PIXHAWK PX4 Autopilot еще одна летающая железка

Провод был надет.
Про быстрее не могу сказать, не обратил внимание.
А где сохранение находится? Есть отдельная кнопка? При закрытии Configuration view предлагает сохранить, жал да.
Ну то вы в RATE заходили, с 1 на 5 поменяли, Send нажали, потом надо в CFG перейти, там должно быть выбрано сохранение, тоже Send нажать.
Сделал как вы написали. Все равно не хочет, видимо связано с тем, что подключаю gps через пикса с помощью mavserial pass по tcp://localhost:500 .
Подключаю, как написано на оф. сайте. Кто-нибудь так конфигурировал GPS?
Ура!
Copter: version to 3.4-rc2
Прошил - моторы в разнобой стартуют…
С mot_pwm_type = 2 калибруется только верх, перевод стика вниз ничего не делает. С mot_pwm_type = 1 калибруется нормально, работает нормально сразу после калибровки, но после арминга точно также в разнобой.
И это не просто разнобой, а они входят в калибровку.
На 3.4-rc1 такой фигни не было, но её уже нигде не достать =(
но после арминга точно также в разнобой.
Видно до ура все же далеко. Стабильной пока идет 3.3.3.
На 3.4-rc1 такой фигни не было, но её уже нигде не достать =(
А в папке latest? Там вроде пишет просто 3.4.0.
На 3.4-rc1 такой фигни не было, но её уже нигде не достать =(
Во, спасибо! Прошил от 29 мая, откалибровать хоть и не получается, но хотя бы после нажатия на кнопку регули почти одновременно пропискивают. На рк2 это продолжается в течение 5 минут после арминга даже.
Приветствую! Возникла проблема на квадрокоптере c Pixraptor, он перестал реагировать на нажатие safety switch и соответственно не армится. Основной лед горит зеленым, а кнопка двойным морганием и длиной паузой. В инете ясный ответ не нашел, подскажите куда рыть?
Основной лед горит зеленым, а кнопка двойным морганием и длиной паузой.
Поправлю: основной лед МИГАЕТ зеленым.
подключите по телеметрии к мишен планеру и посмотрите какое предупреждение на экране в момент попытки арминга. кнопку безопасности можно отключить в параметре
И снова я с вопросом.
Калибровку регулей победил, газ в нижнем положении, но в МР шкала газа перевернута (см скрин. значение 1058), в параметрах фаилсэйф значение 1942. При настройке фаилсэйф по инструкции зеленой шкалы нет и значение около 970. Это нормально? 😃
подключите по телеметрии к мишен планеру и посмотрите какое предупреждение на экране в момент попытки арминга. кнопку безопасности можно отключить в параметре
Спасибо за совет, кнопку отключил, армится нормально в stabilize. При переключении в режим loiter или rtl сразу начинает громко пищать и не переключает, хоть и показывает 3д фикс. Еще проблема с терминалом вылезла, при попытке подсоединиться лезет билиберда. Погуглил вроде у народа тоже самое бывает, что делать так и не понял. Подскажите кто сталкивался с подобным:(
Еще проблема с терминалом вылезла, при попытке подсоединиться лезет билиберда. Погуглил вроде у народа тоже самое бывает, что делать так и не понял. Подскажите кто сталкивался с подобным:(
Убедитесь, что параметр CLI_ENABLED=1
При переключении в режим loiter или rtl сразу начинает громко пищать и не переключает, хоть и показывает 3д фикс
А HDOP меньше 2, или параметра GPS_HDOP_GOOD?
Если включен «забор» (fence), то без этого не заармится.
Народ,отчего в Миссион Планер в процессе калибровки,нет реакции на верно настроенные тумблера на Турниге? Flight Modes,во время перещёлкивания,никак не реагирует ни на что.На остальное реакция есть. И отчего появляется надпись красная,Bad AHRS ?
У меня эта надпись, когда по gps нет фикса или hdop больше 2,5.
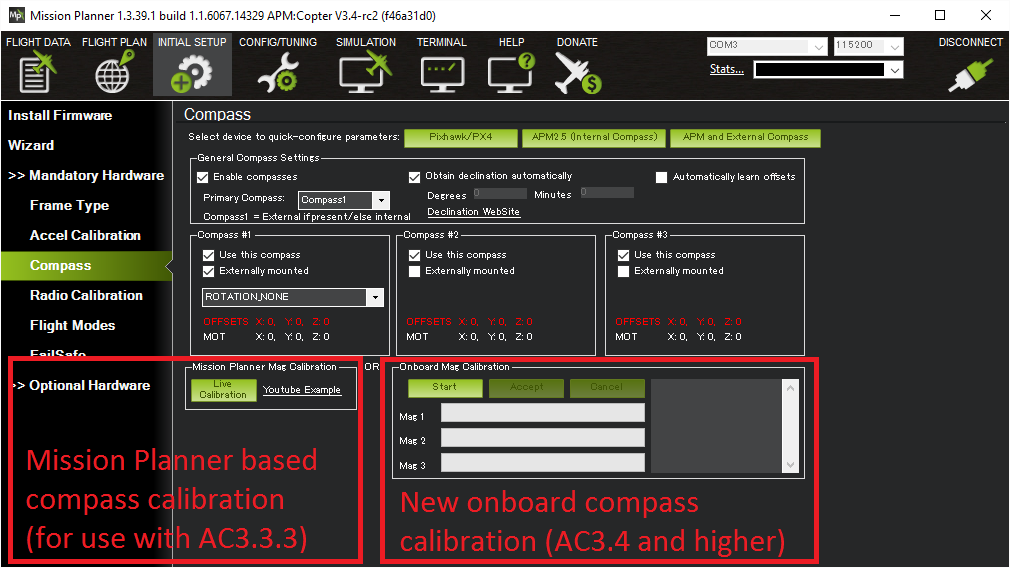
rmackay9 выложил инструкцию на дискусе:
Я как пробовал по второму способу - там цифры на десятки отличаются от обычного способа.
Ура!
Copter: version to 3.4-rc2
Да, ура. Легко армится на стальной палубе, ведет себя стабильно, сама подстраивает ховер. Квадр с пиксом лайт и подвесом на Шторме32. Отработка взлета-посадки в стесненных условиях. YDXJ0013-турб
Уважаемые коллеги, стал обладателем Pixhawk клон, собираю квадрокоптер впервые. Собрал раму и установил двигатели 2212 и ESC 30А Simonk. Прошил коптер по инструкции. Армится, но при попытке взлета начинает крениться вроде на левую сторону. Несколько раз калибровал ESC, копмас, гироскоп и одна и таже ерунда, компас и GPS внешний Ublox Neo N8M. Может компас не правильно калибрую ибо говорят, что может компас на плате быть перевернутым. Помоготи начинайке. Аппаратура Radiolink AT9.
Типичная ошибка при сборке - неправильное подключение моторов. Из-за этого точно переворачивается.
В чем может быть ошибка? подключал по схеме, все проверял. Вращение моторов, подключение моторов к Пиксу, ткните носом.
Вот схема, я по второй подключился.