Подвес камеры на бесколлекторных моторах на Alexmos/Basecam

всем привет! зашел спросить про двухосевой подвес на платке BGC, колбасит по ROLL. можно что нибудь сделать или виновата погода на марсе?
заказал 3х HAKRC32 на storm32.
Приобрел трехосевой подвес на контроллере SimpleBGC 32bit Regular с двумя I2C IMU. При подключении приемника столкнулся с отсутствием сигнала RC_ROLL (питание идет). C RC_PITCH-pwm RC_YAW-pwm все ок. Подскажите, куда копать.
Всем спасибо за помощь ), разобрался сам
Друзья, все та же проблема не дает покоя и на storm32 nt. Подвес работает пару часов а потом срывается в ошибки. Перезагрузка не помогает, только дать “остыть”. Ладно i2c на клонах алексмоса, но и НТ-шный шторм срывается в bus error. Уже косо поглядываю в сторону 12-вольтового бека, от которого питаю подвес. Такое возможно?
Подскажите пожалуйста, замучал подвес 8 бит двухосевой с али, уже второй за 2 года, после 5-7 минут полёта начинается расколбас
и никак не управляется по питчу с пульта, прилетаю домой перезагружаю, через 5 минут то же самое… калибровал, ставил другую плату акселя, толку ноль. Может вибрации коптера виноваты, началось вроде после небольшого падения метров с 3-4.
Начал посматривать на другие контроллеры, может подскажете, такой никто не пробовал goo-gl.ru/57ft или такой goo-gl.ru/57fw и можно ли их ставить на двухосевой подвес и куда ставить тогда второй аксель?
контроллеры оба совершенно одинаковые , только один в коробочке а второй голый …
гироаксели тоже отличаются только наличием коробочек и расположением разЪёмов , видимо платы делали разные китайские партнеры …
на двухосевой ставить можно , второй сенсор ставится на коптере , позволяет определять взаимо расположение осей (степень их вырождения ) …
Такие глюки на этом подвесе у меня были когда сигнальный кабель на датчик был поврежден, с начала то-же тупил и не понимал в чем косяк, а потом прозвонил все и обнаружил периодически пропадающий контакт одного провода. Еще похожая проблема может быть из-за исчезающего контакта на одной фазе мотора.
Понял, спасибо всем большое, закажу с али без корпуса, пока приедет попытаюсь проверить старый на наличие и отсутствие контактов. Что странно, вспоминается мне, что и первый такой же подвес в прошлом году я забраковал из-за подобного поведения… но тогда не разбирался в проблеме, а просто купил такой же новый контроллер. Но сейчас полностью другой подвес с другими соответственно моторами.
Не может ли подвес так сходить с ума, если у коптера есть вибрации, попробую другие пропы, хотя старые балансировал на магнитном балансире, да и моторы санники 2216-800 вроде не плохие.
Не может ли подвес так сходить с ума, если у коптера есть вибрации
Вибрации на раме как раз могут нарушать контакт где-то, лично у меня так эта проблема и появилась летаю минут 10 все норм, внезапно у подвеса идет срыв дальше как у вас в видео, сначала я то-же не понял что к чему и проблемы какое-то время не было а потом опять, и уже после этого начал проверять все.
А сами же вибрации думаю не могут в большинстве случаев, если конечно не входят в резонанс с подвесом.
Ребята подскажите пожалуйста, уже все перелазил переискал не могу найти(
Заказал вот эту камеру ru.aliexpress.com/item/32739132515.html
в ней идет дополнительно провод который я потерял, как он называется кто знает, это для того что бы от камеры к аккумулятору подключать.
