Вопросы и Ответы по подбору комплектующих для коптеров

Интересно еще какие там fet, и кварц.
И еще они подозрительно похожи, но по токам не совпадают.
В Rcx скорее всего N/P fet. И без кварца.
A есть Саймон для силабсов? Я запутался.
У меня все Aфро с атмегой.
При этом есть Емакс с Саймоном, но там как раз Силабс.
Хотя, так-то, в афро тоже симонк - а там силабс.
С каких это пор там силабс? В Афро атмега.
площадь 8 кругов вдвое больше площади таких же 4-х, надеюсь, сомнений нет
В случае квадра имеем 4 ротора диаметром Х дюймов и в случае окты Х8 имеем 4 ротора диаметром Х дюймов, где Вы видите увеличившуюся площадь?
То, что эффективность нижнего винта снижается, известно. Обычно называют 10% - это немного.
Снижается эффективность не нижнего винта, а всего ротора… Соосная окта будет, в лучшем случае, иметь 90% эффективности квадра. У соосников выше статическая тяга, поэтому соосные схемы применяют для увеличения грузоподъемности при тех же габаритах и для повышения отказоустойчивости… Есть еще варианты, но они массово не применяются…
А кто нибудь видел, что внутри у этих регулей?
RCX обычно торгует продукцией DYS под своим брендом… Но и у DYSа ни слова о контроллере, зато упоминается прошивка и кварц…
А кто нибудь видел, что внутри у этих регулей?
У RCX написано “Suitable SimonK Firmware: tgy.hex”, получается, АТмега и P+N fets. Хотел их брать, но потом рискнул с Афро 12А v3.
Здравствуйте! Надумал собрать себе первый коптер, до этого дел с радиоуправляемой техникой особо не имел.
Немного почитал темы по сборке коптеров, понял что без помощи не обойтись.
Так что буду очень благодарен за совет.
Приглянулась такая рама: u.to/XWUqCA что скажите?
В продаже указанны рекомендуемые компоненты:
Пропеллер: поддержка 12 дюймов винт ( предложить APC1047 углерода / нейлон )
Двигатель : 4215 * 4
ESC : 20A ESC * 4
Батарея: 2200mHA батареи липо * 1 (общий полет ) ; 5000mHA батареи липо * 1 ( долгое время полета )
Можно ли ориентироваться на них или стоит посмотреть что иное?
Самая большая проблема с мозгами и аппаратурой радиоуправления…здесь пока вообще не пойму на что ориентироваться…
Можете что-то посоветовать для новичка за адекватную цену?
Так же возник вопрос устанавливаются ли различные датчики(гироскоп, gps и т.д.) отдельно или сразу идут на платах мозгов?
Спасибо!
Так что буду очень благодарен за совет
Рама дорогая и тяжелая… На первое время возьмите какой нибудь клон f450… Вот прямо так в поиске и смотрите…
Моторы очень похожи на рцтаймер 4215(3507), неплохие моторы за свои деньги, по отзывам владельцев, но многие их перематывают и меняют подшипники…
Винты… Настоящие АРС чисто нейлоновые, очень хорошие, но абы где не продаются… Так что, то что предлагают это АРС-стайл…)
В общем, вот Вам список тем, которые неплохо бы почитать… Чтобы сделать правильный выбор…
Соосная окта будет, в лучшем случае, иметь 90% эффективности квадра.
В этом случае их бы не существовало в природе. А у серьезных летунов встречаются довольно часто.
у серьезных летунов встречаются довольно часто.
Из-за грузоподьёмности!
Из-за грузоподьёмности!
Грузоподъемности откуда взяться, если все на 10% хуже обычного квадрокоптера, как тут рассказывают? Несвязуха-с, ИМХО
Увеличивается “момент” винта, считайте что вы подрубили винт в 2 раза большей площади.
все на 10% хуже обычного квадрокоптера
Не все хуже, а эффективность ниже… Граммов на ватт меньше… Условно, если у квадра 10 г/Вт, у Х8 - 9 г/Вт, но самих этих потенциальных ватт вдвое больше(моторов то 8), следовательно, грузоподъемность тоже больше.
Не все хуже, а эффективность ниже…
Эффективность - это и есть все.
но самих этих потенциальных ватт
Кто мешает поставить на квадрик вдвое более мощные моторы? И 10% не придется терять. Несвязуха-с…
Увеличивается “момент” винта
Что такое момент винта?
считайте что вы подрубили винт в 2 раза большей площади.
Коллеги так не считают.
