PIXHAWK PX4 Autopilot еще одна летающая железка

Разъем скорее всего шалит. Промывка не помогает как правило.
Так и оказалось.
Всем доброго времени суток. Перешел на пикс 4.6.7 plus с апм есть вопросы. Купил только голый контроллер - остальное будет с арм или самосбор.
Первый.
Насколько я понимаю в кнопке светодиод и просто кнопка (без фиксации). Кто-то может дать схему “кнопки безопастности” (SWITCH). В инете нашел распиновку порта. По схеме там три контакта
1 (red) VCC +3.3V
2 (blk) !IO_LED_SAFETY GND
3 (blk) SAFETY GND
По схеме принципиальной вот так


Чего-то не пойму что-куда подключается (кнопка-диод). По идее 1-2 диод, 1-3 кнопка? Тогда получится что кнопка “светится” в режиме дизарм?
Спасибо за ответ. Если тема поднималась - подкинте ссылку.
Тогда получится что кнопка “светится” в режиме дизарм?
Кнопка светится - моторы будут крутиться после арма 😃
Кнопка, на самом деле, не нужна никому
(кроме тех кому она нужна, конечно)
Кнопка имеет три вывода. первый справа - +3,3 вольта, потом две земли. Светодиод весит на средней земле. При нажатии кнопки +3,3 вольта и крайняя земля (слева первый провод - КЗ). Кнопку можно убрать програмно. Я убычно оставляю. Весьма полезная вещь. Обычно Пикс идет с этой кнопкой. Без нее - не встречал.
Косте и Роману спасибо. Пикс взял б/у и пустой (только контроллер). В принципе я так и думал - замыкание сигнального вывода на землю. Но по схеме (ту что нарыл) не увидел подвязки опорного на ноге проца, вот и побоялся тупо +3 садить на землю 😃
Еще вопрос. Есть регули BiHeli-32. там есть вывод телеметрии. На пикс это можно вывести (телеметрию ESC)? Не наю зачем мне это пока, но раз есть такое - чего не подключить.
Насколько я знаю, Пикс не поддерживает данный тип телеметрии. Во всяком случае при своей родной ардупилотовской прошивке.
В последних прошивках можно, нужен свободный UART порт. У меня оно как то нестабильно работает, через время отваливается. Но это не на пиксе а на матеке 765
Свободный порт serial 4/5 на пиксе есть. Он подойдет? Там 5в питание идет. И на OSD нет же оборотов двигателя у mini/micro OSD. В Матеке то есть, это да.
С телеметрией в общих чертах понятно. Бум пробовать. Пока запускаю-собираю на базе железа оставшегося от арм.
Вопрос по модулю GPS задам здесь ибо это больше пикса касается.
Модуль M8N с двумя разьемами (GPS и I2C ). Пока падключу к таким же на пиксе. Но хочется минимизировать разьемы.
