GPS-приемники для квадрокоптеров

Вы там работаете? Такой пиар магазину идет все время.
Ну кто покупает в рцтимере пиарит рцтимер:) мы покупаем тут поэтому и пишу. Модули эксплуатируем в очень тяжелых условиях и пока ниодного сбоя не было по причине модуля.
Вообщем не срыв покровов конечно… но какие то выводы сделать можно.
Тут была куча красивых картинок как хорош MTK от Дмитрия и Алексея как он четко держит точку в МП и не дрейфует и как дрейфует ублох. Но меня просто вымораживало что вместо того чтобы висеть на месте коптер дергается в лойтере на ГПСе МТК. В штиль еще хрен с ним но вот в ветер все ухудшается. Спасибо коллеге по несчастью nighthood который сказал что на ГПСе МТК такое же дергание. Вообщем в морозный субботний денек решил устроить тест драйв этим ЖПСам.
Вернул обратно на коптер внешний компас (до этого использовал компас на GPSe МТК, но он давал довольно большие оффсеты 130 90 10, примерно так). Для чистоты эксперимента давал обоим модулям настояться на улице сначала минут 5-10 чтобы коптер охладился, далее перезапуск питания, 2-3 минуты на фикс и взлет.
Вот такая получилась картина
Кому интересно логи тут
www.dropbox.com/s/t4djr6xxqmcqe2k/UBXvsMTK.rar?dl=…
Если вкратце то модуль МТК точнее, спору нету, но то ли мне он достался с кривой прошивкой, то ли арду любит Ублоксы и использует какую то встроенную фильтрацию в нем но на ублоксе коптер висит стабильнее - это факт. В ублокс была залита крайняя прошивка 7.03 и залит конфиг файл с сайта 3d robotics.
Прошивка APM 3.1.5, AHRS GPS GAIN 0
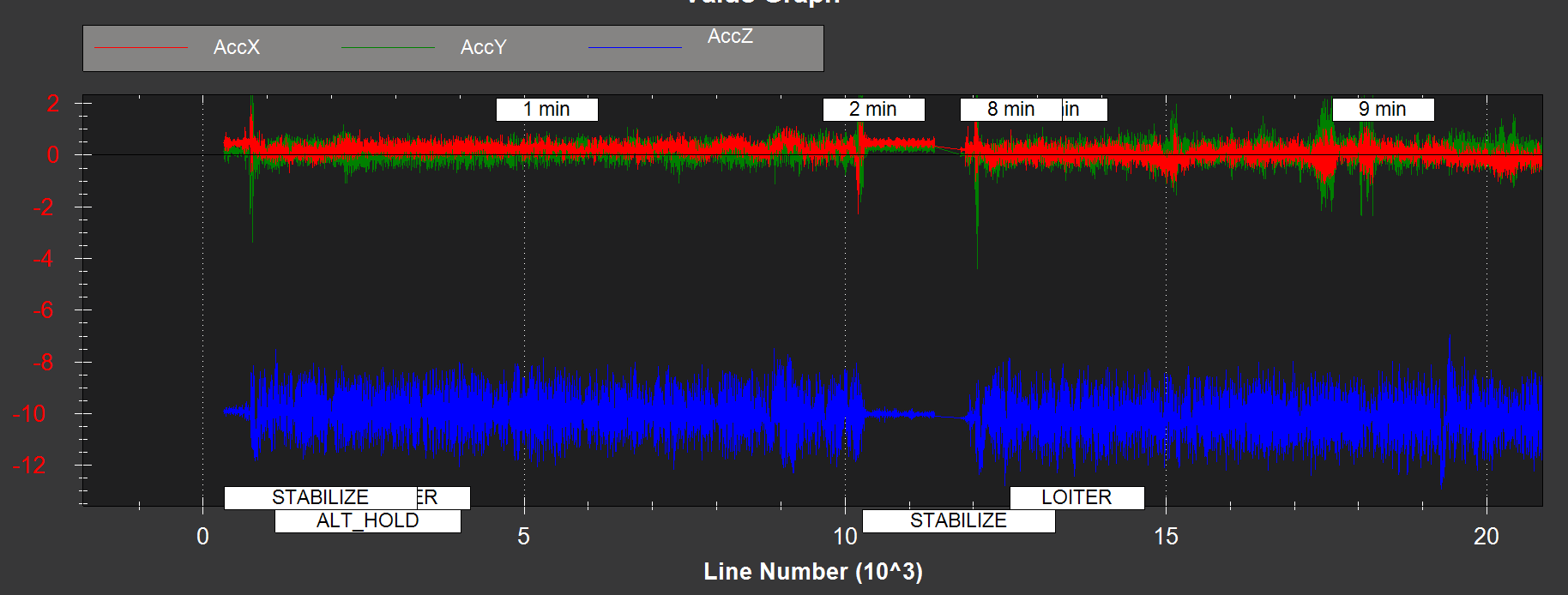
Вибрации по Z конечно несколько большеваты но в целом очень даже укладывается в рекомендуемый коридор
график на мтк
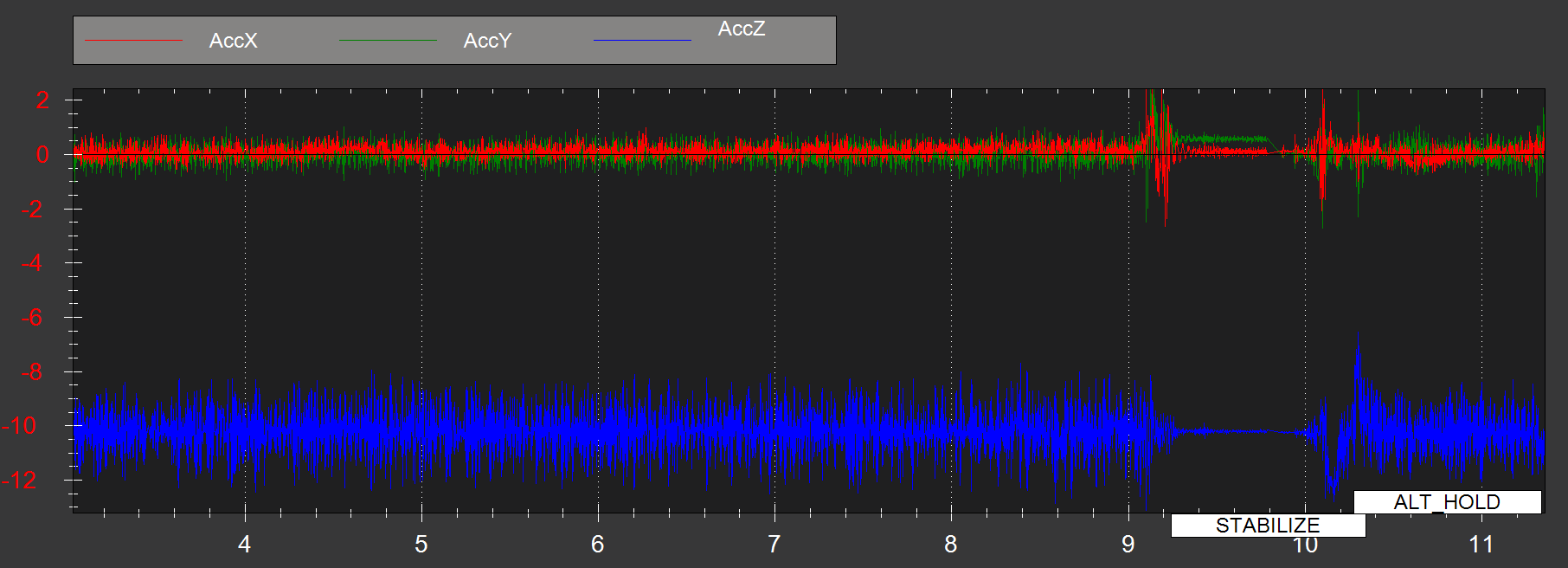
график на ублоксе
PS. Видео загружается, будет онлайн через пол часа
Коментировать тут нечего, а вот разобраться стоит спору нет, увы на арду не буду летать пока себе не соберу маленький тестовый коптер, а до этого еще далеко. Хотя странно что у тебя компас выдает такие большие офсеты, у меня при калибровке даже на коптере больше 10 не поднимались.
