PIXHAWK PX4 Autopilot еще одна летающая железка

По GPS не определяет подключение.
Mission Planner -> Config -> Full Parameter List -> param: ser X… (порт куда подключен модуль gps) проверить скорость SERIAL X_BAUD (115., в какой-то из крайних beta прош., если видит gps, сам выставляет 256) и протокол (5= gps)
Я, кстати обнаружил что есть протокол для телеметрии с ESC. Вопрос как это все работает.
Привет Всем! Собираю квадр на 650-ой раме. Приобрел Pixhawk 4 от Holybro,а регуляторы T-MOTOR F35A 3-6S BLHeli_32 Dshot1200. Сейчас задумался подойдут ли эти регули к pixhawk. Или что необходимо будет сделать чтобы подошли.Я новичок в данном деле,думаю не выкинул ли деньги на ветер.
Сейчас задумался подойдут ли эти регули к pixhawk
Подойдут.
Привет Всем! Собираю квадр на 650-ой раме. Приобрел Pixhawk 4 от Holybro,а регуляторы T-MOTOR F35A 3-6S BLHeli_32 Dshot1200…что необходимо будет сделать чтобы подошли…
Сделать нужно (раз купил и хочеш пользовать все возможности регуля) обновить прошивку на регуляторах и выставь предварительно все нужные тебе настройки ибо по “пикам” эти настроить тяжеловато. Как - в инете полно (быстрее посмотрите и поймете чем писать и обьяснять). Есть ролик на ютубе. Ищется по “прошивка BLHeli_32”. Что бы понять быстро - ✔ Новeйшие технологии: 32бит регуляторы и обзор BlHeli32. [Wraith32 от Airbot]
Последняя прошивка на BLHeli_32 позавчера была 32.7 Для прошивки и настройки нужна (если у Вас только пикс из контроллеров) arduino nano (самое оптимальное и пригодится на будущее)
Если у Вас регули трехпроводные (колодка управления) то средний провод это не БЕК (+5) а выход телеметрии. То что писалось несколькими постами выше. Ну и конечно (пусть меня поправят, если не прав) в настройках МП выставить максимальный протокол для работы с ESC. Как - пока не разбирался - квадр тоже в режиме “перестройка с АРМ” но там (в МП) есть закладка “калибровка ESC” и там есть протоколы.
[IMG]
 [/IMG]
[/IMG]
Опять же если не прав, то пусть поправят знающие люди.
Компас в пиксе калибруется … Но принцип тот же, разница там незначительная.
У меня пока вот такое в МП при попытке калибровки компаса
[IMG]
 [/IMG]
[/IMG]
[IMG]
 [/IMG]
[/IMG]
По колодке и прочему - буду разбираться. Но вроде бы правильно перекинул на новый 6 пин. колодку. (выше распиновку указывал). Ну а если просто перекинуть 5 пин колодку в 6пин разьем то получается что земля колодки приходится на сигнальный разьема.
В любом случае спасибо за подсказки. Щас досабираю регули и моторы. Будут стоять, пока, два регуля типа Simonk 30A (надо перешить что бы появился OneShot125 хотя бы) и два BlHeli-32. Закреплю на штатное место контроллер и буду играться уже с GPS. Пока буду идти по мере очереди.
Спасибо огромное!!! Успокоили! Понял что в этом деле не все так просто и нужно глубоко изучать прежде чем предпринимать какое-то действие.
Очень неверное решение использовать разные регули. У меня вид калибровочного экрана чуть другое, но причина, что у меня не крайняя версия прошивки. Но работает без проблем, так что не меняю пока. Причина сообщения об арминге видимо то, что компасы не откалиброваны. Это сообщение лучше отключить, зайти в настройки арминга и отключить проверку. Переключение с 5 пиновой колодки на 6 пиновую просто переставить провода не меняя их порядка, а крайний провод в крайнию дырку. И все. Я калибрую компас в программе QGroundControl под Андроид на местности. Дома не калибруется.
Всем доброго времени суток.
Требуется очередная консультация.
