GPS-приемники для квадрокоптеров

Uart. Tx Rx питание. У-центр с оф. Сайта качайте. Главное питание не перепутайте при подключении.
Вопрос - при конфигурировании ublox для apm порт надо spi выставлять? Или uart1? Почему то файл конфигурации именно так выставил, как на скриншоте. А я всегда uart1 выставлял. Может поэтому Лоитер у меня руские народные танцы, а не лоитер?
Не знаю как у гуру, а у меня - UART. Тогда и скорость порта появится ( уменя 38400). И ещё, частоту обновления (RATE) поставьте 1 ну 2 гц не больше, и посмотрите как висеть будет. В U-Centr данные желательно, что б без разрывов шли.
Посмотрите ещё в логах график долготы и широты по ЖПС, сильно прыгать не должно.
Но, это только по ЖПС, возможны наводки от ФПВ, неправильное согласование с компасом ну и влияние на компас магнитных полей от силовых проводов и батареи.

Подскажите пожалуйста как и чем проверить GPS модуль вот такой
Перестал ловить спутники. Антенна вроде целая, но смущает чёрная точка со стороны антенны где стрелка. С обратной стороны я так понимаю это компас.
Да кстати к компу коптер не подключить. Контроллер ZERO китайский. Коптер Chirson cx-20
Не знаю как у гуру, а у меня - UART. Тогда и скорость порта появится ( уменя 38400). И ещё, частоту обновления (RATE) поставьте 1 ну 2 гц не больше, и посмотрите как висеть будет. В U-Centr данные желательно, что б без разрывов шли.
Да вот прикол в том, что когда так выставляю - всё работает, когда ставлю uart1 - меня мотает как былинку. То туда, то сюда, то обратно, носится Лоитер в разные стороны. Не знаю, что за хрень. 3 разных модуля пробовал, один был вот так настроен. Я с утра его поломал, на uart1 выставил, пошел летать - и с ним начало колбасить туда сюда. Клмн то.
А скорость там вроде автоматом выставляется на 5Гц, так что по умолчанию можно что угодно ставить. Эх уж эти GPSсы, сил больше нет.
Вот лог, там есть попытка включить лоитер, всю дорогу сыплются ошибки GPS, причем их откуда то 2 штуки берется. и по GPS0 ошибка и по GPS2. Это как понимать?
Причем когда Лоитер включаю - ошибки пропадают. Судя по логу, хотя может я не понял что-то.
Так происходит, когда GPS настроен по феншую. А вот когда он там сам выставляет свои настройки (3.1 прошивка) - то все отлично работает. Заподня.
(В конце полета квадр падает, это из за ПИДов кривых, D задрал сильно, можно не обращать внимание)
yadi.sk/i/p7h8qSiCgqGMM
У меня тож антенна покоцана, однако это не мешает ей (пока ещё 😃 ) работать. Блок через FTDI адаптер подключить к U-centr и посмотреть.
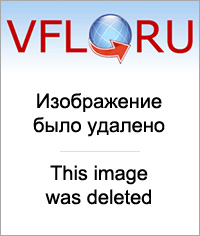
Подключил модуль. Мягко говоря, был сильно удивлен:

Здесь HDOP от времени. GPS лежал на окне, на улице был дождь.
3D-fix ловил долго, минут 10.
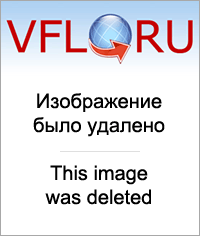
Сегодня утром потестил GPS на открытом пространстве (облачность околонулевая)

Стабильно держит 0.8 - 0.9.
Вот только одна проблема - когда GPS подключен к APM, hdop всегда в 2 раза больше, 1,6 - 1,8.
Собственно, вопросы:
1). Как посмотреть модель модуля в u-center’е?
Пока знаю только, что модуль u-blox 7 поколения (так его определил u-center)
2). Из-за чего при подключении к АПМ hdop в 2 раза выше? И можно ли с этим что-то сделать?
Блок через FTDI адаптер подключить к U-centr
Такой пойдёт? realrc.ru/product.php?id_product=1233
Из-за чего при подключении к АПМ hdop в 2 раза выше?
Видимо потому, что модуль у Вас работает на дефолтных настройках, то есть с битрейтом 9600 (судя по Ю-центру) и частотой 1 Гц, а АРМ хочет работать с модулем на скорости 38400, вот и возникает где то неувязка… Я не сильно в этом разбираюсь, вон Дмитрий в этих вопросах знаток, может что и подскажет…)
И можно ли с этим что-то сделать?
Сказать модулю, чтобы он работал на скорости 38400 с частотой не более 2х Гц, сделать это можно так: Ctrl+F9, в открывшемся окошке, на вкладке PRT поставить скорость 38400, а на вкладке RATE вбить частоту, так, чтобы в нижнем поле циферка показывала 2 Гц, не забыать нажимать кнопочку Сенд слева внизу. Потом переподключить модуль и проверить как работает…
Такой пойдёт?
Подойдет, только надо будет проводками соединить разъем модуля и разъем адаптера, и там и там разъем “мама”…) Или ищите адаптер с “папой”)))
Потом переподключить модуль и проверить как работает…
Хреново работает.
После переподключения битрейт показывает 57600 (сохранял 38400, пробовал 3 раза), частота сбрасывается на 1 Гц (ставил 2гц)
UPD: потестил на коптере, то же самое. HDOP держится 1.7-1.8
А вот через такую штуку не подключишь к компу(блюпуп на компе есь) этот модуль realrc.ru/product.php?id_product=1443
Спрашиваю потому что есть у меня такая.
А вот через такую штуку не подключишь к компу(блюпуп на компе есь) этот модуль realrc.ru/product.php?id_product=1443
Спрашиваю потому что есть у меня такая.
подключить можно,но скорость GPS модуля должна быть настроена до подключения по блютусу равной скорости вашего блютуса,
115200 bod,
и в U-centr тоже поставить 115200 bod.
подключить можно
Но работать не будет…) Во первых, потому что там нет 5 вольт и их придется откуда то заводить, а во вторых потому, что
скорость GPS модуля должна быть настроена до подключения по блютусу равной скорости вашего блютуса
а это можно сделать только подключив к Ю-центру…)
Замкнутый круг, однако…)
Это теоретически возможно 😃, а так, методом тыка подбирать скорость порта и думать - а может ЖПС не работает, а может скорость не совпадает , а может … Всё ж FTDI тут нужен.
Вот только одна проблема - когда GPS подключен к APM, hdop всегда в 2 раза больше, 1,6 - 1,8.
Сергей меня всё подначивает 😃 , тут, признаюсь, НЕ ЗНАЮ, по идее пофиг должно быть, я не разбирался где высчитывается Hdop. Если в самом блоке, тогда не важно какая скорость порта и частота обновления, логично , что данные будут зависеть только от кол-ва спутников и качества сигналов. Если Hdop вычисляется вне блока ( APM - комп ) тогда, возможны кучи вариантов , от разных алгоритмов расчёта , до быстродействия и фэншуя.
Модель блока смотрим здесь:

