Вопросы новичка

привет всем !!!
нужен совет…
коптеров много… много … и мавики и фантомы и ассассины и рейсеры…
но захотелось сделать палколёт своими руками
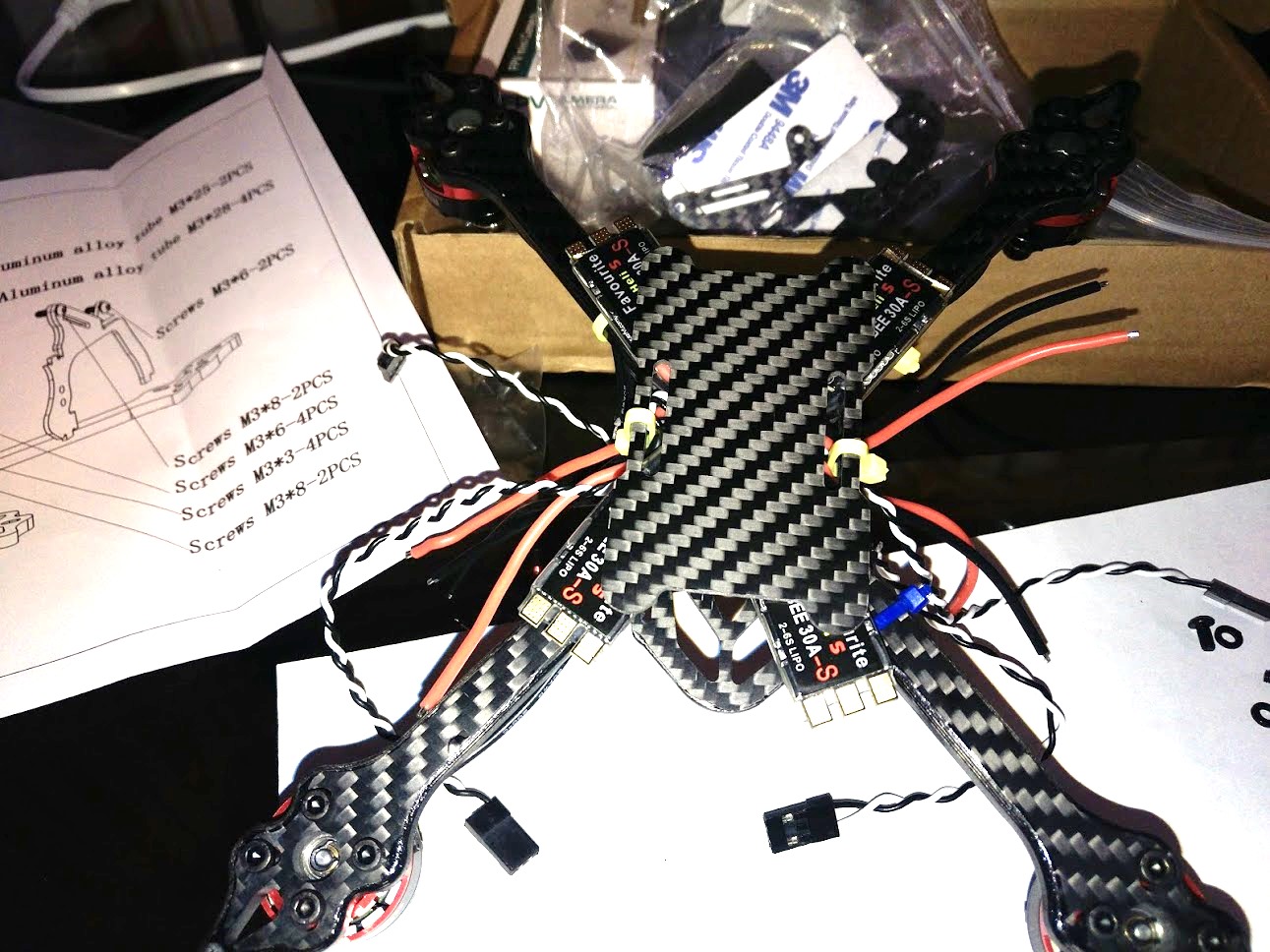
для реализации проэкта была взята рама
не нравится мне трамвай там или автобус как Вы его там называете … да и кто ищет лёгких путей 😃
рама по толщине 5мм но узкие и красивые такие лучи, я их хотел по тоньше сделать чтоб и красивый ещё был , к тому же я хотел передние лучи сделать синим цветом а задние красным , ну или все лучи сделаю тонкими и красными
от сюда возник вопрос ?