😃 ппц какой то, просто ппц…аут…😁
И все это потому, что в калькуляторе соосных схем нету…😁 Ужас какой… Если бы не было калькулятора, мы бы не смогли летать… Ведь если в калькуляторе не написано “Взлет разрешаю”, то и не летит вовсе…😁
Может эти две ссылки помогут решить ваши вопросы?
engineoid.spb.ru/Russian/Helicopter/Index09.htm
ru.wikipedia.org/wiki/Соосные_несущие_винты
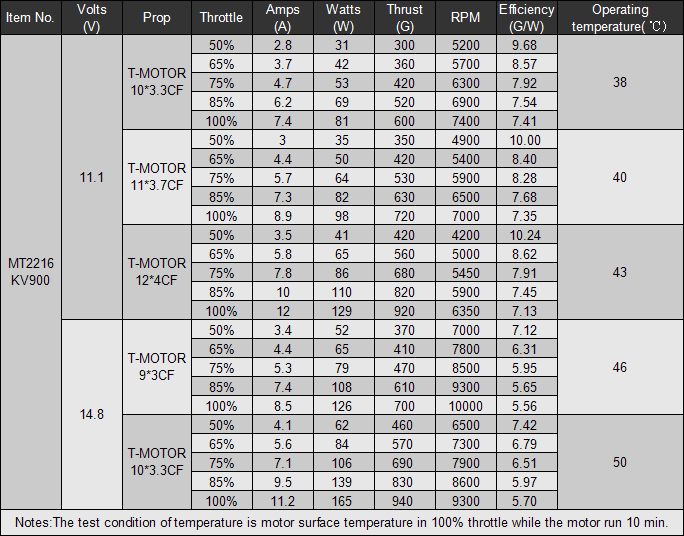
Рама dji f450. Двигатели t-motor 2216-11 900kv
naza-m v2, pmu v2, GPS, iOSD mini, datalink 2.4, tarot t2d, gopro h3, AOMWAY 5.8G 1w
акк 4Ач 3S
Вес 1700 грамм. Облегчить грамм на 80 можно убрав ноги, но тогда придется изобретать конструкцию типа ведра для стартовой калибровки.
До этого была наза первой версии без осд и даталинка от граундстейшена. Летало на 10 пропеллерах превосходно. Но и вес был меньше грамм на 150
Хочу поставить 12 пропеллеры, так как они на 3S обеспечивают на 50% 420 грамм тяги. Но пугает что зазоры между пропеллерами 2 см. Не великоваты ли для 450 рамы 12 пропеллеры?
Что такое момент винта?
Это его статическая тяга.
Коллеги так не считают.
Коллеги вам это пытаются по научному объяснить, я же по простому.
Площадь окружности винта и винт с лопастями увеличенной площади, это разные вещи.
Увеличение площади лопасти не увеличивет её эффективность, зато увеличивает статическую тягу винта.
НЕ ДЛЯ РЕКЛАМЫ!!!
Кто то сталкивался с такими акками? moshobby.ru/…/tiger-10000mah-22.2v-35c-lipo
Смущает цена-параметры. Отзывов не нашел.
Вот какой вопрос меня мучит по моторам Sunnysky V3508-16 700kv
их реальный тест , простите если было, не нашел
хочу грузить их по 600 грамм на мотор на 4s на 12" винтах
где то находил что реальная нагрузка на них 470 грамм
по тестам производителя на 12" 3S так и есть 470
на 4S -630 грамм все на 50% газа,
ещё по кальку как учесть полезную нагрузку , на 4S указано полезная нагрузка 2750 грамм, на 30% газа , по теории и тестам кто летает на таком сетапе все отлично, только параметры разнятся , поэтому очень хочется знать на что реально можно рассчитывать , по прикидкам думаю если откинуть 10% от заявленных параметром производителем будет в самый раз, верно думаю ?
Поможите люди добрые!
И все это потому
Все потому… впрочем, не знаю почему, я не психотерапевт…
Проделаем, однако, мысленный эксперимент. Имеется обычный квадрокоптер с полетным весом 1 кг, который расходует на висение 100Вт. Цифры условные, но эффективность хорошая 10г/Вт 😃 Приделываем к нему соосно еще 4 таких же мотора и таких же пропеллера. Вы, видимо, согласитесь, что, расходуя суммарно 200Вт, этот аппарат будет поднимать и будет висеть, имея полетный вес 1800г, 1700г, 1600г (конкретная цифра не важна, если потери 10%, то 1800). Но ведь не 900г? Если согласны, то это как раз то, о чем я говорю. Поскольку более-менее очевидно, что несоосный октокоптер с такими же восемью ВМГ при мощности 200Вт висел бы с 2 килограммами.
Это его статическая тяга.
Момент и тяга имею даже разную размерность. И еще вопрос: что такое статическая тяга? В чем ее отличие от динамической?
я же по простому.
Площадь окружности
Есть пословица: “Простота хуже воровства”. Это, видимо, тот случай. Вы демонстрируете порядочную безграмотность. Извините. У окружности нет площади - это линия. Площадь у круга. “Статическую тягу” недавно придумал Сергей Аваков. И, наконец, заметаемая площадь - это не площадь лопастей, а площадь круга, диаметр которого равен диаметру лопастей.
Хочу поставить 12 пропеллеры, так как они на 3S обеспечивают на 50% 420 грамм тяги. Но пугает что зазоры между пропеллерами 2 см. Не великоваты ли для 450 рамы 12 пропеллеры?
Если летать по кругу до одури, то конечно проблем нет, а если ставить FPV то места маловато.