могу предложить еще одно проверить а попробуйте выключить парное и оставить только либо глонасс либо ГПС, возможно причина еще и в этом. Но по моему мнению гдето все таки в арду косяк не даром эти шибздики отказались от мтк и барыжат только ублоксами.
Оффсеты фиг с ним. Может чип плохой, может рядом что напаяно. Это фигня внешний повешать не проблема, веса минимум да и цена не кусается. Разобраться бы конечно хотелось потому что потенциал есть и хотелось бы его реализовать.
PS видео закачалось, можно комментировать 😃
Я к сожалению не спец в этих ваших ардукоптерах ибо сам летаю на назе, надо чоб Алексей прокомментировал данную ситуацию. Но кстати я когда последний раз летал понизил лойтер пид и дергаться стал меньше возможно тайна кроется где то рядом. Прошивка у всех одна и та же сделана она для арду. Но косяк вероятно где то в коде. Хотя если бы Алексей выложил видео нормально летающего аппарата на арду то можно былобы предположить что вы что то делаете не так.
Вот аппарат как можно заметить с таким же гпс но правда компас на ножке, как летает судить вам, но это лучшее что мне удалось добиться от арду на тот момент, а потом случилось страшное, я психанул и перешел на назу.
Есть 2 GPS на модуле GPS Ublox NEO-M8N
Ublox NEO-M8N High Precision
GPS Ublox NEO-M8N
Как я понимаю если я возьму дешевле то точность будет одинаковая ?
Ну кто покупает в рцтимере пиарит рцтимер мы покупаем тут поэтому и пишу. Модули эксплуатируем в очень тяжелых условиях и пока ниодного сбоя не было по причине модуля.
Ну остальные то покупают в китае. Так что я понимаю, что модули наверное неплохие, но мне кажется этот магазин больше никому не интересен. Потому что такой переплаты ЖПС не стоит. Ничего с модулями не случается, если они без косяков спаяны, которые, не так уж сложно визуально увидеть.
У меня условия не легче. Достаточно много крашей из-за стиля полета, и все модули в порядке. Да и что с ними будет, если они хотя бы в минимальной защите стоят? Хоть прыгай на них.
РЦТаймер тут уже многие антипиарят. И потом ссылки на дешевый китай, пиаром никак не назовешь. Так что вы так напрасно шутите.
Как я понимаю если я возьму дешевле то точность будет одинаковая ?
По логике да, а на практике - никто не знает. Вряд ли тут есть владельцы обоих модулей.
по поводу МТК и ублоксов скажу такое (столкнулись с omegapraim и soliada на вие, и как ты Дим это забыл а?)
так вот. ублокс на выходе выдает нефильтрованные данные, а у МТК по умолчанию фильтр включен (хз можно ли это отключить).
в итоге, ПО контроллера, изначально заточенное на ублокс - фильтрует его значений (в вие по умолчанию, в арду - хз).
в итоге при подключении МТК - получаем дополнительную задержку по координатам, что вызывает как раз похожие скачки (на самом деле - просто запаздывание координат).
П.С. может в мтк и нету вышеописанного фильтра, просто он значения точнее выдает (очень заметно при 2-х приемниках лежащих на одном и том же месте одновременно и продолжительное время), но именно из-за фильтра по умолчанию в мультивие оч долго как то мучался и не мог понять причину.
я психанул и перешел на назу.
Если не секрет, отчего психанули?
Серег, кстати да надо бы код арду глянуть, сомневаюсь что в мтк фильтрация отключается.
Психонул от того что эти кренделя слишком часто обновляли МП и я не смог настроить нормально арду…
ублокс на выходе выдает нефильтрованные данные, а у МТК по умолчанию фильтр включен
могу ошибаться но как мне кажется наоборот ублокс выдает уже какие то фильтрованные данные а мтк сырые.
В ублоксе есть опция которая отвечает за тип устройство на котором установлено ГПС (пешеход, авто, самолеты с разными скоростями). Как мне кажется очень похоже на фильтрацию. Конечно без анализа кода это все только домыслы…
Наконец я провел свои изыскания в области антенн для жпс. Был изготовлен вот такой зонтик.
