PIXHAWK PX4 Autopilot еще одна летающая железка

судя по времени (19:38-19:42) , это был этот лог :
Log File C:\Users\User\Documents\Mission Planner\logs\QUADROTOR\1\2020-08-30 19-38-41.log
Duration 0:03:04
…
Test: Empty = FAIL - Empty log? Throttle never above 20%
коптер от земли не отрывался (?)
Отрывался. Но не надолго. В этой попытке взлета он уже примерно на 20-25 % стика газа пытался взлететь. А обычно взлет на 50 %. И я не стал испытывать судьбу. Прекратил попытку до выяснения обстоятельств.
Причиной могло быть то , что до это вы взлетали в AltHold/Loiter , а тут в Stab/Acro.
от этого и реакция на газ другая и “управляемость хуже”.
В логах должно быть видно полетный режим.
Комрады, спасайте!
Случилось ни с того, ни с сего… На пиксе1 радиолинковском пропадает GPS (No GPS). Может появиться, потом так же внезапно пропасть. Прошивка- arducopter 4.0.4 (крайняя). GPS модуль радиолинковсий SE100 (M8N), подключал через apm к MP и через uart к u-center- всё ок! Rx и Tx не перепутаны, провода пробовал разные. Разъёмы пропаивал, спиртом контакты промыл…
Есть мысли?
Радиолинковкие пиксы унылое дерьмо! Выходят из строя. У меня на 2.4.8. тоже пропал компасс, причина сдох микроконтроллер, которого не заменить.
Разъем скорее всего шалит. Промывка не помогает как правило.
Разъем скорее всего шалит. Промывка не помогает как правило.
Х.з… пропайка, зачистка пинов наждачкой 1200 до блеска котовых яиц, промывка… всё прозванивается от пятачков на пиксе до контактов разъёма на плате gps модуля. Сегодня ночью на сон грядущий воткнул ещё один gps в сериал 4/5- и вуаля, вместо No GPS No Fix! Отключил второй gps- первый работает. Похоже, пикс у меня не может разобраться, с каким жпсом ему работать. Сегодня покурю настройки жпс и сериалов, заодно и осциллографом гляну, что на шинах творится…
Разъем скорее всего шалит. Промывка не помогает как правило.
Так и оказалось.
Всем доброго времени суток. Перешел на пикс 4.6.7 plus с апм есть вопросы. Купил только голый контроллер - остальное будет с арм или самосбор.
Первый.
Насколько я понимаю в кнопке светодиод и просто кнопка (без фиксации). Кто-то может дать схему “кнопки безопастности” (SWITCH). В инете нашел распиновку порта. По схеме там три контакта
1 (red) VCC +3.3V
2 (blk) !IO_LED_SAFETY GND
3 (blk) SAFETY GND
По схеме принципиальной вот так


Чего-то не пойму что-куда подключается (кнопка-диод). По идее 1-2 диод, 1-3 кнопка? Тогда получится что кнопка “светится” в режиме дизарм?
Спасибо за ответ. Если тема поднималась - подкинте ссылку.
Тогда получится что кнопка “светится” в режиме дизарм?
Кнопка светится - моторы будут крутиться после арма 😃
Кнопка, на самом деле, не нужна никому
(кроме тех кому она нужна, конечно)
Кнопка имеет три вывода. первый справа - +3,3 вольта, потом две земли. Светодиод весит на средней земле. При нажатии кнопки +3,3 вольта и крайняя земля (слева первый провод - КЗ). Кнопку можно убрать програмно. Я убычно оставляю. Весьма полезная вещь. Обычно Пикс идет с этой кнопкой. Без нее - не встречал.
Косте и Роману спасибо. Пикс взял б/у и пустой (только контроллер). В принципе я так и думал - замыкание сигнального вывода на землю. Но по схеме (ту что нарыл) не увидел подвязки опорного на ноге проца, вот и побоялся тупо +3 садить на землю 😃
Еще вопрос. Есть регули BiHeli-32. там есть вывод телеметрии. На пикс это можно вывести (телеметрию ESC)? Не наю зачем мне это пока, но раз есть такое - чего не подключить.
Насколько я знаю, Пикс не поддерживает данный тип телеметрии. Во всяком случае при своей родной ардупилотовской прошивке.
В последних прошивках можно, нужен свободный UART порт. У меня оно как то нестабильно работает, через время отваливается. Но это не на пиксе а на матеке 765
Свободный порт serial 4/5 на пиксе есть. Он подойдет? Там 5в питание идет. И на OSD нет же оборотов двигателя у mini/micro OSD. В Матеке то есть, это да.
С телеметрией в общих чертах понятно. Бум пробовать. Пока запускаю-собираю на базе железа оставшегося от арм.