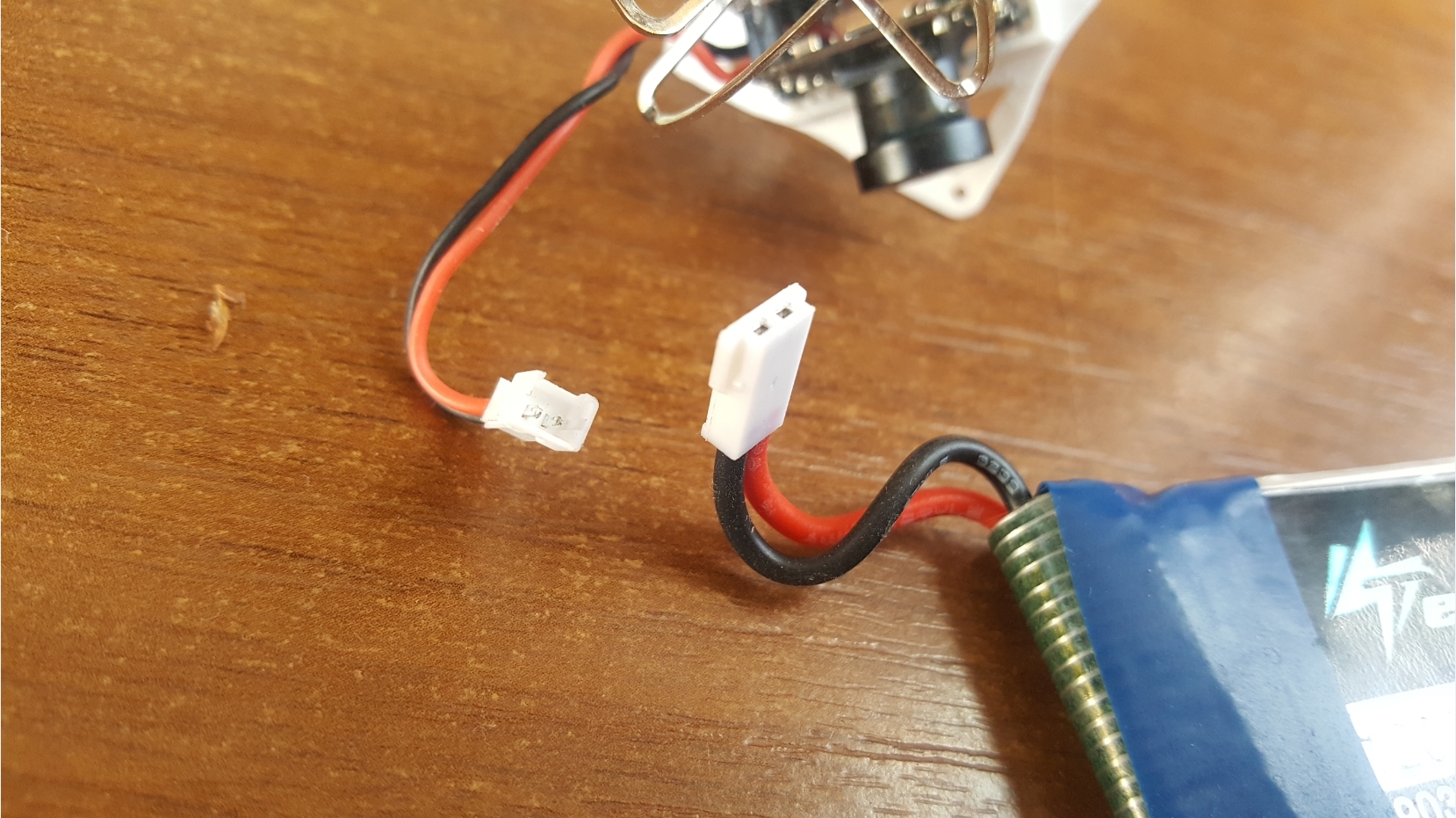
У катайцев спрашивал как называется они говорят не знают.
Здравствуйте вам! Немного не по адресу, но нужна ваша помощь Квадрик - Hubsan Zino. Наблюдается жёсткое подрагивание камеры (вот пример и вот) после влёта квадрика в провода (видео )
Снял джимбал, посмотрел - вроде всё на месте в подвесе, ничё не отошло. И, не понял, то ли после сборки, то ли после попытки замкнуть два контакта сзади джимбала (сделать резет), но ещё вдобавок перестал держать горизонт.