К разьему sma прикручивается штырь четверть волны жпс 55 мм. Внутри коробочки находится голый модуль нео6м и компас. Запрограммировал плату коптера на прямую трансляцию пакетов нмеа через блютус на компьютер. Выставил коптер на лоджию и начал смотреть на компе как будет происходить холодный старт модуля (в нем нету батарейки). Через полторы-две минуты было найдено 4 спутника. Видя их уровни на экране, начал по миллиметру отрезать антенну и достиг лучшего сигнала при длине 47-48 мм. Так и оставил. Повторил холодный старт модуля - через 3-4 минуты у меня было 5-6 спутников и 3дфикс. Чего у меня на 3 (от разных производителей) модулях нео6м никогда в этом месте не наблюдалось. При холодном старте искало 2-3 спутника минут 30. Но никак не раньше. Получив такие результаты вчера выбрался на улицу полетать. Горизонт был затянут облаками. После подсоединения батареи к коптеру и до получения 3д фикса на 4 спутниках прошло 45-50 секунд. Где то через 2 минуты было уже 8 спутников. Холодный старт проверялся 3 раза (было только 3 батарейки). Результаты подтвердились. Проверял по видео. Находит спутники в течении 50 секунд. С керамикой холодный старт у меня получался порядка 3-4 минут. Что из этого следует(ЭТО СУГУБО МОЁ МНЕНИЕ)
что такая антенна более эффективна, стоит копейки и сломать и повредить её очень трудно. Для следующих испытаний подключу через сма разьем керамику и попробую её характеристики в одинаковых условиях со штыревой. О результатах отпишусь.
К разьему sma прикручивается штырь четверть волны жпс 55 мм
А где фото самой антенны?
А где фото самой антенны?
а вы не думали почему в гпс используют именно патч антенны? Что вы знаете о переотраженном гпс сигнале?
У меня на модуле холодный старт 10 сек пока втыкаю батарею уже 11 и более спутников
а вы не думали почему в гпс используют именно патч антенны? Что вы знаете о переотраженном гпс сигнале?
Патч антенна имеет направленность в виде половинки шара. И старается принять все спутники с небосвода. Штырь имеет направленность в виде бублика. Он лучше принимает дальние спутники, которые находятся на горизонте. Верх неба диполь не захватывает. Но мне центр небосвода в принципе и не нужен. В моем коптере определение высоты происходит по баро и акселю. Так что на точность позиции на плоскости земли верх не особо важен. А по скольку (может я конечно ошибаюсь,) но здравая логика подсказывает, что чувствительность диполя для спутников, находящихся на горизонте выше чем для патча. И в моем случае эффективность диполя для моей системы выше чем патча. Это сугубо моё имхо. О переотраженном сигнале и о его действии глубоких знаний не имею, может Вы поделитесь источником.
У меня на модуле холодный старт 10 сек пока втыкаю батарею уже 11 и более спутников
У Вас ведь наверняка в модуле стоит что то свежее, не нео6м? Я данные приводил относительно своего модуля нео6м. Кстати у меня в зонтике стоит компас очень близко к разъему сма(который металлический и магнитится) и проблем с компасом не наблюдалось. Хотя в теме было усиленное обсуждение этого момента.
ну и у GPS поляризация круговая, а у штыря линейная т.е вы сразу имеете -3Дб
ублокс на выходе выдает нефильтрованные данные, а у МТК по умолчанию фильтр включен
фильтр у юблокса вроде как регулируется есть несколько вариантов фильтра задается максимальное ускорение 1-4g
визуально зафиксировать ошибки работы фильтра можно так - берете апм с самолетной прошивкой подключаете батарейку, телеметрию и обходите какой нибудь периметр. юблокс какой бы ни был настроен фильтр в случае поворота на 90 градусов покажет “вынос” траектории спрогнозированный из последнего вектора скорости
у медиатека есть неприятная шняжка активированная в заводских не персонализированных прошивках выключаемая либо специальной прошивкой либо командой,
некий порог в 5кмч если скорость меньше этого порога то используется усиленное округление. разумеется коптеру оно не надо, поэтому я заказывал прошивку с выключенной этой опцией.
