Подвес камеры на бесколлекторных моторах на Alexmos/Basecam

О РОЛИ МУЛЬТИКОПТЕРОСТРОЕНИЯ в ЖИВОТНОВОДСТВЕ
На самом деле это пример того как ещё можно коптеры использовать. Можно пасти стада, направляя животных в нужном направлении, осуществлять поиск отбившихся от стада особей. Разве не круто? 😃
вот если бы коптер еще и летал с утра до вечера, как пастух пасет стадо…
Приветствую!
Вот этот подвес уже обсуждался? www.rctimer.com/product_912.html
Он идёт с контроллером? И всё за 150 баксов? Кто либо владеет, может высказать мнение о продукте? Мне показалась очень странной масса- 300гр только железяки подвеса без двигателей. Это всё в куче полкило минимум будет. Так ли?
Он идёт с контроллером?
без
Это всё в куче полкило минимум будет. Так ли?
да примерно
Этот DYS Brushless Two-axis Gimbal Kit w/4108 Motor& Motor Controller for Sony NEX ILDC Camera Aerial Photography ![]() + Некс 5эн = примерно 800 гр.
+ Некс 5эн = примерно 800 гр.
Режим следования удалось кому то настроить на подвесе с двумя осями? У меня в любых вариантах просто нервно вертит в разные стороны… Мелкий rc timer’овский подвес с гоупрошкой…
кого то интересовал движек с гудлакбая, для гоупро для 3 оси самое то, длина провода 180 мм, люфта практически нет.
кого то интересовал движек с гудлакбая, для гоупро для 3 оси самое то, длина провода 180 мм, люфта практически нет.
Вот именно про ЭТОТ двиг. хотел спросить:
Не подключенный ни куда двиг. проворачивается “тык-тык” преодолевая магнитное сопротивление.
Довольно существенное сопротивление но без мех. заеданий!
Это так и должно быть?
Если да то как тогда выставить (отбалансировать) подвес с камерой ГоПро?
Камера то легкая и как по мне то не пересилит “тык” двига!
Камера то легкая и как по мне то не пересилит “тык” двига!
С нексом та же фигня.
Фигня та же, а как все таки балансировать кто подскажет?
И во ещё вопрос эти “тыки” не будут мешать плавно двигаться подвеску в штатном режиме стабилизации?
Фигня та же, а как все таки балансировать кто подскажет?
Устранить мешающие факторы, магниты или статор.
Устранить мешающие факторы, магниты или статор.
Удобный способ.
Удобный способ.
Да, я пользовался статором без магнитопровода, можно пустой осью, если крепление только за ось или осью с фрагментом ротора, стопорные шайбы на горизонтальных валах можно исключить (как класс), т.к. их функцию выполняет магнитное поле, что упрощает сборку-разборку подвеса.
П.С. Интересно узнать альтернативные способы балансировки или ими пренебрегают получая лишний расход энергии и трудности при настройке контроллера.
такой двиг только под 3 ось пользовать, на пич и рол по серьезнее(качественнее) движки нужны(тут вал с дырой под проводки как раз удачен и вес маленький, усилия для прохи не сильно большие), что бы залипания не было большого, хотя у меня на рц таймеровском подвесе на стоковых движках залипаний таких нет, но и балансировать его геморрой еще тот((( но ничего стабилизируется на 4+ хотя сбалансирован не идеально, функцию свою выполняет в экстремальных условиях за исключением огрехов с горизонтом.
Приветствую!
Вот этот подвес уже обсуждался? www.rctimer.com/product_912.html
Он идёт с контроллером? И всё за 150 баксов? Кто либо владеет, может высказать мнение о продукте? Мне показалась очень странной масса- 300гр только железяки подвеса без двигателей. Это всё в куче полкило минимум будет. Так ли?