Причём подрагивает вверх вниз, в вертикальной плоскости. Горизонт держит норм, а если камеру вниз совсем опустить - тогда картинка стабильная получается.
Что делать? Кто-нибудь встречался с такими подрагиваниями? Что это может быть?
Калибровку подвеса делал.
Ребята подскажите пожалуйста, уже все перелазил переискал не могу найти(
Заказал вот эту камеру ru.aliexpress.com/item/32739132515.html
в ней идет дополнительно провод который я потерял, как он называется кто знает, это для того что бы от камеры к аккумулятору подключать.
У катайцев спрашивал как называется они говорят не знают.
Скорее всего это разъем JST XHD 2.54mm 2-pin Female.
Настраиваю режим Follow по оси Yaw на 32х битном контроллере SimpleBGS, с одним простейшим резистивным энкодером как раз на оси Yaw. Понял, что для того чтобы не лезли ноги коптера в кадр, надо увеличивать парамер Speed во вкладке Follow. Все стало нормально, но появился эффект “возврата” камеры в противоположную сторону, после поворота платформы. На видео заметно. Подскажите, каким параметром это можно устранить?
Кажется понял, в чем было дело. Заметил, что подвес после пары жестких посадок стал “не совсем ровным” (Devo G-3D). Рычаг между моторами Ролл и Питч дал кривизну. Т.о. при простом повроте платформы по панаромированию, отрабатывать приходилось двум осям, вместо одной. Отсюда и странный эффект возврата камеры.
У меня мини версия контроллера (из Ростова) без лицензии на все энкодеры. Т.е. могу пользоваться только одним (он как раз был в подвесе Devo, один, аналоговоый). Стабилизация отрабатывает хорошо, но как не кручу, пока не получается настроить домашнюю позицию камеры по YAW. Камера запускается в положении, какое ей угодно. Если переместь её рукой по YAW, продолжает оставаться и стабилизироваться в том положении, которое задашь ей рукой. (т.е. в воздухе может сбиться направление съемки). Делаю, как написано вот здесь, в разделе 4. Но по инструкции, перед настройкой начального положения идёт калибровка энкодеров, а в моей версии без лицензии энкодеров (v2.63b0), функционал калибровки отсутствует.
Делаю так:
- Отключаю “Follow” mode
- нажимаю CALIB. OFFSET в разделе Encoders (в графе напротив появляется некое чичло), и вроде все работает нормально, пока не включить обратно “Follow” mode. Когда её включаю, подвес уходит в правое крайнее положение (при реверсе энкодера тоже в правое), и начинает дёргаться.
Не дергается при включенном "Follow только, если в графе Offset ставлю 0.
Подскажите, как настроить? Прикрепляю файл моих настроек.
Подскажите, как настроить? Прикрепляю файл моих настроек.
В общем, сам задаю вопросы, сам на них отвечаю:) Возможно, они и были детскими, не знаю. Расскажу о своих ошибках!
-во первых, надо читать инструкцию строго соответствующую версии прошивки и GUI.
- во вторых, делать всё так, как там написано.
Теперь новая проблема - дребезг аналогового энкодера. Кто как справляется?
Теперь новая проблема - дребезг аналогового энкодера. Кто как справляется?
Выяснил, это называется шум контактов потенциометра. Выглядит он вот так:
Посмотрел, некоторые советуют шунтирующий конденсатор, между центральным контактом и землёй. Пробовал припаивать элкторлит, но изменений не увидел. Это при том, что какая-то минимальная схема у этого потенциометра уже есть.

Может, у кого есть эффективная схема устранения этого шума? Или скрипт какой залить в контроллер…
Вообще, странно, потенциометр вроде новый, валкера с ним не дергалась. Хочу еще попробовать снять поненциометр с этой платы и подключить напрямую.
