Rabbit Flight Controller

… ну, мне кажется что раставлять системы по-местам, как впрочем их сравнивать не вполне корректно, так как на конечный результат влияет так много факторов, что без научных-лабораторных тестов мы ничего не получим. да и сам “конечный результат” для каждого пользователя свой. Мне например, именно в данный момент не устраивает плавность полета особенно в ветер, это в рамках съемки видео. Фото впринципе нормально. Но тут есть в запасе игра настройками контроллера, перепрошивка регулей, доработка конструкции подвеса. Как уже говорил ранее, желание попробовать эцилоп ( при удачном стечении обстоятельств), может дать некоторое удовлетворение. Но вот сколько не прикидываю, ну нечем мне в данный момент заменить кроля по комплексу факторов. Пока на прицеле немец, но и то только после того, как наиграюсь с рамами, подвесами, регулями, пропеллерами ,моторами… ))
а так , что касается : … китайской электроники, …что ,то что летает имеет обыкновение упасть, … предполетной подготовки, и т.д., это и так все понятно
з.ы. … а то, что появление крола, это реальный шаг в хоббийном коптеростроении,это неоспоримый факт. Даже наза получила пинок для скорейшей установки джипиэса.
… ага, холивар утих, теперь вернемся к нашим баранам( кролям) ).
Вот в тридцатой прошивке есть расширенные настройки в работе джипиэс, вчасности регулировка скорости возврата домой и настройки на ветер. Уже есть опыт настройки этих параметров, методики какие? какие стоковые значения могут быть более-менее приемлемыми или рабочими? не хочеться заниматься тупым двиганием слайдеров в гуи . Кстати и есть какие замечания и влияния настроек скорости возврата на базу и силы ветра? может случиться так, что к примеру , уменьшив скорость возврата, лишим возможности вернуться на базу против ветра?
- разводка “звездой” для снижения наводок, помех.
Звезда это, от бека идет питание на кроля, сонар и жпс, отдельными проводами? Получается через плату не желательно их питать?
- вынос компаса повыше, чтобы ничто в коптере не оказывало влияния.
А если основную плату поднять 4-5 см, будет тот же эффект? Не хочется отпаивать компас.
А если основную плату поднять 4-5 см, будет тот же эффект? Не хочется отпаивать компас.
Лучше между лучами вперед(назад, вбок), там безопаснее. А так да, эффект будет.
навая волна бэтатестеров)) кто-нибудь уже прошивал?
Аналогичный вопрос - кто уже пробовал прошивку 23ю, стоит с ней вобще ковыряться или оставляем 22ю?
Я поднял компас на 5 сантиметров на 22й, но ЖПС унитазит все же, калибровал в не самом благоприятном месте, на парковке возле работы. Возможно в поле это лучше производить но нет возможности.
Звезда это, от бека идет питание на кроля, сонар и жпс, отдельными проводами? Получается через плату не желательно их питать?
А если основную плату поднять 4-5 см, будет тот же эффект? Не хочется отпаивать компас.
Да отдельными проводами. Вот здесь подробнее rcopen.com/forum/f123/topic260089/6286
Тут основной момент - отсутствие возвратных токов по массе. Да и вообще, при такой схеме разводки, силовая часть неспособна повлиять по питанию на цифровую. Только такой методикой добиваются нормальной работы УМЗЧ. А там при несоблюдении таких правил из усилителя выйдет генератор или в лучшем случае “фонящий” усилитель.
Проверить влияние на компас нужно в ГУИ, при подаче газа, не должно быть изменения магнитного угла. Методика здесь - rcopen.com/forum/f123/topic260089/6329
Аналогичный вопрос - кто уже пробовал прошивку 23ю, стоит с ней вобще ковыряться или оставляем ?
Я поднял компас на 5 сантиметров на 22й, но ЖПС унитазит все же, калибровал в не самом благоприятном месте, на парковке возле работы. Возможно в поле это лучше производить но нет возможности.
Я прошил на 230, после 220. Разницы вообще не заметил. Сейчас стоит 230. Летаю на ней. Все функции в норме.
