PIXHAWK PX4 Autopilot еще одна летающая железка

подключите по телеметрии к мишен планеру и посмотрите какое предупреждение на экране в момент попытки арминга. кнопку безопасности можно отключить в параметре
И снова я с вопросом.
Калибровку регулей победил, газ в нижнем положении, но в МР шкала газа перевернута (см скрин. значение 1058), в параметрах фаилсэйф значение 1942. При настройке фаилсэйф по инструкции зеленой шкалы нет и значение около 970. Это нормально? 😃
подключите по телеметрии к мишен планеру и посмотрите какое предупреждение на экране в момент попытки арминга. кнопку безопасности можно отключить в параметре
Спасибо за совет, кнопку отключил, армится нормально в stabilize. При переключении в режим loiter или rtl сразу начинает громко пищать и не переключает, хоть и показывает 3д фикс. Еще проблема с терминалом вылезла, при попытке подсоединиться лезет билиберда. Погуглил вроде у народа тоже самое бывает, что делать так и не понял. Подскажите кто сталкивался с подобным:(
Еще проблема с терминалом вылезла, при попытке подсоединиться лезет билиберда. Погуглил вроде у народа тоже самое бывает, что делать так и не понял. Подскажите кто сталкивался с подобным:(
Убедитесь, что параметр CLI_ENABLED=1
При переключении в режим loiter или rtl сразу начинает громко пищать и не переключает, хоть и показывает 3д фикс
А HDOP меньше 2, или параметра GPS_HDOP_GOOD?
Если включен «забор» (fence), то без этого не заармится.
Народ,отчего в Миссион Планер в процессе калибровки,нет реакции на верно настроенные тумблера на Турниге? Flight Modes,во время перещёлкивания,никак не реагирует ни на что.На остальное реакция есть. И отчего появляется надпись красная,Bad AHRS ?
У меня эта надпись, когда по gps нет фикса или hdop больше 2,5.
rmackay9 выложил инструкцию на дискусе:
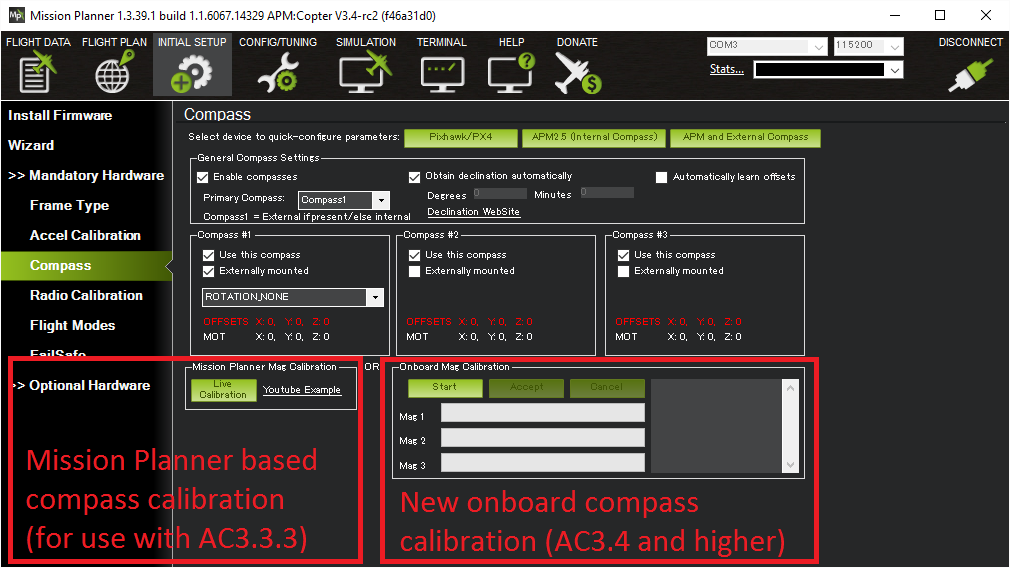
Я как пробовал по второму способу - там цифры на десятки отличаются от обычного способа.
Ура!
