Вопросы и Ответы по подбору комплектующих для коптеров

Гугл в помощь.
Это единственное хорошее видео с этого подвеса. Поэтому я попросил два примера. Второго такого нет! 😉 И гугл вам не поможет.
Из ваших слов, в апм /пиксе - некачественный кан?
Ха-ха! Там его просто нет, друг мой. Как-то вы не так воспринимаете слова.
Вы меня поражаете,
Вы меня тоже.
вот недавно наса выбрало для своего проекта коптеров именно пикс, а вы тут про некачественность…
Давайте вам ответит Алексей:
шурикус, не заблуждайте народ, из категории “обыскал весь инет, убедился что ни на цент дешевле ни у кого нет” с вероятностью 50 на 50 приходит плата которую нужно как минимум пропаять, прошить, решить проблемы с неверно указанной распиновокой. Но не у всех моделистов есть навыки и паяльная станция. И терпение чтобы выявить ошибки распиновки и косяки схемы.
Много раз сталкивался с тем что на продажу выставлялись заведомо косячные изделия, яркий пример: одно время на ебее продавалась печатная плата апм 2.5 с запаянными туда резисторами и кондерами, за доллар штука. по ошибке эти платы выпустили не 4х слойными а 2х, два внутренних слоя -отсутствуют. Кто то влетел на ошибке производства но решил не пустить в мусор а слить на ебее. Похожая ситуация сейчас px4mini, скоро в продажу попадет партия с косяками в разводке, оптовая цена за такой пиксавк у производителя 20 долл, при том что у него же изделие с перевыпущенной платой будет стоить от 65
Это про те платы на которых все летают. Или у вас фирменная?
Или уже забыли про горелые стабы, неправильную разводку питания, и прочую кривоту от разработчиков 3DR?
ПРУФ плиз, а не слова
Вы читайте форум внимательно, совсем недавно я выкладывал цитату Алексея про компас. Или вам нужен пруф, что CAN лучше I2C - тогда я вас пошлю в ваш любимый гугл.
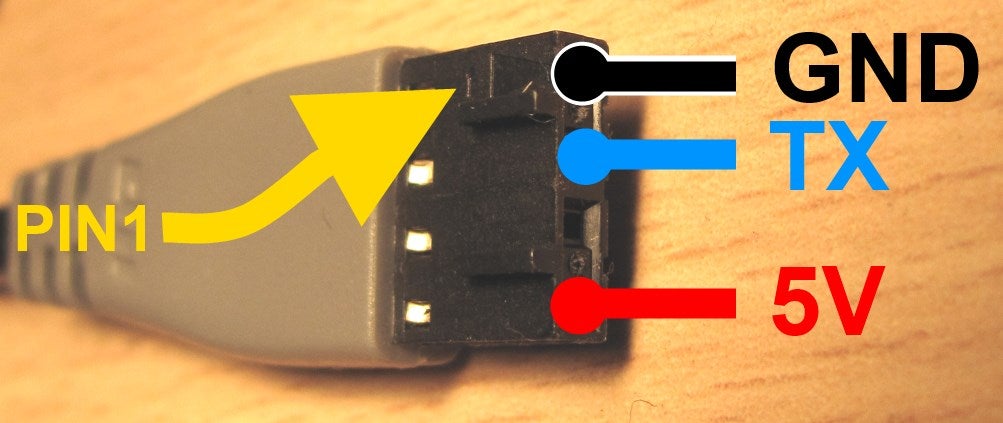
К Вашему сведению CH и CL, как раз, дифференциальная пара и есть
Так то на авто это как защита от помех и ошибок, несут один общий сигнал и они свиты.
А Алексей, я так понимаю, хотел сказать, что у назы это просто общие на всех rx и tx.
планшет или ноут на винде стоит всяко дешевле, чем остаток от покупки апм, вместо назы
Надеюсь вы понимаете как устрашающе это звучит в ушах новичка (а именное ему мы что то рекомендуем)
Смотрел ютуб, купить телефон, поставить прогу, повесить телеметрию, красота! Да я пол часа потратил что бы нарынь Дроид планер (вот только автор ролика 2 рекомендует) Вот вам и телеметрия, в комп прогу поставил, и видео смотрел, это самому что бы сделать нужно пошаговую видео инструкцию ( ок, я нуб) А назовскую скачал, поставил галочки не трогая пиды, и в небо. Приобщился, начал что то понимать, давайте покрутим! ))
А вообще пора всех банить…)) шумите шумите.