А насчет компаса, тут чудес не бывает. Оторвите платку компаса от основы, куда она приклеена. И наблюдая в ГУИ, определите, что именно сносит мозг компасу. Я наблюдаю металлический крепеж вокруг. Тут вообще по хорошему, все что может давать постоянное магнитное поле уносить подальше. Особенно буззер. Если рядом с компасом не будет магнитных элементов (болтики, металлические элементы и т.п) то смотреть по ГУИ влияние силовой разводки на плату компаса. Методика чуть выше.
Еще вот rcopen.com/forum/f123/topic260089/6251 про методику проверки компаса. Я думаю это исчерпывающая информация для решения всех проблем с GPS и компасом. ( Летит не туда, не висит на месте, Carefree не работает, летает кругами и проч. - решение проблемы одно)
Я поднял компас на 5 сантиметров на 22й, но ЖПС унитазит все же
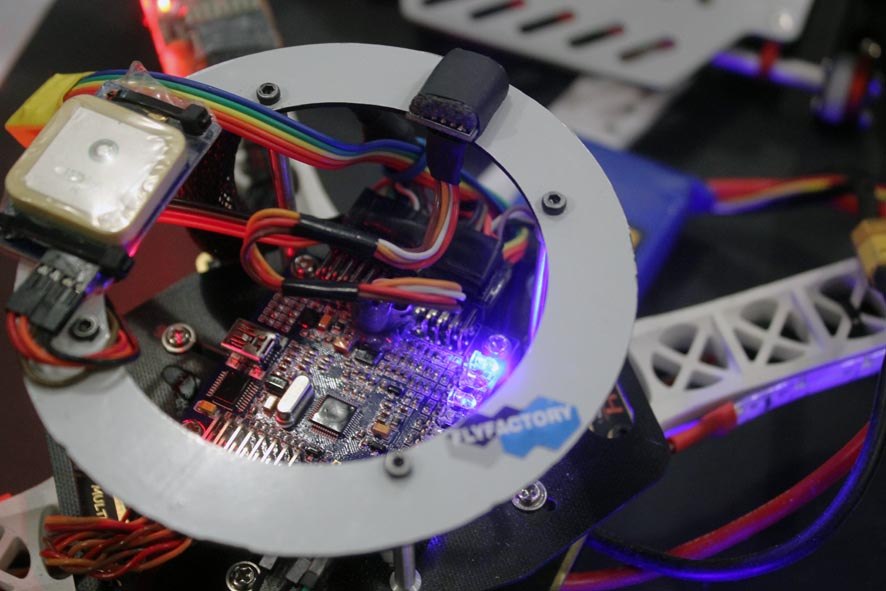
У вас плата компаса задом наперед стоит по отношению к основной плате? Или у меня что-то с глазами?
Влияние на компас силовой части и в поле видно, при даче газа начинается небольшое поворот по рудеру, я думал это нормально, а GPS при этом не работал напрочь. Сейчас плата компаса вынесена больше 15см от ближайшего силового провода, GPS заработал. У кого то и без этой процедуры работает, удачный конфиг в этом отношении, но надо проверять, в ГУИ на холостом ходу сразу видно пляшет компас или нет, если пляшет - GPS работать не будет 100%, спасибо Денису за наводку.
ЗЫ И все капризы прошивок ИМХО надуманы, кроме может 218-219, ищите проблемы в конфигурации. Получая правильные данные кроль работает довольно стабильно.
У вас плата компаса задом наперед стоит по отношению к основной плате? Или у меня что-то с глазами?
Кстати да. Неправильно ориентирована плата по отношению к главной плате.
Я прошил на 230, после 220. Разницы вообще не заметил. Сейчас стоит 230. Летаю на ней. Все функции в норме.
Денис, поделитесь настройками ползунков в ГУИ, базис и GPS, если что то крутили от дефолта. Баро и сонар не хотят работать, хотя сонар на прошлом кроле работал. Баро заизолировал от потоков, запоролонил, завтра летать поеду, может в ГУИ чуйку подкрутит?