Хочу загнать их в один разьем, наподобие GPS от пикса
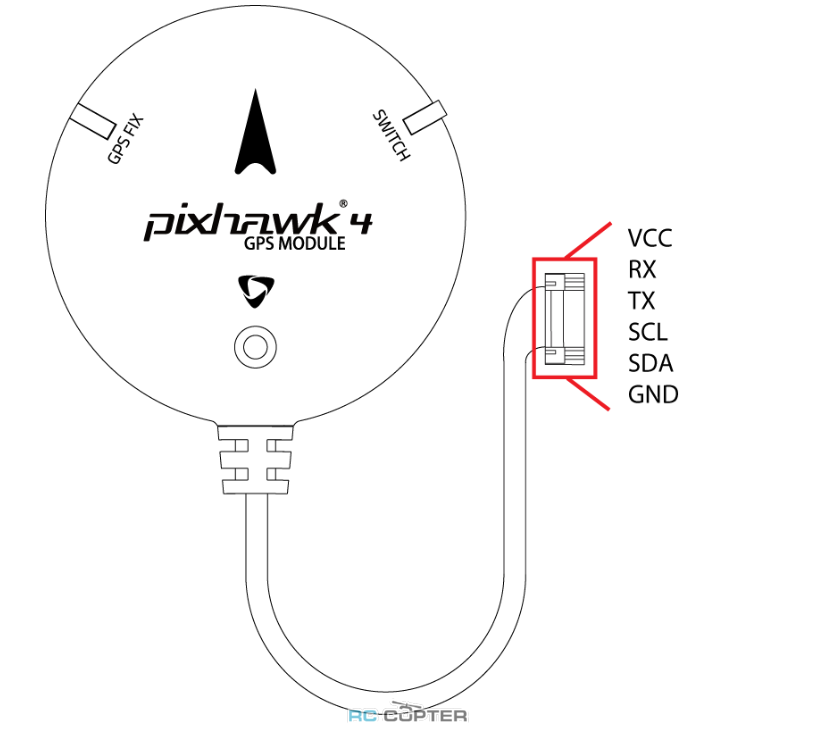
Ну а ноги компаса кинуть на 4 и 5 ноги GPS порта, освободв разьем I2C на “будущее”
GPS port,
Pin Signal Volt
1 (red) VCC +5V
2 (blk) TX (OUT) +3.3V
3 (blk) RX (IN) +3.3V
4 (blk) CAN2 TX +3.3V
5 (blk) CAN2 RX +3.3V
6 (blk) GND GND
Получится такое?
Я не вижу смысла в таких переделках. Шина i2c работает с адресами. Поставьте разветвитель и все. И что хотите подключить? Проблемы начинаются когда датчиков полно воткнуть собираетесь. Так кучу лидаров например. А так для всего там места хватит. Да и в настройках порта нет компаса вроде.
Роман, спасибо. Спросил ради интереса.
Пока подключил GPS по схеме
1 (red) VCC +5V
2 (blk) TX (OUT) +3.3V
3 (blk) RX (IN) +3.3V
6 (blk) GND GND
Просто перебросил провода с 5 пин. колодки на 6 пин.
По i2c (компас я понимаю) работает. По GPS не определяет подключение. Буду читать ветку - может что найду, если раньше не подскажут.
ПС. В пиксе компас совсем не так калибруется как в арм, буду разбираться, ибо орет что не калиброван…
Компас в пиксе калибруется в зависимости от прошивки и программы из которой это делается. Но принцип тот же, разница там незначительная. Ориентацию не указываете(как в APM flip 180 и подобное). Просто указываете что Пикс. А дальше крутите по всем осям. Укажите какой компас основной. Обычно это выносной. Колодка просто перекидывается на 6 дырочную. И все. Вместо одной свободной дырки будет 2. Порядок проводов НЕ МЕНЯЕТСЯ. Схема распиновки ardupilot.org/…/common-pixhawk-overview.html Что значит не определяется подключение? В какой порт воткнули GPS? В каком режиме этот порт? Может он настроен не на GPS?
По GPS не определяет подключение.
Mission Planner -> Config -> Full Parameter List -> param: ser X… (порт куда подключен модуль gps) проверить скорость SERIAL X_BAUD (115., в какой-то из крайних beta прош., если видит gps, сам выставляет 256) и протокол (5= gps)
Я, кстати обнаружил что есть протокол для телеметрии с ESC. Вопрос как это все работает.
Привет Всем! Собираю квадр на 650-ой раме. Приобрел Pixhawk 4 от Holybro,а регуляторы T-MOTOR F35A 3-6S BLHeli_32 Dshot1200. Сейчас задумался подойдут ли эти регули к pixhawk. Или что необходимо будет сделать чтобы подошли.Я новичок в данном деле,думаю не выкинул ли деньги на ветер.
Сейчас задумался подойдут ли эти регули к pixhawk
Подойдут.
