм.
У меня лазерный тест показывал 0.09 гр для одной оси на стенде при внешних скоростях от 100 до 600 гр/сек. Но это все мало что говорит о работе на подвесе, когда осей три, и не стенд а реальная камера со всеми нагрузками трениями и т.д. Ну и разные контроллеры сравнивать некорректно, вы же можете просто не добиться правильной настройки. Стенд хорош, чтобы сравнить разные алгоритмы, например, или отладить алгоритм.
У вас и ГУИ показывает ошибку 0.2 когда реально 0.57 на лазер тесте от skydiver
0.57 на лазер тесте от skydiver
0.57 это амплитуда ошибки, правильнее говорит о ±0,29. Тоже и о Ustab, 0.06 или ±0,03.
Ну и разные контроллеры сравнивать некорректно, вы же можете просто не добиться правильной настройки.
Ну если на стенде, где условия почти идеальны, настроить систему в идеал может только ее разработчик, то как бэ возникают вопросы. Условия теста были идентичны на 100%, результат уж какой есть. Безусловно в динамике будет чуть хуже, но ведь и вашу плату тестили также в идеальных условиях. Пока что мы доводим функционал до уровня, фоллоу ми, отсутствие срывов как таковых, и др. есть над чем работать и где догонять)
Имеем:
стандартный размер серво;
индикатор для точной балансировки нагрузки;
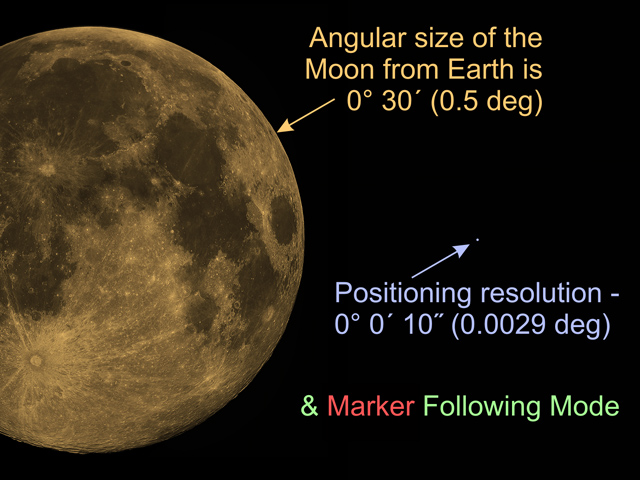
разрешение в 10 угловых секунд;
работа с целеуказателем.
Имеем:
стандартный размер серво;
индикатор для точной балансировки нагрузки;
разрешение в 10 угловых секунд;
работа с целеуказателем.
Че-то в прошлом посте видео не отображает. Номер видео на вимео - 98277684
можно будет с коптера стрелять по подсвеченному ммм… оленю, с расстояния метров 100? (шутка)
о использовании напишите. стенд информативен разработчику, а так как то не улавливается вся крутость разработок.
Я предлагаю универсальный способ для сравнения качества работы разных стабилизаторов видеокамеры.
Угловая величина Луны одинакова во всем мире. Ее видимая величина составляет от 29′24″ до 33′40″. Для удобства можно считать равной 0,5 градуса. Что бы сравнить подвесы достаточно направить камеру на луну и активно раскачивать подвес камеры. Использование оптического или цифрового стабилизатора не допускается. Для подтверждения можно использовать лазер.
вимео тут не отображалось, продублировал на ю-тубе:
Я предлагаю универсальный способ для сравнения
Тут проблема в креплении самого подвеса, перед тестом. (если правильно понял). Но мысль хорошая. Аналогично проводят единое ориентирование геодез.приборов и передачу геодезических направлений на разнесенные приборы. С затемняющей блендой можно и с солнцем. Угловые ошибки замеров в зависимости от места проведения теста сведутся практически к нулю. Это уровень измерительных гироскопов с оптической осью, где ошибки не более 5-7 секунд для ор. направлений
Я предлагаю универсальный способ для сравнения качества работы разных стабилизаторов видеокамеры.
Да, это самый корректный споособ. Лазер хорош на стенде и только для одной оси. Но достижения на стенде, и в реальном подвесе - вещи разные. У этого способа остается один минус, непонятно как нужно трясти подвес и как это контролировать?
Остается только установка контрольных приборов (выверенных и освидетельствованных, с высоченным разрешением) на подвижную платформу подвеса. Только ими можно разглядеть реальные ошибки по точности работы . Но такие приборы востребованы не у всех, стоят они конкретно много, посему редкость. Дополнительно с точностью конечного восстановления положения, необходимо измерять и скорость(время) рассогласования оси с последующим ее восстановлением. Точность восстановления предельно зависит от разрешения датчика. Скорость восстановления – это уж совокупность всех составляющих подвеса.
Все это актуально для тех кто занимается конкретно разработкой систем.
Да, это самый корректный споособ. Лазер хорош на стенде и только для одной оси. Но достижения на стенде, и в реальном подвесе - вещи разные. У этого способа остается один минус, непонятно как нужно трясти подвес и как это контролировать?
Например, надо по горизонтали сделать один полный оборот за 1 секунду. Сверх-точные приборы не обязательны, так как на данном этапе развития будут выявляться кратные отличия у разных производителей.
Чтобы точнее увидеть отклонение на чужом видео, можно в начале видео на экран монитора приклеить липкий бумажный листок для заметок по краю луны. Далее наблюдать увеличение щели между луной и краем бумаги (стикера). Если щель равна величине луны, то это 0,5 градуса.