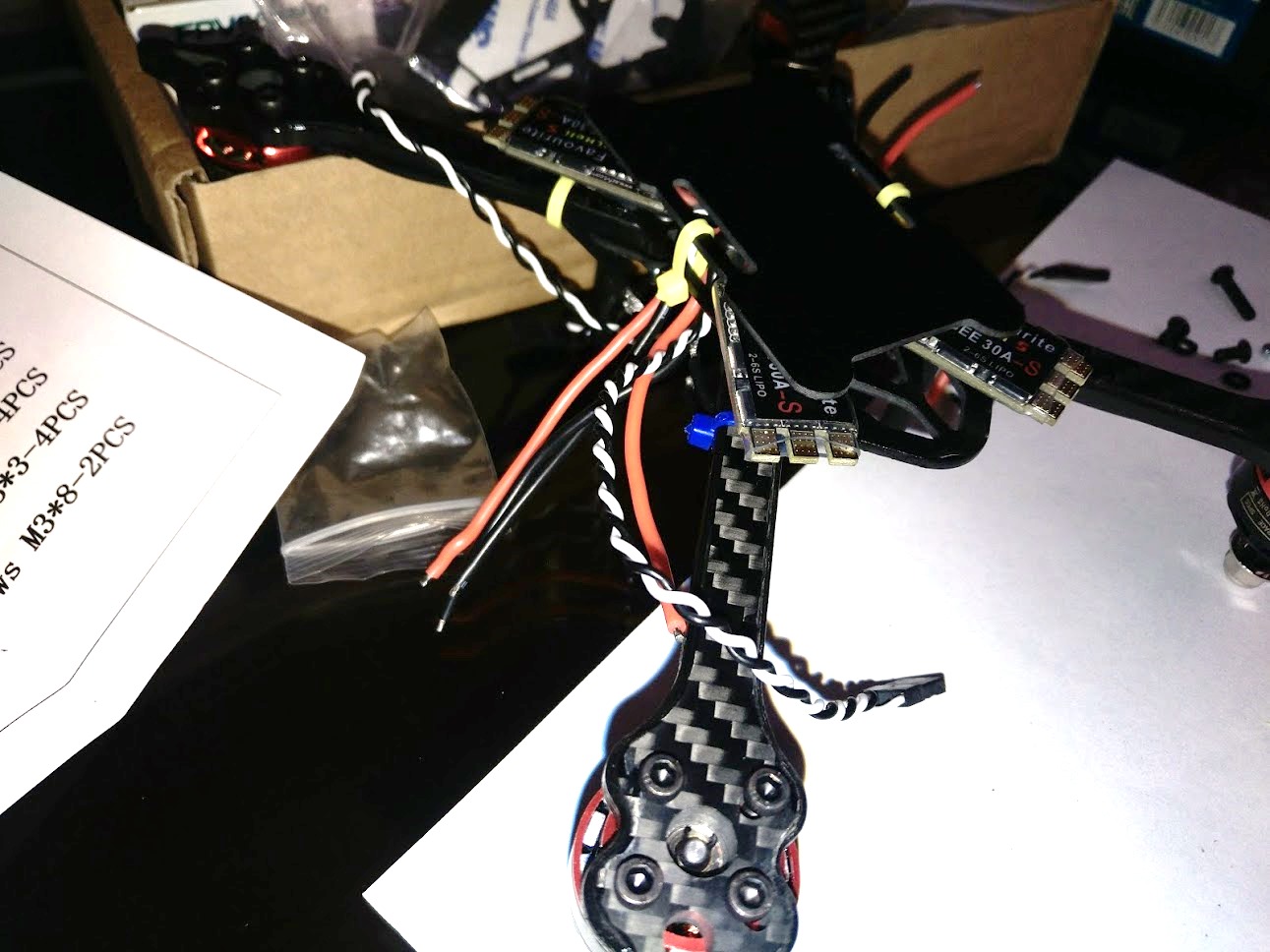
если я не купил (ну не подумал) регули 4 в одном а купил такие регули
я понял что я немного ошибся но что теперь делать… надо как то эти устанавливать
тем более что 4 в одном это я думаю для тех кто совсем с паяльником родился 😃
я жду мозг и он уже двухэтажный а тут ещё плюс приёмышь будет и видео куда то … то места в такой будке маловато …
я и подумал варианта 2
ставить всё же регули на лучи и пелевать на красоту 😦
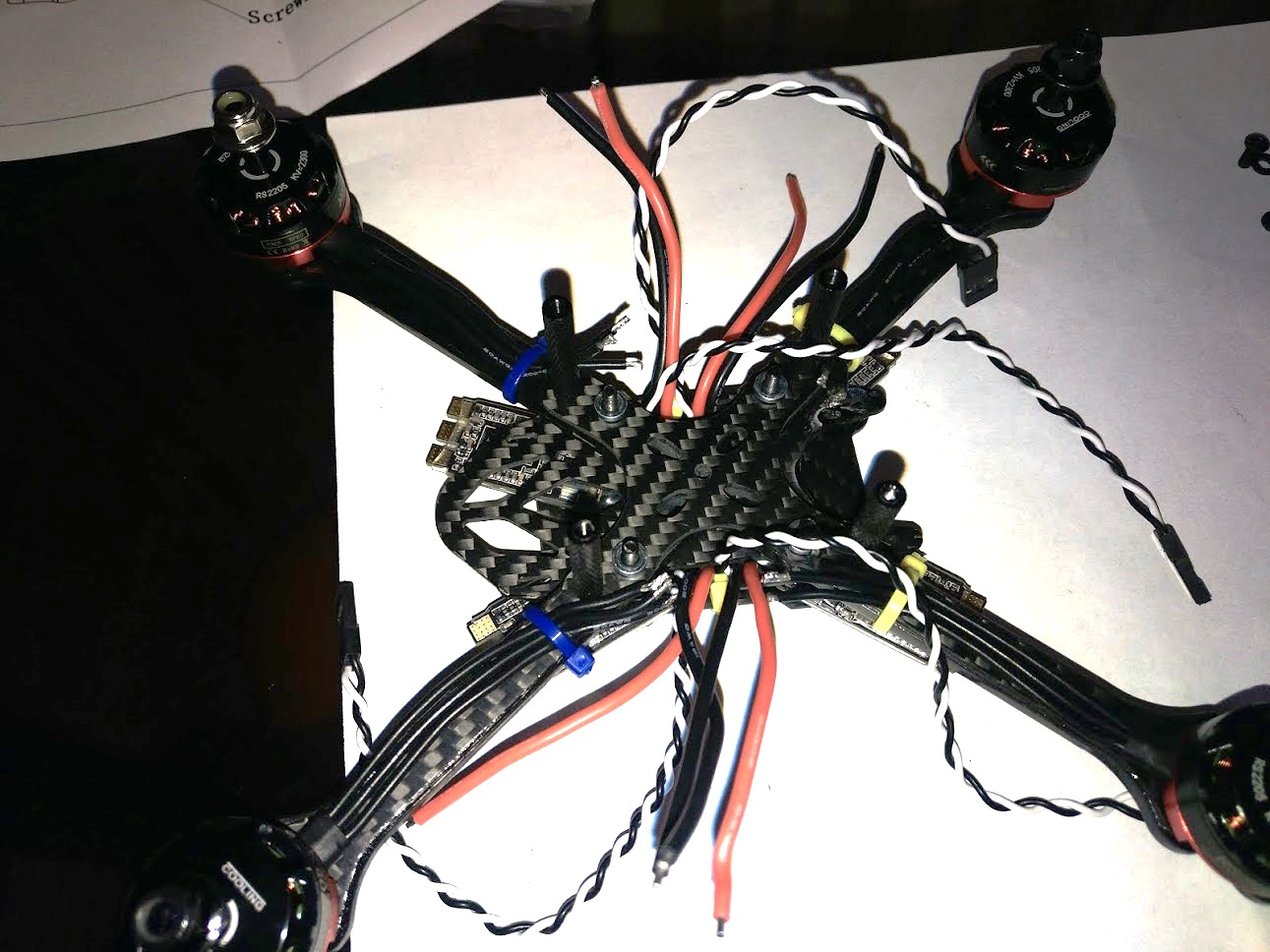
либо моздырить их снизу… 😃
вот я и попробовал как вариант так сделать …
оригинал
оригинал
оригинал изображения
это конечно не готовая реализация … это так набросок … потому как я понимаю что при каждой посадке я буду бить регули об болтики …
и даже если я что то подложу … можно просто пластмассовую пластину положить.
ну не знаю … может как то жесткую площадку снизу сделать самодельную?! или эту как то закрепить что б она к нижней раме крепилась намертво … или это вообще не вариант …
