Интелектуальный , умный и независимый подвес камеры? Реально!

Цену удовольствия еще никто не назвал, а уже очередь. Кстати ее публичное озвучение потенциально может привлечь других разработчиков желающих освоить новый рынок. Что приведет к развитию со всеми вытекающими.
Вот платы сам стругать стал!!
А какие у сборки характеристики получаются?
Цену удовольствия еще никто не назвал, а уже очередь. Кстати ее публичное озвучение потенциально может привлечь других разработчиков желающих освоить новый рынок. Что приведет к развитию со всеми вытекающими.
братцы! вы чего! я же шучу. Обычно я такие вещи беру во вторую волну продаж. Когда первую партию оттестируют и уберут косяки. У меня есть парочко неплохо работающих подвесов. Хотя признаюсь, поддался общему психозу и струганул быстра буратинку для брашлесов ( на фото). Посему переквалифицирую шутку в бескомпромисное заявление _ БЕРУ. Буду бета-тестером, единомышленнико-соратником, бета-самцом и т.д.
Обычно я такие вещи беру во вторую волну продаж. Когда первую партию оттестируют и уберут косяки.
Ну тогда все пойдем во вторую волну … 😁
В связи с тем, что вместо одной работающей прошки у меня неожиданно стало сразу три, появилась возможность сделать любопытный тест в домашних условиях. Делал для себя самого, но на всякий случай выкладываю. Картинка здесь поделена на две части: слева то, что видит камера не стабилизированная, но зато хорошо буферизованная велкро (пляски второй камеры – это работа подвеса со стороны в чистом виде), справа – то, что видит камера на подвесе, подвешенная в “ветроустойчивой” конфигурации, т.е. без буферизации по осям, с расчетом на дальнейшую обработку дишейкером. Опыт показал, что такая конфигурация в наших нью-йоркских условиях предпочтительнее, потому что позволяет получить сырое видео, хотя и не идеальное в смысле дрожания, но с которым гарантировано можно работать. С буфером же – либо идеальное без дрожания (если снимать в ветрозащищенном месте), либо же полная колбасня, из которой что-то путное сделать трудно. Могу только позавидовать людям, у которых бывает безветренная погода – у нас последний безветренный день был, кажется, в самом начале осени.
Обработка здесь такая: левое (GoPro 3) уменьшено с 1080/60p до 720/60p, правое (GoPro2) немного подшарплено и затемнено, из обоих клипов вырезаны центральные части и синхронизированы с пом. avisynth. Программная стабилизация не применялась, fps такой же как в оригиналах.
Сделал из мотора серву, в качестве энкодера сопротивление из сервы!
Надо на подвесе проверять(
У меня подозрение, что с потенциометром все таки не будет нужной точности. Очень интересно на повесе проверить 😃
А тем временем в СПб …



Стоит понимать что это не полетный вариант-тяжёлый очень, просто собрали потетстить и с мощностью двигателей определиться.
Нарезка тестов за сегодня, иногда появляется колбасня по крену - это подвес с рукой резонирует(тяжелый сцуко).
Ну вы блин даете (с) 😃
Мне уже жаль команду dji с ихним дорогим подвесом)))
Всем удачи в развитии этих подвесов!
Сделал из мотора серву, в качестве энкодера сопротивление из сервы!
Надо на подвесе проверять(
Сергей, но уже как бы давненько в продвинутых брендовых сервах как бы бесколекторники ставят. Или я что то путаю, всеж не разбирал. но не думаю что это ошибка и чтото перепутал…и ведь действительно не перепутал, там стоят инрунеры .
В связи с тем, что вместо одной работающей прошки у меня неожиданно стало сразу три, появилась
Очень даже впечатлительна работа подвеса
Сергей, но уже как бы давненько в продвинутых брендовых сервах как бы бесколекторники ставят. Или я что то путаю, всеж не разбирал. но не думаю что это ошибка и чтото перепутал…и ведь действительно не перепутал, там стоят инрунеры …
Да это понятно, но здесь один неоспоримый плюс - директ драйв тоесть прямой привод!
Например в очень крутых чпу стоят трехфазники - с энкодором , но редуктор не пользуют - нужна точность и скорость!
Я может осилю и соберу подвес еще с резисторами, можно будет сравнить!
Правда у меня теперь идея поставить и гиры и энкодеры)))
Да это понятно, но здесь один неоспоримый плюс - директ драйв тоесть прямой привод!
Сергей, но ведь за счет передачи и ее соотношения можно увеличить силу поворота, а также уменьшить дискритизацию поворота. При этом скорости хватит . Какие это перспективы для тяжелых систем и экономии энергии. Люфт (зазор) при этом побеждается механически “разрезными” шестеренками. Они в подвесе ни как не маленькие (шестерни) и это не сложно. Это как у точных геодезических приборов. Две шестеренки на одном валу. Одна может смещаться в ручную или пружиной для выбора зазора с ведушей и тем самым люфтам - досвидос. Это подобие установки двух серв на одну ось, но намного дешевле и проще как в ценовом вопросе так и настройки отчуждения люфтов (а люфт то всего в одном звене;))
poneslas’ +2
В третьем видео количество шагов посчитать можно. Тряска очень сильная.
В третьем видео количество шагов посчитать можно. Тряска очень сильная.