Собрал железо. Прошил последней прошивкой 4.0.5 Теперь нет питания на сервовыходах 1-8, аналоговых 1-6 и приемника. (раньше на прошивке 4.0.4 была. Откат назад не принес результата). Планировал запитать приемник от входа SBUS. На выходах питания всех вышеперечисленных портов висит 0.2v. Такое ощущение что питание портов в параметрах выключено. Вроде бы 5v есть на плате (GPS запустился, а он питается от своего порта). Подскажите параметр отвечающий за питание сервопортов. Сброс по рекомендуемым двум командам из терминала сделать не могу - не получается, или делаю что-то не правильно.
Спасибо за подсказку решения вопроса.
Как пикс запитан ?
насколько я помню - то , что обозначено как SBUS - это SBUS выход .
Приемник надо цеплять на RCIN , независимо от протокола .
RCIN - это единстенный порт из всей решетки , где будут настоящие 5 вольт , если Пикс запитан толко через “Power”
Запитан от отдельного модуля на основе DC-DC LM2596 (классика для АРМ) через порт “POWER” (1-2 +5v; 5-6 GND). Естественно от модуля питания HolyBro PM02 отрезаны +5 и используется только датчик тока. +5 от PM02 используются для питания телеметрии и OSD. По гальванике - земля везде общая. + разделен (не звонится между раздельными каскадами питания (пикс - телеметрия)
ПС. “что обозначено как SBUS - это SBUS выход” - не знаю как а приемник подключался (перед окончательной сборкой) именно на этот вход и прекрасно работал по SBUS. Там (на пиксе) три варианта для приемников. Отдельно на лицевой - под спектрум, и отдельно RC. SB

1 Вход для подключения приемника радиоуправления со стандартом выходного сигнала PPM
2 Futaba S.Bus receiver input - подключение приемника приемника радиоуправления Futaba
3 Main outputs - PWM основные выходы (подключение регуляторов оборотов мультикоптера)
4 Auxiliary outputs - PWM дополнительные выходы (например управление сервоприводами подвеса камеры)
То есть нет питающего на всей средней линии (power). Вернее висит там 0.4-(0.7 при отключении разьема от SB ) Вопрос не почему не работает приемник а вопрос почему на + линии колодки нет выходного питания +5
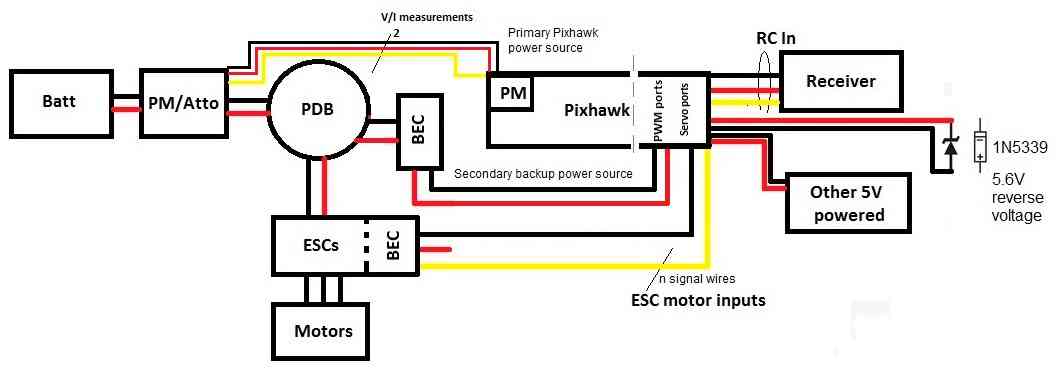
Или хотя бы схему (ссылка) что бы понять от чего запитывается линия серв по питанию.
Если на сервовыводы не подется отдельное питание , на них не будет 5в.
приемник надо подключать в RCIN
Про футубу это, по-моему, что-то из городских легенд …
ardupilot.org/…/common-pixhawk-overview.html
Про питание на серво-шине :
ardupilot.org/…/common-powering-the-pixhawk.html
Warning
Pixhawk does not supply power to the servo rail. Powering the servo rails is normally done by an ESC or alternatively a separate source such as a BEC (as shown in the wiring overview below).