мозг таможню проходит … время как бы есть и хочу как надо сделать … 😃
у кого какие мыслишки есть?!
Переключается длительным нажатием кнопки.
да, точно, если долго зажать выбираются группы каналов, если еще дольше, дальность.
Стабильнее летает соосная или блином? - разница в весе 4х лучей станет в результате для меня выигрышем или проигрышем?
Классическая лучше. Соосная по эффективности конечно будет ниже.
Добрый день, подскажите, пожалуйста.
Решил собрать квадрокоптер. Опыт лишь в сборке двух танков. Немного почитал и поспрашивал, в итоге осталось несколько вопросов.
- Узнал, что есть открытые прошивки для мозга, чтобы можно было программно назначить команды для дополнительных функций. Есть ли открытые прошивки пульта? И мозг с пультом нужно брать комплектом? Или как-то подбирать друг к другу?
- Мозг контролирует оставшийся заряд? Чтобы знать, что пора садиться.
Как я понял, нужно действовать в следующем порядке:
- Определиться с целью: дальность или скорость. В моём случае скорее дальность.
- Выбрать раму, учитывая вес и цель.
- Под раму и цель подобрать моторы+винты. Выбор регуляторов зависит от выбора моторов?
- Выбрать мозг. В моём случае с открытой прошивкой. Приёмник в мозг входит?
- Выбрать пульт, учитывая мозг.
- Выбрать аккумуляторы. Как определиться с количеством? И разве нельзя накидать их побольше, для увеличения времени полётов? Или там уже из-за веса время пойдёт в обратную сторону?
- Выбрать связку для видео передачи. Тут, как я понял, выбор не столь зависит от чего-либо. Лишь от дальности предполагаемой.
Немного почитал и поспрашивал, в итоге осталось несколько вопросов
Вас сюда отправили читать, а не задавать вопросы, тем более, что они у Вас не совсем правильные… Вот что Вам следует понять для себя:
- Что такое радиоуправление.
1.1 Что такое пропорциональные и дискретные каналы РУ, как они работают.