прошивка опубликована мною - можете воспользоваться files.msdatabase.ru/gps от 26 мая 2014
при постановке тестов некорректно сравнивать работу модулей с компасом встроенным в апм и внешним в случае если расстояние до силовых проводов менее 15см
эффект туалетной воронки проверять надо немного не так, как показано на видео, нужно делать небольшие пролеты с разными курсами носа коптера. воронка может не проявиться при отдельных курсах и быть повторяемой при других
правильное написание термина туалетная воронка такое: toilet bowl
помимо теста на отклонение от удерживаемой позиции порядка метрового радиуса бывает долгосрочный тест на предмет существенного ухода, в зависимости от ситуации за юблоксами наблюдается периодический крайне большой скачек в позиции, порядок скачка 20-2000м. я проверял юблоксы 6 и 7 серии и практически каждый раз в течении суточного теста в условяих открытого неба регистрировал случаи значительного отклонения.
такое отклонение обычно развивается в условиях нормального hdop и большого числа спутников. я полагаю что это и есть следствие программного умягчения определяемой позиции по вектору последней скорости.
собственно поэтому и есть дилемма чему довериться точной не фильтрованной позиции медиатека или позиции с математическим прогнозом юблокса.
пока такие наблюдения.
очень хорошо держит позицию на медиатеке если нет вибраций, то есть толщина линий акселя как нитка.
надо попробовать регулировку пидов лоитера для тех у кого аппарат ведет себя слишком агрессивно-дергано пробовать уменьшать.
ну и у GPS поляризация круговая, а у штыря линейная т.е вы сразу имеете -3Дб
кроме того круговая поляризация превосходно защищает от отраженного сигнала т.к. отраженный сигнал левой круговой поляризации становится сигналом правой
Да с надписью ошибся, каюсь.
в крайних версиях АПМ введена функция GPS Glith, то есть все скачки на 200-2000м должны игнорироваться. Плюс почитал список изменений на баро тоже они ввели этот функционал. Если барометр начинает скакать то так же его показания не учитываются.
Компас в обоих случаях внешний! Тот что был на модуле ГПС-глонасс я оставил без работы как и написал выше. Закреплен в одном и том же месте! Проверка была может быть и не исчерпывающая но достаточная. После того как снял ГПС-Глонасс и повешал ублокс то даже после небольшого пролета с изменением курса начался унитаз. После рекалибровки компаса - все ок.
Алексей спасибо за ответы и вообще всю проделанную работу, но когда я прибрел GPS-Glonass, то мне сказали что в него уже все прошито что нужно. Были рекомендации настраивать пиды лойтера. Пробовал крутить. В итоге дергание прекращалось, да, но возникал эффект как на низких пидах стабилизации. Коптер на управление реагировал очень медленно и мог дрейфовать слишком сильно. До новой прошивки руки не дошли так как Дмитрий меня заверил что модуль который мне продали стоял уже на коптере, прошивка залита верная и ничего с ним делать не нужно.
Без перепрошивки можно узнать активирована эта шняжка или нет на моем модуле?
я посмотрю что должно писать в версии прошивки и сообщу.
унитаза на вашем видео нет.
это другой эффект.
унитаз это когда вместо удержания позиции коптер начинает резко разгоняться, постоянное ускорение, траектория - спираль с увеличением радиуса
В итоге дергание прекращалось, да, но возникал эффект как на низких пидах стабилизаци
возможно излишне занизили
момент с унитазом я вырезал. Про пиды помню точно что было два состояния. Либо дергается либо дрейфует.
то есть все скачки на 200-2000м должны игнорироваться
у юблокса скачек происходит не одномоментно а как плавный разгон, глитч регистрируется не всегда
По поводу прошивки. Я ставил ту что от Алексея другой просто нет.
Похоже поборол я таки свой NEO-7N, дело было в следующем, на фото видно:
что один контакт (TX) не до конца был подключен. Проверил, контакты. Все заново переподсоединил. Через FTDI подключился к u-centre через 3-5 мин увидел спутники вот скрин:
Вопрос в следующем, что нужно настроить или поправить в настройках u-centre для дальнейшего подключения к АPM 2.6???
Или просто сразу можно подключить к АPM 2.6???