Вопрос по модулю GPS задам здесь ибо это больше пикса касается.
Модуль M8N с двумя разьемами (GPS и I2C ). Пока падключу к таким же на пиксе. Но хочется минимизировать разьемы.
Хочу загнать их в один разьем, наподобие GPS от пикса
Ну а ноги компаса кинуть на 4 и 5 ноги GPS порта, освободв разьем I2C на “будущее”
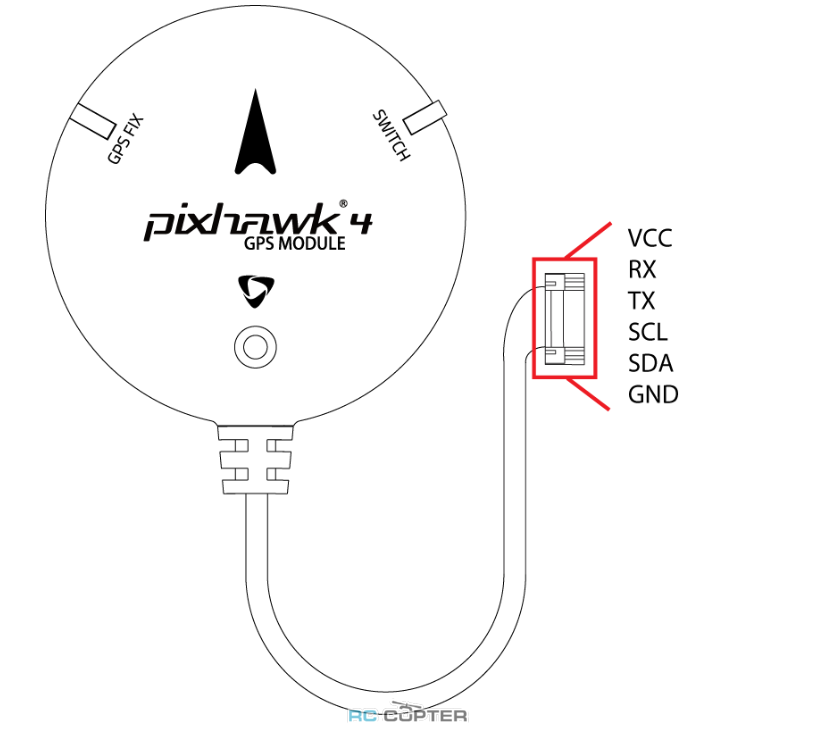
GPS port,
Pin Signal Volt
1 (red) VCC +5V
2 (blk) TX (OUT) +3.3V
3 (blk) RX (IN) +3.3V
4 (blk) CAN2 TX +3.3V
5 (blk) CAN2 RX +3.3V
6 (blk) GND GND
Получится такое?
Я не вижу смысла в таких переделках. Шина i2c работает с адресами. Поставьте разветвитель и все. И что хотите подключить? Проблемы начинаются когда датчиков полно воткнуть собираетесь. Так кучу лидаров например. А так для всего там места хватит. Да и в настройках порта нет компаса вроде.
Роман, спасибо. Спросил ради интереса.
Пока подключил GPS по схеме
1 (red) VCC +5V
2 (blk) TX (OUT) +3.3V
3 (blk) RX (IN) +3.3V
6 (blk) GND GND
Просто перебросил провода с 5 пин. колодки на 6 пин.
По i2c (компас я понимаю) работает. По GPS не определяет подключение. Буду читать ветку - может что найду, если раньше не подскажут.
ПС. В пиксе компас совсем не так калибруется как в арм, буду разбираться, ибо орет что не калиброван…
Компас в пиксе калибруется в зависимости от прошивки и программы из которой это делается. Но принцип тот же, разница там незначительная. Ориентацию не указываете(как в APM flip 180 и подобное). Просто указываете что Пикс. А дальше крутите по всем осям. Укажите какой компас основной. Обычно это выносной. Колодка просто перекидывается на 6 дырочную. И все. Вместо одной свободной дырки будет 2. Порядок проводов НЕ МЕНЯЕТСЯ. Схема распиновки ardupilot.org/…/common-pixhawk-overview.html Что значит не определяется подключение? В какой порт воткнули GPS? В каком режиме этот порт? Может он настроен не на GPS?
По GPS не определяет подключение.
Mission Planner -> Config -> Full Parameter List -> param: ser X… (порт куда подключен модуль gps) проверить скорость SERIAL X_BAUD (115., в какой-то из крайних beta прош., если видит gps, сам выставляет 256) и протокол (5= gps)
Я, кстати обнаружил что есть протокол для телеметрии с ESC. Вопрос как это все работает.