1.2 Как осуществляется взаимодействие между пилотом и моделью, понять цепочку Органы управления - Передатчик - Приемник - Исполнительные устройства. - Выяснить почему Ваши танки(судя по вопросам неуправляемые) и авиамодели, это в принципе разные вещи.
- Много читать. Вам уже говорили, что одним постом на Ваши вопросы ответить нельзя. Авиамоделизм в целом, и коптеры в частности, лежит в плоскости пересечения многих наук и дисциплин. Чтобы полностью понять всё, надо обладать тремя-четырьмя образованиями, поэтому нужно читать. И учитывать опыт и мнение людей в тех областях, которые пока Вам недоступны.
- Скилл программиста - не самое важное умение в авиамоделизме…) Хотя и может пригодиться иногда.
Теперь к вопросам…
Мозг не обязательно с открытой прошивкой, учитывая цель…) Вы же не хотите, чтобы однажды аппарат не вернулся из дальних странствий? Поэтому, чем меньше Вы нарукоблудите в прошивке, тем лучше летать будет. Хотя, если цель не полеты а ковыряние в прошивках и настройках, то Вам виднее…)
Пульт - штука самостоятельная по определению, у бюджетных приемник чаще всего в комплекте. Выбор заключается только в необходимом количестве каналов и в перфекционизме/удобстве. На выходе у любого приемника можно взять команды понятные любому мозгу. Точнее даже так - наборы команд стандартные, поэтому прошивки для мозгов пишут так, чтобы оно работало…
Выбор аккумулятора целиком зависит от применяемых моторов и так далее… Грубо так: Вес - Пропеллеры - Моторы - Батарея. Дело в том, что ротор(пропеллер с мотором) может поднять строго определенный вес.
Видеочасть - исходить стоит из веса и потребляемой/излучаемой мощности. Выбирать по отзывам обладателей того или иного девайса в соответствующих темах форума(вот видите, опять читать…))
Ваши танки(судя по вопросам неуправляемые)
Они очень даже управляемые. Пусть может и не во всех тонкостях радиосвязи там разобрался, но всё настроил и заставил работать. Там по большей части ардуино + самодельные модули использовались. И, по сути, если бы не проблема с видеосвязью (и пара других мелких вопросов), то я бы так же попытался по подобной схеме сделать и квадрокоптер.
Вообще, читать я только за. Но сколько бы я не находил статей на подобии “квадрокоптер своими руками”, то там я пользы особой не видел. Там стандартная схема - нам нужно купить это, потом это и это. Собрать, прошить и запустить. Ладно сами изготавливаемые квадрокоптеры не подходили под нужды, но беда была в другом. Нигде не встречал ответов на более подробные вопросы. Почему выбирают именно такую делать, что от чего зависит. Везде лишь список что купить и как собрать, грубо говоря. Хотя с таким же успехом на том же Алиэкспрессе можно купить набор.
На форуме искал темы почитать. Где-то нашёл ответы на свои вопросы (как в этой теме), где-то лишь кучу ссылок на темы с обсуждением определённых деталей. Глаза разбегаются. А хотелось бы теорию, чтобы узнать что от чего зависит и как лучше выбирать. Именно поэтому и решил спросить у людей. Надеялся, что либо помогут, либо пошлют в верном направлении, чтобы сам смог прочесть.
Есть два пути джедая )))
Первый - читать тему за темой, тупо и упорно, и второй - купить какой то дешевый кит, и на его примере начинать вникать что читать конкретно. Купить сразу то что нужно и стать умным и счастливым не выйдет, это я уже на своей шкуре понял. Дальше вникаю, с этой темы не выползаю, с нескольких более узких, с ютубов, и по ходу ковыряюсь в своих железяках, часть сжег, но это как бы расходники, машина тоже без топлива не едет, и без шофера…
Они очень даже управляемые. Пусть может и не во всех тонкостях радиосвязи там разобрался, но всё настроил и заставил работать. Там по большей части ардуино + самодельные модули использовались. И, по сути, если бы не проблема с видеосвязью (и пара других мелких вопросов), то я бы так же попытался по подобной схеме сделать и квадрокоптер.