Привет Всем! Собираю квадр на 650-ой раме. Приобрел Pixhawk 4 от Holybro,а регуляторы T-MOTOR F35A 3-6S BLHeli_32 Dshot1200…что необходимо будет сделать чтобы подошли…
Сделать нужно (раз купил и хочеш пользовать все возможности регуля) обновить прошивку на регуляторах и выставь предварительно все нужные тебе настройки ибо по “пикам” эти настроить тяжеловато. Как - в инете полно (быстрее посмотрите и поймете чем писать и обьяснять). Есть ролик на ютубе. Ищется по “прошивка BLHeli_32”. Что бы понять быстро - ✔ Новeйшие технологии: 32бит регуляторы и обзор BlHeli32. [Wraith32 от Airbot]
Последняя прошивка на BLHeli_32 позавчера была 32.7 Для прошивки и настройки нужна (если у Вас только пикс из контроллеров) arduino nano (самое оптимальное и пригодится на будущее)
Если у Вас регули трехпроводные (колодка управления) то средний провод это не БЕК (+5) а выход телеметрии. То что писалось несколькими постами выше. Ну и конечно (пусть меня поправят, если не прав) в настройках МП выставить максимальный протокол для работы с ESC. Как - пока не разбирался - квадр тоже в режиме “перестройка с АРМ” но там (в МП) есть закладка “калибровка ESC” и там есть протоколы.
[IMG]
 [/IMG]
[/IMG]
Опять же если не прав, то пусть поправят знающие люди.
Компас в пиксе калибруется … Но принцип тот же, разница там незначительная.
У меня пока вот такое в МП при попытке калибровки компаса
[IMG]
 [/IMG]
[/IMG]
[IMG]
 [/IMG]
[/IMG]
По колодке и прочему - буду разбираться. Но вроде бы правильно перекинул на новый 6 пин. колодку. (выше распиновку указывал). Ну а если просто перекинуть 5 пин колодку в 6пин разьем то получается что земля колодки приходится на сигнальный разьема.
В любом случае спасибо за подсказки. Щас досабираю регули и моторы. Будут стоять, пока, два регуля типа Simonk 30A (надо перешить что бы появился OneShot125 хотя бы) и два BlHeli-32. Закреплю на штатное место контроллер и буду играться уже с GPS. Пока буду идти по мере очереди.
Спасибо огромное!!! Успокоили! Понял что в этом деле не все так просто и нужно глубоко изучать прежде чем предпринимать какое-то действие.
Очень неверное решение использовать разные регули. У меня вид калибровочного экрана чуть другое, но причина, что у меня не крайняя версия прошивки. Но работает без проблем, так что не меняю пока. Причина сообщения об арминге видимо то, что компасы не откалиброваны. Это сообщение лучше отключить, зайти в настройки арминга и отключить проверку. Переключение с 5 пиновой колодки на 6 пиновую просто переставить провода не меняя их порядка, а крайний провод в крайнию дырку. И все. Я калибрую компас в программе QGroundControl под Андроид на местности. Дома не калибруется.
Всем доброго времени суток.
Требуется очередная консультация.
Собрал железо. Прошил последней прошивкой 4.0.5 Теперь нет питания на сервовыходах 1-8, аналоговых 1-6 и приемника. (раньше на прошивке 4.0.4 была. Откат назад не принес результата). Планировал запитать приемник от входа SBUS. На выходах питания всех вышеперечисленных портов висит 0.2v. Такое ощущение что питание портов в параметрах выключено. Вроде бы 5v есть на плате (GPS запустился, а он питается от своего порта). Подскажите параметр отвечающий за питание сервопортов. Сброс по рекомендуемым двум командам из терминала сделать не могу - не получается, или делаю что-то не правильно.
Спасибо за подсказку решения вопроса.
Как пикс запитан ?
насколько я помню - то , что обозначено как SBUS - это SBUS выход .
Приемник надо цеплять на RCIN , независимо от протокола .
RCIN - это единстенный порт из всей решетки , где будут настоящие 5 вольт , если Пикс запитан толко через “Power”