нужно осциллографом ткнуться и посмотреть что там шуми …
вообще у Алекса есть ограничение на использование аналоговых энкодеров , оно точно оговорено в энкодерной версии , думаю что это будет справедливо и для обычной - не допускается переход сигнала энкодера через ноль , тоесть ось должна быть не 360 градусов а меньше … возможно у вас позиция перехода попала на рабочий участок …
ЗЫ: у вас вал который входит в потенциометр случайно не резиновый ???
нужно осциллографом ткнуться и посмотреть что там шуми …
Вот если б я дружил с этой штукой, обязательно бы ткнул… По поводу ограничения угла - этому энкодеру это не грозит, ведь он в той же конструкции работал. Я разбирал такой же (не этот) потенциометр, там довольно длинная дорожка (180 градусов точно). А подвес работает у меня максимум по 30 градусов в каждую сторону.
Вал - вроде снаружи - пластик, внутри - металл. Мог, конечно бракованный энкодер попасться…
Тут проблема не в том что сам энкодер не крутится на 360 градусов , а в том что в определенном положении напряжение на выходе перескакивает с максимума на минимум (ну и обратно) … это неудобный момент для контроллера … возможно это положение у вас как раз в рабочей зоне …
В прошлом году Олли (автор T-Storm32) пытался сделать свою электронику под 3х осевой тарортовский подвес для мелких камер … и у него ничего не получилось именно из за резиновых валов (кому интересно могут почитать профильную тему на рцгрупс с 55 страницы) …
А осцилопоказометр в хозяйстве штука полезная … себе купил и периодически пользуюсь когда не хочется тащить нормальный прибор … и ничего в нем сложного нет …
www.youtube.com/results?search_query=dso150
Та
Тут проблема не в том что сам энкодер не крутится на 360 градусов , а в том что в определенном положении напряжение на выходе перескакивает с максимума на минимум (ну и обратно) … это неудобный момент для контроллера … возможно это положение у вас как раз в рабочей зоне …
Думаю, главная проблема не в этом… Рабочая зона энкодера градусов 200 -220. Подвеса - 120 градусов, это максимум (не мерил, но точно меньше 180-ти).
Не в резиновости вала тоже, он не резиновый.
Возможно, всё дело в низкосортности самого энкодера. Сегодня попробовал ещё один, вот такой (смысл и сам элемент тот же, только плата не заточена под конкретный подвес, как предыдущая). Результат - дергается поменьше (я думаю, ввиду того, что он новый) но тоже дёргается.

Вывод: нужна эффективная схема усреднения выдаваемых значений, аппаратная или программная. Или другой энкодер, того же формфактора. Кстати, не знаете такого?
П/с. Есть кольцевые магниты, диаметральной намагниченности и датчики холла. (брал для переделки RC-пульта, но потом купил таранис и престал париться). Думаю, может запилить самодельный энкодер, подключить как аналоговый…
Думаю, может запилить самодельный энкодер, подключить как аналоговый…
Сделал! Видео и фото - вместо тысячи слов:)
Реакция на стрелки на повороты камеры четкая, без дрожи.
Нарисовалась новая задачка: белая стрелка стала слишком быстрой, а дробные числа в поле gearing ratio программа не даёт ввести. Сейчас стоит “1”. При отличных от единицы значениях (отрицательных или положительных), скорость вращения стрелки возрастает (прямо пропорционально модулю значения). Хотя, в инструкции написано: “Если белая стрелка опережает стрелку компаса, уменьшайте gearing ratio, и наоборот” . Правда это в разделе по настройке аналоговых датчиков, которые я мучил выше по тексту, похоже, там другая взаимосвяжь.
Похоже в конфигурации с магнитом, чем блие значение к “0”, тем медленнее будет стрелка врощаться, но приблизиться к “0” ближе, чем на единицу программа не даёт.
Как быть?

Алексей, когда появится подержка can телеметрии от полетных контроллеров DJI ?
storm 32 давно уже реализовал поддержку их протокола, сразу решается проблема с коррекцией горизонта без внешних гпс и возможность управления подвесами с помощью лайбридж2