Это очень опрометчиво. Я сам делал машинки на управлении через nRF24L01, и вижу разницу. Небольшой разрыв или глюк связи, который в танках можно и не заметить, тут просто воткнет модель в землю.
Приёмник в мозг входит
Наверное вот такие вопросы лучше всего показывают, что вам надо больше читать. Или, как я уже говорил, взять самый стандартный набор (только просите совета тут, чтобы не самый говеный взять), собрать его самым стандартным способом, и вы узнаете, как работает квадрокоптер в самом стандартном случае. И потом уже изучать, спрашивать и узнавать по каждому из узлов, почему так, а не иначе, и как вообще бывает иначе.
Небольшой разрыв или глюк связи, который в танках можно и не заметить, тут просто воткнет модель в землю.
А ведь верно, об этом не думал. Хотя так как планировал начинать с мелочи, то это было бы не так страшно.
Наверное вот такие вопросы лучше всего показывают, что вам надо больше читать
Вот в том и суть, что в статьях о постройке коптеров ничего не рассказывалось такого, а тут мне не повезло ещё напороться. Слишком много тут тем и сообщений.
только просите совета тут
Конкретно в этой теме или вообще на форуме?
Если сможете посоветовать стандартный набор для небольшого коптера, буду рад и благодарен.
посоветовать стандартный набор для небольшого коптера
я давал ссыль на 450-е. Там наверняка простые “свежие” комплекты, “свежие” ссылки на “свежих” продавцов китов этого класса. Только учтите, что в подобных “наборах” может попа-сться некондиция - читайте отзывы. Плюс таких комплектов, только в экономии времени - если ничего не забыли - не придётся ждать месяц “недостающих” деталюшек. Освоите “отвёрточную” сборку и будите с ней экспериментировать - и знания и развлекуха. Зато и вопросы будут правильные (понятные) - соответственно и помощь и советы.
Из Москвы подобные киты за несколько дней могут доходить air-hobby.ru/…/2301-kvadrokopter-f450-kit-lite.htm… и продавец проконсультирует по русски. Цена вполне сносная. Напишите или позвоните им, когда будут эти наборы, моШ что ещё из наличия посоветуют.
Случилась такая лабуда. Собрал коптер, пришло время первого старта. Поднял и при посадке уронил на 2 левых винта, они естественно уперлись об землю, и где-то сек. 10 так пролежали. Максимально быстро вырубили питание, но из этих двух моторов пошёл запах горелого, не сильный. Вроде бы не сильный краш, но запах был. После этого случая все проверил, протестировал, все в норме. Моторы крутятся нормально, коптер взлетает и все работает. Из двух моторов что уперлись об землю еле заметный запах есть, но никаких проблем в работе.
Обгорела обмотка и моторы под замену? Или ничего страшного не случилось? Визуально по моторах никаких признаков обгорелости нет, работают так же как и два противоположные. Моторы Gartt Ml4108.
Хотя так как планировал начинать с мелочи, то это было бы не так страшно.
Это ошибочное мнение, даже коптер с диагональю 200 - 250 мм может натворить очень серьёзных делов, причём за долю секунды. Разбитые телевизоры, дырявые потолки и мятые машины это только частица.
Исходя из ваших желаний и умений наверное да, 450-й комплект. Хоть я и ярый противник таких коптеров, ибо скука смертная.
Обгорела обмотка и моторы под замену? Или ничего страшного не случилось?.
Все зависит от цены краша. На какую суммы вы попадёте в случае краша по вине этих моторов.
Если сумма для вас существенна, то под замену, если нет - летать.
Обгорела обмотка и моторы под замену?
Изоляция провода держит 160-170 градусов до размягчения(по крайней мере нашего ПЭВ-2), так что, у Вас скорее всего обмотки целы, а запах от расплавившегося фиксирующего лака. Им обмотки заливают, чтобы не шевелились.