это не шаги а cogging, t.e. некий эффект залипания …
Перед всеми снимаю шляпу . изучил тему , очень заинтересовался . вроде даже более менее разобрался , но остались вопросы . Был бы крайне признателен, если бы потратили чуть-чуть времени,и популярно объяснили.
-
Моторы,
Насколько я понял перематывать надо любой мотор, нет на сегодняшний день удовлетворяющего готового . собственно вопрос как перематывать, и каковы критерии . откуда взялись 10 Ом.подойдут ли многополюсники , и глядя на схемы перемотки толком не понял разницу (= может не туда смотрел. -
Контроллеры моторов . логика понятна - 3 синуса смещённых по фазе, а вот как это воплотить в жизнь ,причём чтобы можно было использовать общедоступный мозг неясно мне … И вообще , возможно ли это в стиле хоум мейд (=
Заранее спасибо .
это не шаги а cogging, t.e. некий эффект залипания …
угу, значит не хватает силы тока для моторки…
В третьем видео количество шагов посчитать можно. Тряска очень сильная.
=кол-во полюсов/2, а каждый такой шаг = 360градусов синусоиды
Моторы,
Насколько я понял перематывать надо любой мотор, нет на сегодняшний день удовлетворяющего готового . собственно вопрос как перематывать, и каковы критерии . откуда взялись 10 Ом.подойдут ли многополюсники , и глядя на схемы перемотки толком не понял разницу (= может не туда смотрел.Контроллеры моторов . логика понятна - 3 синуса смещённых по фазе, а вот как это воплотить в жизнь ,причём чтобы можно было использовать общедоступный мозг неясно мне … И вообще , возможно ли это в стиле хоум мейд (=
- перематывать оч хорошо по penolet.ru/content/110?page=2 проводом 0.15-0.2мм диаметром, чем больше полюсов тем лучше - больше сопротивление и меньше шаг.
- можно спокойно сделать и дома, главно уметь разводить и изготавливать платы, паять а также уметь программировать…
можно спокойно сделать и дома, главно уметь разводить и изготавливать платы, паять а также уметь программировать
Ну а для тех кто с C/C++ не дружит ,прошики гденьть выложены ?
Это все лирика про уметь паять:)
что куда разводить то? 😁
это пример контроллера для трехфазного двигателя, который управляется ардуиной:
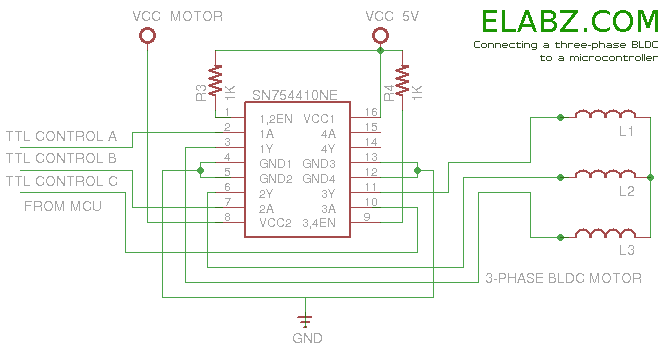
это пример скетча, который дает 3 фазы на ШИМ выходах ардуины и , подобно библиотечному примеру servo sweep крутит мотор вперед, а потом назад.
const int ROLLmotorPin1 =9; //мотор подключен к выходам 9 10 11
const int ROLLmotorPin2 =10;
const int ROLLmotorPin3 =11;
boolean direct = true; //направление движения
int pwmSin[] = {127,110,94,78,64,50,37,26,17,10,4,1,0,1,4,10,17,26,37,50,64,78,94,110,127,144,160,176,191,204,217,228,237,244,250,253,254,253,250,244,237,228,217,204,191,176,160,144,127};
int increment;
int RollPos = 1;
int ROLLcurrentStepA=0; //первая фаза мотора крена
int ROLLcurrentStepB=16; //вторая фаза
int ROLLcurrentStepC=32; //третья фаза
void setup() {
pinMode(ROLLmotorPin1, OUTPUT);
pinMode(ROLLmotorPin2, OUTPUT);
pinMode(ROLLmotorPin3, OUTPUT);
}
void loop() {
for(RollPos = 0; RollPos < 47; RollPos += 1) //крутить 47 шагов вперед
{
increment = 1;
move ();
delay(50);
}
for(RollPos = 47; RollPos>=1; RollPos-=1) //крутить 47 шагов назад
{
increment = -1;
move ();
delay(50);
}
}
void move()//блок вращения двигателей
{
ROLLcurrentStepA = ROLLcurrentStepA + increment;
if(ROLLcurrentStepA > 47) ROLLcurrentStepA = 0;
if(ROLLcurrentStepA<0) ROLLcurrentStepA =47;
ROLLcurrentStepB = ROLLcurrentStepB + increment;
if(ROLLcurrentStepB > 47) ROLLcurrentStepB = 0;
if(ROLLcurrentStepB<0) ROLLcurrentStepB =47;
ROLLcurrentStepC = ROLLcurrentStepC + increment;
if(ROLLcurrentStepC > 47) ROLLcurrentStepC = 0;
if(ROLLcurrentStepC<0) ROLLcurrentStepC =47;
analogWrite(ROLLmotorPin1, pwmSin[ROLLcurrentStepA]);
analogWrite(ROLLmotorPin2, pwmSin[ROLLcurrentStepB]);
analogWrite(ROLLmotorPin3, pwmSin[ROLLcurrentStepC]);
}