Copter: version to 3.4-rc2
Да, ура. Легко армится на стальной палубе, ведет себя стабильно, сама подстраивает ховер. Квадр с пиксом лайт и подвесом на Шторме32. Отработка взлета-посадки в стесненных условиях. YDXJ0013-турб
Уважаемые коллеги, стал обладателем Pixhawk клон, собираю квадрокоптер впервые. Собрал раму и установил двигатели 2212 и ESC 30А Simonk. Прошил коптер по инструкции. Армится, но при попытке взлета начинает крениться вроде на левую сторону. Несколько раз калибровал ESC, копмас, гироскоп и одна и таже ерунда, компас и GPS внешний Ublox Neo N8M. Может компас не правильно калибрую ибо говорят, что может компас на плате быть перевернутым. Помоготи начинайке. Аппаратура Radiolink AT9.
Типичная ошибка при сборке - неправильное подключение моторов. Из-за этого точно переворачивается.
В чем может быть ошибка? подключал по схеме, все проверял. Вращение моторов, подключение моторов к Пиксу, ткните носом.
Вот схема, я по второй подключился.
Пропы могли неправильно поставить. Или контроллер разместить не по стрелке
Армится, но при попытке взлета начинает крениться вроде на левую сторону.
Так Вы в итоге взлетели или нет?
Взлетать в стабе надо резко, а потом уже смотреть в полёте куда его тянет.
Спасибо, что помогали, разобрался. К пиксу не правильно подключил один из регулей. Взлетел и приземлился, завтра буду тестить полетные режимы.
Привет. Я недавно подружился с Pixhawk, всё супер, мне мой 450й нравится больше 250 на SPRacingF3. Особенно понравился автотюнинг пидов и режим drift.
Только одно не работает - управление подвесом Quanum Q-2D (Walkera G-2D). Я всё подключил вот так, правильно, без ошибок:
Повесил управление на крутилку на пульте. Но наземная станция и логи говорят, что на RC9 output (AUX1) ничего не подаётся, 0, а должно быть что-то в районе 1200-1800.
Подвес проверял сервотестером - наклоняется как надо.
Есть расхождение в инструкции и на самом деле, правда я уже все эти варианты перепробовал. Раньше ты просто выбирал канал для Tilt - RC9, например, а теперь ещё и нужно знать тип подвеса, и там нет моего.
Подскажите, что я не так делаю.
И ещё попутно. Вот здесь прошивки лежат. Все одной датой, но есть v1, v2, v4. Это для чего? При обновлении с 3.3.3 до 3.4 настройки сбиваются, сбиваются, но не все или нет?
В свою очередь могу помочь с Sbus телеметрией, это намного удобнее и дальше, чем телеметрия на экран ноута или мобилки.
Подскажите, что я не так делаю.
Тоже использую такой же подвес. Взял выход PWM с 9 канала приёмника -> подключил на вход PIT контроллера подвеса и имею счастье.
Настройка подвеса. С 9 каналом пикса(AUX1) я пока не видел, что бы кто-то разобрался…
Подвес тарот т2д подключал согласно инструкции на официальном сайте ардукоптера, все прекрасно работает. Если на выходе с пикса тишина , проверяйте настройки.
А почему на подвесе к aux подключили, может в pitch надо?
Проблема такая, при взлете квад тянет вперед и немного в сторону. Что нужно отстроить и как?
Спасибо
Проблема такая, при взлете квад тянет вперед и немного в сторону. Что нужно отстроить и как?
- выставить цт по центру тяги рамы
- тримировать горизонт. т.е. выставить горизонт полетника в плоскости тяги моторов.
- выставить соосность моторов
- выставить цт по центру тяги рамы
- тримировать горизонт. т.е. выставить горизонт полетника в плоскости тяги моторов.
- выставить соосность моторов
А можно для начинающих подробнее как это сделать 😉
Или ссылку на описание.
Спасиб
Скажите, есть ли разница или какие то сложности при использовании Пикса на раме H-образной или все тоже самое что и на раме Х-образной?