можно подробнее???
О чем поподробнее? О фильтрах Калмана? Так почитайте на тематических ресурсах, что это такое и как работает… Я не математик, чтобы в двух словах объяснить…
Вопрос не в алгоритмах, а в конечном результате
Еще раз, для невнимательных…) Об алгоритмах: Более мощный процессор назы, работающий на более высокой частоте, и гораздо бОльшее количество памяти позволили применить фильтры Калмана в алгоритмах стабилизации ИЗНАЧАЛЬНО!!!
В АРМ это до сих пор не работает, появилось в пиксе, но Козин говорит, что работает плохо, хотя есть и другие отзывы…) О конечном результате: Если бы наза не была на момент появления лучшим из доступных контроллеров, она бы не завоевала такую популярность, несмотря на высокую в своем классе цену… Это, как бы, намекает на хороший конечный результат…) Не так ли?
Из ваших слов, в апм /пиксе - некачественный кан?
Не скажу какой в пиксе, в АПМ его вообще нету… У назы за CAN отвечает трансивер от TI(texas instruments), не помню точно какой, кажется этот… Не факт, что в таком корпусе…
а что мешает апм настроить и летать?
Всего два слова… “апм настроить”…) Назу надо только к раме приклеить…)
планшет или ноут на винде стоит всяко дешевле, чем остаток от покупки апм, вместо назы
Где??? Срочно дайте ссылку на ноуты за 30-50 долларов…) Если серьезно, приличный АРМ сейчас дороже назы…)
99% причин улетов - идиотизм
Ага, значит наза уже как бы и ни при чем…)
ПРУФ плиз
CAN-шина работает на скорости 1 мегабит, имеет двойную, а то и тройную избыточность, адресацию и так далее… В отличие от обычного UART
что у назы это просто общие на всех rx и tx
Блин, я устал уже…) Ну нету у назы rx и tx… НЕТУ!!!
Вот та же ссылка, посмотрите хоть картинки, если читать лень/некогда… www.rcgroups.com/forums/showthread.php?t=2135241
Тут я внезапно понял, как это смешно звучит!
Они как раз нигде слово CAN и не используют. Это у вас совсем фантазия разыгралась в охоте на ведьм. Для их целевой аудитории писать, что у них шина CAN - это полный маркетинговый провал!
вы бы сначала хотябы между собой с Сергееем разобрались и договорились кан у вас или не кан прежде чем ардукоптерщиков чморить.
один говорит что кан и диференциальная линия есть, второй говорит что по одной линии приоритеты а по второй данные, потом оказывается есть дифференциальная линия,
и в конце концов термин CAN вообще не не упоминается в продуктах DJI
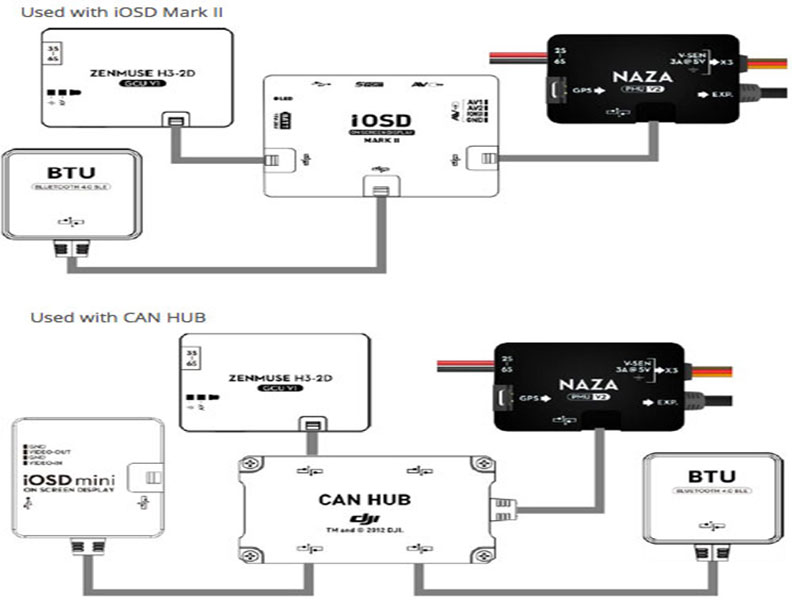
и картинку эту я за эти полчаса нарисовал
вы бы сначала хотябы между собой с Сергееем разобрались и договорились кан у вас или не кан
А нам пофигу, как оно называется…) Главное - работает хорошо…
прежде чем ардукоптерщиков чморить
А никто из нас и не говорил, что АРМ - деревянная игрушка…)
ок, я нуб
Но тем не менее рассуждать о “серьезности” мозгов, и что то советовать это вам не мешает, так?