Только что собрал такой, впечатления положительные, механика правильная,демпфирование тоже, сборка заняла 10 минут, балансировка 5 минут. Буду ставить алексмос. Вес с NEX 7 =950гр. Вопчем грамотный подвесик, поставлю на Tarot 810
Подскажите пожалуйста распиновку платы третей оси 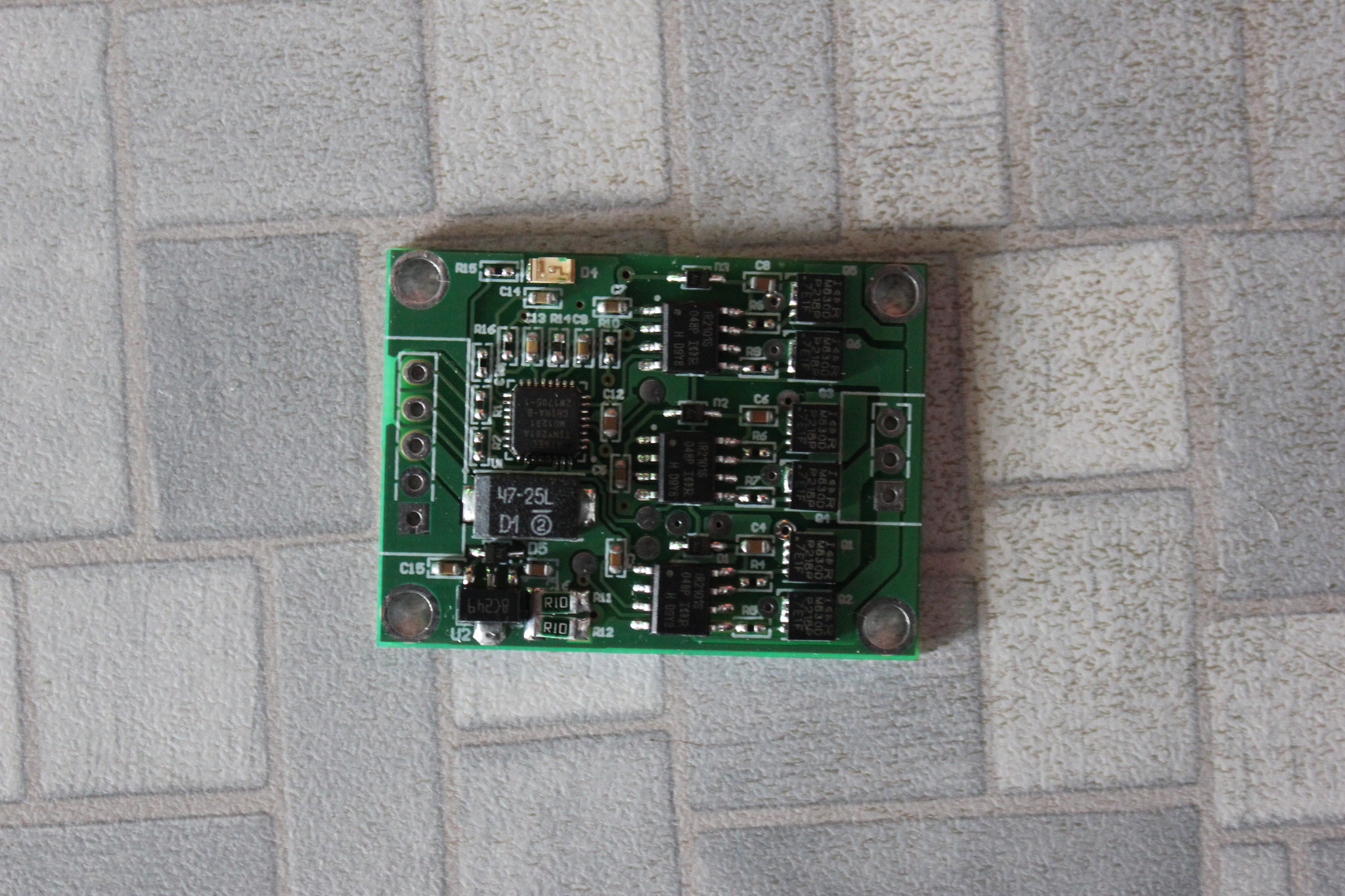 .
.
П.С. Интересно узнать альтернативные способы балансировки или ими пренебрегают получая лишний расход энергии и трудности при настройке контроллера.
Значит и корифеи этой темы, тоже балансируют с магнитной системой, пренебрегая точностью.
Подскажите пожалуйста распиновку платы третей оси
там по плате можно все вычислить …
левый (на фото ) разЪём снизу 2 земли , потом 1 питание , дальше два пина шина I2C …
где SCL а где SDA по фото невижу , но если перепутать ничего страшного небудет , просто основная плата неувидит третью ось и сенсор …
точно можно вызвонить тестером , SDA идет на 27 ногу меги SCL на 28 …
правый разЪём - мотор …
PS: разЪём сделан правильно с точки зрения безопасности … по тому-же принципу что и разЪём для серв … еслим воткнуть нетой стороной то ничего не сгорит …
Поставил 3-ю ось


Все работает отлично, единственное чего пока не пойму - при включении подвеса, YAW запоминается в том направлении в котором он находился, затем при развороте коптера по YAW он четко держит камеру мордой вперед, а мне нужно чтоб он следовал развороту коптера, ну и не пойму в версии 2.1 это что невозможно? Или я чего то не понял 😉
у и не пойму в версии 2.1 это что невозможно?
Возможно. в вкладке пульт RC ,поставте по yaw следовать 100%
Поставил 3-ю ось
Все работает отлично, единственное чего пока не пойму - при включении подвеса, YAW запоминается в том направлении в котором он находился, затем при развороте коптера по YAW он четко держит камеру мордой вперед, а мне нужно чтоб он следовал развороту коптера, ну и не пойму в версии 2.1 это что невозможно? Или я чего то не понял 😉
Повесьте кнопку переключения режимов (удержание круса\следование) или просто настройте yaw следовать 100%
Штот не пойму, при
по yaw следовать 100%
камеру начинает крутить безостановочно.
Будем копать.