Разумеется, температура плавления у него значительно ниже, от сюда и запах. В общем, смысл такой: Если у обмоток цвет не изменился, можно не беспокоиться. Если хотите, можете капнуть по капле цапона или шеллака если есть на каждую обмотку. Хотя это практически ничего не даст.
Ребята подскажите такую вещь , полетный контроллер F4 и пищалка из компа , включаю на пульте забинденную кнопку что бы пищала пищалка , а она только цик цик и очень очень тихо ,ставлю на комп всё норм пищит как следует , в чем прикол ? от лабораторого БП тоже не хочет пищать
Для полетного контроллера используется активный зуммер с встроенным генератором.
Пищит при подаче постоянного напряжения 5 в.
На материнской плате используется просто динамик, для которого нужна звуковая частота входящего напряжения.
наверное не хватает напряжения, эксперементировал с buzzer`ом от 3в он у меня издает тихий звук, от 5 пищит нормально.
Сегодня был первый полет моего самосбора на базе pixhack v3. Режим GPS шикарно, висит как вкопаный, повороты отрабатывает отлично. Одно замечание, при наклонах теряет высоту, но при остановке возвращается на прежнюю высоту что была до потери. Где копать, что настраивать?
Возможно, слишком большие разрешённые углы наклона для эт конфига - коп “пикирует”. ВМГ не хватает тяги, поэтому “проседает” по высоте. Это опасно особенно при удалении копа : кажется, что всё нормально, а коп уже подлетает к дереву или дому, например, и он … летит ниже уровня препятствия, чем визуально кажется. Ещё опаснее это при автовозврате (если настроена большая скорость), когда его совсем не видно - при большой скорости он вААще может в землю зарыться (или кому в лоП). К тому же встречным порывом ветра может и просто к земле бросить.
Маленькие “макс-углы” - меньше манёвренность, хуже может порывы ветра отрабатывать, ниже возможная скорость… Большие разрешённые максимальные углы - могут стать большими проблемами, да ещё если коп будет перегружен, да ещё и на просаженном аке при авторазврате на всречном ветре.😃
Думаю ВМГ тяги хватать должно с лихвой, газ висения 30%(вес 2200г моторы gartt ml4108 500кв, винты 1555). Углы не знаю какие, все настройки сток, но коптер не резвый вообще. При ветре 13км/ч висит как вкопаный в gps режиме.
все настройки сток
НЕ торро-питесь что-то менять.
Надо ТОЧНО понимать, что именно хотим достигнуть изменением какого-либо параметра. И как должна “выглядеть реакция копа”.
В частности макс-углы отлично “просматриваются” на пролётах слева-напрво например, - по отношению к горе-зонту. Просадка сразу будет видна на большой скорости.
Для начала сохраните свою “рабочую” конфигурацию отдельно.
ВСЕ изменения обязательно записывайте в промежуточных файлах (с описанием), делая изменения только одного параметра за один раз.
Настройка мозгов требует чОткого понимания последовательности, т.к. большинство параметров “взаимосвязаны”. В соответствующих ветках подробности. 😃
Какой комнатный квадрик на сегодняшний день имеет смысл присмотреть? Думаю по какому пути пойти.Либо уже готовое решение,с коллекторными моторчиками и фпв камерой,либо снова самосбор. Наткнулся случайно на ru.aliexpress.com/item/…/32801321335.html Прикинул… В видео на Ютубе показано,что он не комплектуется родным передатчиком.Парнишка рулил с Тараниса. У меня Турнига с ВЧ модулем FrSky. Пока сомнения. Если брать комплект для самосбора,то тут тоже много вопросов… Например что лучше и дешевле будет. Коллекторные движки дешевле например, но лучше всё же бесколлекторные.Но они дороже. Пока что на распутье.