картинку эту
Если всё именно так, как вы нарисовали, то где концепция кан шины?
Вот та же ссылка, посмотрите хоть картинки
Ну вот нашёл картинку в той теме:
Но тем не менее рассуждать о “серьезности” мозгов, и что то советовать это вам не мешает, так?
Не мешает, от этого и танцуем!Без покупки ноута,планшетника,без многотомного изучения для 1 полета.
Если всё именно так, как вы нарисовали, то где концепция кан шины?
Ну вот нашёл картинку в той теме:
Ну, строго говоря, у назы последовательный порт есть (в самом контроллере), но используется он только для связи с PMU, в котором стоит CAN-преобразователь от TI. Именно поэтому вся периферия подключается к PMU. Ещё GPS также работает по последовательному порту. Во всех других местах - CAN.
Не мешает
Да кто бы сомневался, зачем что то изучать, читать…если можно перейти сразу к следующей ступени, советовать и критиковать, правда? 😃
Кстати, ноут и планшетник это я так монимаю то без чего арду не летает, так(то есть чтоб настроить это необходимые вещи с вашей точки зрения)?
А с тем же фантиком как быть, без планшета например, я вот заказал себе фантик и пришлось к нему планшет брать яблочный, это норм или нет(или это норм. потому что это продукт ди джи ай а не какой то там недоконтроллер)?
Я не собираюсь доказывать, что APM идеален. Просто не надо пугать всех новичков и обещать им полгода настроек, прежде чем они смогут летать
тут смотря кого считать новичком и смотря какая подготовка у этого новичка, я летал раньше на самолётах только т.е опыт в моделизме был + я технический человек и по профессии и по образованию, первый мой контроллер коптера апм 2.5.2, после чтения мануалов и сборки коптера полетело сразу, хорошо или плохо не знаю, коптер был первый и сравнить не с чем, летал я на нём около года, потом решил попробовать назу когда появился совместимый ГПС, итог хоть я и люблю опенсорс, НО АПМ давно продан.
По поводу сложности вхождения, наза явно проще! воткнуть пару разъёмов и откалибровать, это явно проще чем изучить всё что касается апм, для тех кто в теме и технически подкован всё равно что настраивать
А вообще выбирая контроллер надо чётко понимать для чего тебе коптер, если просто полетать, фпв или поснимать наза лучше,проще.
Если как творчество, что то сделать самому и больше разобраться в том как это работает, то может и лучше АПМ, но это мало кому надо
чем изучить всё что касается апм
Что вы там изучали, без подколок, я не совсем понимаю что там изучать, код чтоль писали и собирали потом?
Для того чтоб арду полетел нужно пройти визард из 5 пунктов(выбор типа рамы, калибровка компаса, акселя, РУ), и все, оно летит, даже на стоковых пидах…Если дальше есть желание вглубь то да, можно, но чтоб летало достаточно визарда ну и пиды(по необходимости, для типовых конфигов есть предустановки + автотюн)…
Ну режимы надо прочитать чему соответствуют, как проводочки воткнуть, ну это везде так, на назе с этим чуть проще но разницы большой нет…
Я понимаю там какой нить аутоквад, можно сказать да, с ходу не полетит…но тут то что?
и все, оно летит, даже на стоковых пидах
Кстати да, в стабилайзе на любых пидах летает, только в лоитере переворачивается.
только в лоитере переворачивается.
Вы же писали что у вас из за срыва синхры кувыркается, каким тут боком арду то?
Если это про тот конфиг что с лопатами, типа долголет который вы собирали по ролику с ютуба, то он на назе не полетел бы вообще, скорее всего…но это не говорит о том что наза хуже или лучше, там не в том проблема…
Что вы там изучали, без подколок
Для того, чтобы полететь я ничего не изучал, кроме схемы подключения и предполётной подготовки.