Костя - спасибо. Уже сам вычислил по первоисточнику. (Pixhawk не подает питание на сервопривод. Питание серворельсов обычно осуществляется от ESC или, альтернативно, от отдельного источника, такого как BEC (как показано в обзоре проводки ниже).
Таки да - на сервовыводы не подается питание. Просто вчера ночью “собирал на столе”, мог конечно по запарке приемник подключить отдельным питанием и потом про это забыть. придется снимать верхнюю пластину рамы и кидать питание от БЕКа регуля. Адрес “букваря” забил себе в закладки - что бы по мелочам не кричать каждый раз караул.
Всем спасибо
придется снимать верхнюю пластину рамы
И потом еще не раз 😈
Ну не знаю про футабу а вот FlySky IA6 (прошитый под 14 каналов SBUS) вчера “на коленке” подключил именно в SB. И точно помню что калибровал 9 каналов.
Второй вопрос остается открытым.
Как сбросить еепром (через терминал). Пробовал при законектенном пиксе - ноль реакции. Пробовал при дисконекте - да дает писать в командной строке а выполнять не желает. Никакой реакции на энтер. Только переход на строку ниже. Вот и не пойму - как попасть в рабочий для ввода команд терминал (все действия делал без карты памяти).
Если просто сбросить все в дефолт , то самый простой , народный способ - залить самолетную или роверную прошивку , а затем вернуть коптерную.
Питание у Пикса всегда двойное. Не надо отрезать как для APM провода с плюсами. Оставляйте все как есть. Питание нужно подавать и на планку серв отдельно. Причем такое, чтобы выдержало и эти сервы и сам пикс. Т к если пропадет питание на планке Power, пикс будет запитываться через планку серв. Телеметрию желательно запитывать отдельно, особенно это касается , если она больше 100 мвт. Также лучше отдельно запитать и OSD. Распиновку Вам тут дали. См схемы на ардупилоте. Теперь о прошивке. Часто очень пикс отказывается прошиваться. И причина этому не какой нибудь EEPROM, а банальная нехватка питания на USB порту или (и) плохой кабель. Поэтому подключите его к к другому компу, желательно к USB 3,0 такой синенький порт, он там больше держит, ну или кабель сам замените. Никаких проблем быть не должно, если автопилот исправен. Через мои руки прошло штук 15 , таких проблем не было никогда. Там другое иногда бывает, но чтобы не прошивался, это никогда. Прошивку делать с картой памяти. Причем с нормальной. А не той, что там идет вместе с ним. Если пишет, что No I/O - это что карта говно. Карту отформатируйте вначале в компе. Установите стандартный размер кластера и нажмите Format. НУ и потом ее в контроллер естественно.
Прошивку делать с картой памяти.
Какая связь? Без карты прошивается.
ОН сбрасывает на карту иногда данные. Это видимо не суть важно, но у меня было пару раз, когда ошибку выдавал. Лично я тоже связи не вижу, но в прошивке может быть проверка на наличие карты. Во всяком случае хуже точно не будет.
Можно совсем отключить все функции использующие карту и летать без неё, как я и делаю. Ну и точно она не влияет на прошивку.
Помогите очередным советом. Pixhawk 4.6.7 plus, прошивка 4.0.5 copter. Вроде бы разобрался с калибровкой. Теперь есть вопрос по mini osd и выводе инфы на FPV. Не отображаются данные по акб и gps. По акб пишет - low а по gps no fix. Естественно и в графах акб и gps нули. При этом в МП (в окне телеметрии) все ок. акб и gps работают корректно и все отображают. Дело тут точно в настройках самой прошивки arducopter или в ее настройках. Заливал прошивку от QGK (граунд контроль) - в осд все показывает и отображает, но меня не устраивают возможности qgk. Повер модуль стандартный для арм - 3dr. выбрано в настройках батеру1 вольтаж и ток, другие (ручной ввод напряжения, хотя и на 3д тоже не отображает в осд), и тип пикс+куб
Всем спасибо за подсказки.
Думаю, как раз дело в прошивке осд. Не случайно есть разные прошивки для арду и пх4.
Через QGK можно залить любую прошивку, поэтому такое определение не вполне корректно.