Денис, поделитесь настройками ползунков в ГУИ, базис и GPS
Вот. Справедливости ради замечу, что все работало по дефолту. Я чуток подкрутил, легкий тюнинг.
У меня сонар изначально работал странно, пока я отдельный BEС не поставил. После этого автопосадка стала нормально работать как и удержание высоты на небольших значениях. Причем, вспоминая первые полеты с сонаром, (когда он то резко прыгал вверх, либо падал камнем вниз) я был готов кролика разбить молотком 😃. Но кролик тут был непричем. Как оказалось сонар очень критичен к питанию.
Я чуток подкрутил, легкий тюнинг.
Ни фига себе лёгкий тюнинг)))
Завтра с двумя сонарами полечу,старым и новым - буду по очереди пробовать, один, кстати, на подвес снизу поставил, раньше замечал - при начале движения по сонару коптер к земле стремится прижаться, оно и понятно, при наклоне показания увеличиваются.
Завтра с двумя сонарами полечу,старым и новым - буду по очереди пробовать
У меня стоит синий, 4-контактный, HC-SR04
У меня старый красный без названия, а с новым кролем пришел синий HY-SRF05.
У вас плата компаса задом наперед стоит по отношению к основной плате? Или у меня что-то с глазами?
Думаете это имеет значение? Я его все равно калибрую. Возможно неправ, неспорю. Как бы там ни было на удержание в позиции оно влиять не должно как бы. Попробую поднять выше, запас есть)
У магнитометра ориентация осей как на картинке. Сложно сказать, что там в прошивке. Но я экспериментировать с поворотом платы не стал. Ведь магнитометр трехосевой. А от работы магнитометра напрямую зависит как коптер будет удерживать позицию и возврат домой с помощью GPS.
Возможно калибровка поставит все на свои места, ведь у вас оси как бы инвертированы.Во всяком случае, можно понаблюдать за поведением коптера в двух положениях платы “правильно” и “неправильно”, и исходя из этого понять разницу.
Думаете это имеет значение?
Как бы там ни было на удержание в позиции оно влиять не должно как бы.
Думаю по осям с гироскопами завязано, калибровка - калибровкой, а по отношению осей таки может быть завязка. Стабилизация будет работать, в ней компас не участвует.
У магнитометра ориентация осей как на картинке. Сложно сказать, что там в прошивке. Но я экспериментировать с поворотом платы не стал. Ведь магнитометр трехосевой. А от работы магнитометра напрямую зависит как коптер будет удерживать позицию и возврат домой с помощью GPS.
Возможно калибровка поставит все на свои места, ведь у вас оси как бы инвертированы.Во всяком случае, можно понаблюдать за поведением коптера в двух положениях платы “правильно” и “неправильно”, и исходя из этого понять разницу.
Замечание принято, исправлюсь!
У меня GPS работает без вопросов, плата с компасом вынесена параллельно и перпендикулярно)))
Вы думает что перпендикулярность имеет значение?
Вы думает что перпендикулярность имеет значение?
Вы меня в тупик загнали, я вроде пошутил, но раз магнитометр трехосевой, то получается и по горизонту его надо с гирами совмещать.
В любом случае компас работает только на рудер и позицию. Если коптер держит направление, не факт что он будет держать позицию при ошибках компаса.
Если коптер держит направление, не факт что он будет держать позицию при ошибках компаса.
100% при ошибках компаса, будут ошибки при удержании позиции, возврате домой (+само собой Carefree). Если компас ловит ощутимые наводки, то удержание и возврат вообще работать не будут. У меня когда буззер висел в 5 см от платы, не было никакой удержании позиции - вместо этого коптер летал кругами с большой скоростью, стараясь врезаться в землю. Тумблер Возврат домой при этом заставлял коптер лететь куда-то в сторону китая.
Компас, это самая важная вещь для работы всего, что связано с GPS. Потому к проверке компаса нужно подходить также фанатично как к балансировке винтов. От этого зависит, не улетит ли коптер от вас вместе с камерой, и не убьет ли он кого по дороге.