Но это не значит что этого хватит всем, НО чтобы оно не просто полетело, а приносило радость от полёта, надо разобраться и вообще понять что нужно решать проблему с вибрациями а для этого
- как включить логи
2)Понять что есть куча вариантов логирования
3)определится какой тип нужен тебе
4)Найти как в логах смотреть эту вибрацию
5)узнать какой уровень допустим
6)придумать раму и систему демпфирования которая это обеспечит
и далее…
7)Разобраться что такое пиды и как их подбирать - понять немного теорию электромагнитных помех от силовых проводов
9)Узнать о существовании компасмота, понять как его сделать правильно
10)исходя из этого определится куда засунуть ГПС + маг
11)узнать о том как откалибровать регули с помощью АПМ
12)установить средний газ
или вы считаете что это всё очевидно и все это знали, до того как стали увлекаться коптерами ?
Я не утверждаю что это очень сложно и невозможно найти, но это надо найти и понимать что именно искать
а кто бы сомневался, зачем что то изучать, читать…если можно перейти сразу к следующей ступени, советовать и критиковать, правда?
Нет не правда, все пытаетесь подковырнуть?Не выйдет. Разговор о том что летит с коробки. О чем я и написал.Критика?Где??? Вы сами указали то что я знал и почему не взял арм
Кстати, ноут и планшетник это я так монимаю то без чего арду не летает, так(то есть чтоб настроить это необходимые вещи с вашей точки зрения)?
А с тем же фантиком как быть, без планшета например, я вот заказал себе фантик и пришлось к нему планшет брать яблочный, это норм или нет(или это норм. потому что это продукт ди джи ай а не какой то там недоконтроллер)?
Да вы можете что угодно взять Роман, вы вопрос точно читали?
то он на назе не полетел бы вообще, скорее всего…
не приписывайте не точных данных. слово бы тут не уместно, это все ваши догадки.
Это очень сложно…
2)Понять что есть куча вариантов логирования
Целых 5
3)определится какой тип нужен тебе
ок
4)Найти как в логах смотреть эту вибрацию
Выбрать “vibration”, не очевидно, согласен…
5)узнать какой уровень допустим
Написано в мане, не очевидно, согласен, зачем ман читать?
6)придумать раму и систему демпфирования которая это обеспечит
Придумали раму и ситему демпфирования? Позвольте попросить показать “вашу” придуманную раму, интересно что вы там придумали такое что только на ней полетело?
7)Разобраться что такое пиды и как их подбирать
Сложно, очень…только на арду, только хардкор
- понять немного теорию электромагнитных помех от силовых проводов
Это лол, просто в цитаты…😃
9)Узнать о существовании компасмота, понять как его сделать правильно
Я до сих пор летаю без оного, все ок, что я делаю не так?
10)исходя из этого определится куда засунуть ГПС + маг
Туда же куда и на назе, очевидно, на мачту(ну или есть более экзотические варианты), разобрались таки?Молодцом…
11)узнать о том как откалибровать регули с помощью АПМ
Можно и без помощи, но опять же только на арду регули нужно калибровать…
12)установить средний газ
Ну ок, на правильно собранном коптере не требуеться…либо долголеты либо перегруз\недогруз
Нет не правда, все пытаетесь подковырнуть?
Конечно, на почве личной интернет неприязни это все…вы все делали правильно, советовали, делились опытом про “серьезные мозги” а тут пришел нехороший человек, невзлюбил вас очевидно, от зависти наверно, к вашим прозорливым советам, сам то не может так разъяснить четко, ну и пошло-поехало…😃
Вы же писали что у вас из за срыва синхры кувыркается
Там он кувыркался пока не встретится с планетой. А здесь кувыркается в лоитере из за немного неподходящих пидов:
И это, про какое видео с лопатами вы говорите?
И это, про какое видео с лопатами вы говорите?
Я помню что у вас были проблемы с тем что коптер кувыркался(в лоитере когда по рудеру рулите), коптер долголет с относительно слабыми движками и лопатами что типа 17(точно я не помню естественно), сетап из серии “совсем на пределе”…в арду теме долго выяснялось почему он у вас кувыркается, логи шмоги и т.д., я тогда предположил что либо наводки при рулении по рудеру либо срыв синхы…вы позже сказали что это срыв синхры вродь был…
Я предположил что сейчас вы про этот аппарат, ну и соответственно так как сетап “сильно на пределе” оно как бы по умолчанию без серьезной епли не полетит…наза может бы и вообще не полетела, не любит насколько знаю оная подобные сетапы…
Я помню что у вас были проблемы с тем что коптер кувыркался(в лоитере когда по рудеру рулите)
Нет, он кувыркался и падал в автотюне на первых секундах, а здесь не успевает сообразить, что ему делать. И кстати это он кувыркается с автотюнеными настройками. И винты 12, а моторы 4006 KV680.