Сохранять конфиг текущий не просто сенд , а ещё и тут:
частоту обновления меняем периодом : 1000мс - 1Гц, 500мс - 2Гц, 250мс - 4Гц и т.д.

Но работать не будет…) Во первых, потому что там нет 5 вольт и их придется откуда то заводить, а во вторых потому, что
а это можно сделать только подключив к Ю-центру…)
Замкнутый круг, однако…)
настроить сначала в Ю-центре модуль ЖПС ,подключив через FTDI переходник,
или изменить скорость блютуса,чтоб была равна скорости ЖПС,
а потом подключать уже ЖПС через блютус,
для наблюдения спутников(но не настройки ЖПС).
на ПК или ноуте.
ПС:питание понятно тоже надо.
А вот когда он там сам выставляет свои настройки (3.1 прошивка)
Блок ЖПС сам ничего не выставляет, АПМ под него подстраивает скорость порта и ВСЁ. Все остальные настройки от ВАС в блок ЖПС. Всё же попробуйте уменьшить скорость обновления, посмотрите тут мои наблюдения связанные со скорость обновления и скоростью порта :rcopen.com/forum/f123/topic287781/2590
настроить сначала в Ю-центре модуль ЖПС ,подключив через FTDI переходник,
Так почитайте внимательно… Василий и хочет вместо FTDI использовать ВТ, ну нету у него FTDI…)
Блок ЖПС сам ничего не выставляет, АПМ под него подстраивает скорость порта и ВСЁ. Все остальные настройки от ВАС в блок ЖПС. Всё же попробуйте уменьшить скорость обновления, посмотрите тут мои наблюдения связанные со скорость обновления и скоростью порта :rcopen.com/forum/f123/topic287781/2590
Я читал. Но в описании изменений в прошивке 3.1-rc6 в пункте 5 есть строчка
d) detect Ublox GPS running at less than 5hz and resend configuration, что я примерно перевел как:
Если АРМ обнаружил, что GPS работает на частоте меньше чем 5 Гц то высылает в него свою конфигурацию.
Поэтому делаю вывод, что не имеет смысла ставить частоту отличную от 5Гц, все равно на прошивке выше 3.1-rc6 GPS будет переконфигурирован.
Посмотрел - Hdop это параметр протокола NMEA, так что его выдаёт сам блок ЖПС. В протоколе UBX используется Pdop ( точность в 3D, Hdop точность в 2D). На коптере, видимо, влияют помехи оборудования бортового. А вообще на dop влияют :
- орбиты спутников;
- наличие объектов-помех, закрывающие необходимые области неба;
- влияние атмосферы;
- отражение радиоволн.
Поэтому делаю вывод, что не имеет смысла ставить частоту отличную от 5Гц, все равно на прошивке выше 3.1-rc6 GPS будет переконфигурирован.
Если это так , тогда плохо, у меня с частотой 5 Гц проблемы с потоком данных ( он рвётся) и лойтера, соответственно, тоже нет.
Я летаю на прошивке 3.1.5 с конфигом 38400, 2Гц, работает норм и не меняется.
И ещё, если даже АПМ действительно переконфигурирует блок , зачем рекомендуют заливать конфиг ?
copter.ardupilot.com/wiki/…/common-ublox-gps/
Так почитайте внимательно… Василий и хочет вместо FTDI использовать ВТ, ну нету у него FTDI…)
Уже заказал. Ждёмс.
Я летаю на прошивке 3.1.5 с конфигом 38400, 2Гц, работает норм и не меняется.
Очень сложно уже понять, когда они это рекомендовали. Вполне возможно до выхода того обновления.
А чтобы убедиться, что он реально остается работать на 2Гц - думаю можно в параллель попробовать USB-TTL подсоединить и запустить квадр уже с коннектом на u-center. Тогда там сразу станет понятно, меняет ли конфиг АРМ и какую частоту выставляет.
Я со своим 3.1 не могу разобраться. Толи у меня с железом беда какая-то, то ли я туплю где-то, но когда выставляю рекомендованные настройки - лоитер начинает колбасить в разные стороны. То влево на 10 метров, то вправо на 30, зачем вперед на 50… И похоже только в случае, когда сам АРМ конфигурирует GPS - тогда всё хорошо работает и лоитер как прибитый висит. Самому страсть как интересно, что он там такого выставляет?