Подвес камеры на бесколлекторных моторах на Alexmos/Basecam

А не подскажите, что делаю не так. Есть китайский 2-ух осевой подвес с прошивкой 2.2 Алекс. не прошивается. В процессе настройки пидов случайно оторвал ЮСБ. На плате есть порт без ножек Vx Tx Vc Gnd - припаял ножки. Подключил ардуиновский 6-ти контактный кабель FTDI-USB/ В компе я вижу порт с кабелем . но ГУИ никак не реагирует на на плату.
ГУИ должно быть той же версии, что и прошивка.
ГУИ должно быть той же версии, что и прошивка.
До обрыва ЮСБ в ГУИ все показывало.
у меня тоже был обрыв разъема - притулил рукой и прошил
Друзья помогите в выборе,нужен небольшой и недорогой контролер для подвеса с небольшой курсовой камерой,моторы будут от ноутбучных сдромов(намотка звезда)пока присматриваюсь к этим двум,какой из них лучше?
1.www.aliexpress.com/item/…/1881721998.html
Вобщем, мне так и не удалось найти ПО для своего подвеса:



Думаю теперь, заказать вот такое чудо.
Подскажите пожалуйста, будет ли работать этот контроллер с теми двигателями, что стоят на подвесе ?
И будет ли толк от этого контроллера ? может есть варианты получше ?
Господа, а вот есть может и глупый вопрос, но все же:
когда калибруем аксель, после завершения по всем осям нужно нажимать записать? Тот же вопрос после калибровки гиро? Калибровка общая независимо от профиля?
И по 32 битам - при подключении внешнего датчика начинается колбасня, при выключенном все отлично. Датчик получается криво стоит? При включении датчика нужно указывать направление его установки? У меня независимо от указанного направления все работает, но с дерганьем при сильных отклонениях - это результат доверия основному датчику в большей степени, чем датчику на раме?
Думаю теперь, заказать вот такое чудо.
Подскажите пожалуйста, будет ли работать этот контроллер с теми двигателями, что стоят на подвесе ?
И будет ли толк от этого контроллера ? может есть варианты получше ?
Была такая беда. Решилась кручением пидов в гуи.
Господа, а вот есть может и глупый вопрос, но все же:
когда калибруем аксель, после завершения по всем осям нужно нажимать записать? Тот же вопрос после калибровки гиро? Калибровка общая независимо от профиля?
У меня макось и китайский подвес сетапится в гуи только из под эмулятора. на всякий пожарный жму кнопку сохранить опосля каждого действия. Иногда раза по два.
Вот собираю баблонций на 3х подвес с платкой от алекса. У них хоть софт в яве запускается нормально.
И по 32 битам - при подключении внешнего датчика начинается колбасня, при выключенном все отлично. Датчик получается криво стоит? При включении датчика нужно указывать направление его установки? У меня независимо от указанного направления все работает, но с дерганьем при сильных отклонениях - это результат доверия основному датчику в большей степени, чем датчику на раме?
Быа такая беда, правда на одном датчике. Там все было дело в настройках направления. Надо попробовать там поковырять.
на всякий пожарный жму кнопку сохранить опосля каждого действия
Ну в процессе расширенной калибровки акселя так делать нельзя - об этом написано в мануале.
Там все было дело в настройках направления.
Нее, тут другая песня. При различных настройках направления доп датчика стабилизирует одинаково со срывами в крайних положениях. Точнее не срывы, а вибрации.
Господа, а вот есть может и глупый вопрос, но все же:
когда калибруем аксель, после завершения по всем осям нужно нажимать записать? Тот же вопрос после калибровки гиро? Калибровка общая независимо от профиля?
И по 32 битам - при подключении внешнего датчика начинается колбасня, при выключенном все отлично. Датчик получается криво стоит? При включении датчика нужно указывать направление его установки? У меня независимо от указанного направления все работает, но с дерганьем при сильных отклонениях - это результат доверия основному датчику в большей степени, чем датчику на раме?
Дополнительный датчик устанавливаем как в мануале . в настройках включаем его как он установлен. ориентацию ему делаем такую же как основному. и усе! А вобще вот здесь глянь rcopen.com/forum/f123/topic303611/8921 я писал.
А вобще вот здесь глянь Подвес камеры на бесколлекторных моторах прямого привода я писал.
Это все читал,датчик стоит на отпечатанной на 3д принтере площадке, которая защелкивается на верхнюю балку под явом. И стабилизирует все нормально. Но при крайних положениях начинается тряска, в отличие от работы той же системы только с основным датчиком.
на вкладке дополнительно включал датчик?
Интересный вопрос! Какие моторы выбрать? С пустотелым валом или с обычным? Если провода пустить через пустотелый вал, то они практически не оказывают сопротивления и их очень удобно пропускать через мотор! Это хорошо. Но если надо будет заменить мотор, то будут большие проблемы с этими проводами внутри мотора.
www.ebay.com/itm/…/251453519466
Но это не главное. Как пустотелый вал по прочности? Не согнется ли от тяжелой зеркалки? Я вот только на них собрал. Статистики ни какой. Пока работает. Как дальше не знаю? Вопрос: Собирать следующий на пустотелых или на обычных?
Интересный вопрос! Какие моторы выбрать? С пустотелым валом или с обычным? Если провода пустить через пустотелый вал, то они практически не оказывают сопротивления и их очень удобно пропускать через мотор! Это хорошо. Но если надо будет заменить мотор, то будут большие проблемы с этими проводами внутри мотора.
www.ebay.com/itm/…/251453519466
Но это не главное. Как пустотелый вал по прочности? Не согнется ли от тяжелой зеркалки? Я вот только на них собрал. Статистики ни какой. Пока работает. Как дальше не знаю? Вопрос: Собирать следующий на пустотелых или на обычных?
Выдержат не волнуйся. а зачем менять двигатель?? Да и не так часто приходится менять. Не запаривайся об этом.
Олег, открой справочник по сопромату 😃 Труба по жесткости не намного уступает валу полному! ибо в твердом сплошном валу сердцевина не работает 😃
Спасибо. Все логично…
Есть, нашел ПО !!!
для вот такого контроллера:
подходит 046_B версия. Она объявлена как deprecated.
Друзья помогите в выборе,нужен небольшой и недорогой контролер для подвеса с небольшой курсовой камерой,моторы будут от ноутбучных сдромов(намотка звезда)пока присматриваюсь к этим двум,какой из них лучше?
неужто никто не сталкивался,вроде по первому-должен подойти софт от алексмос,но драйвера кажись очень слабые,у меня моторы с сопротивлением между фазой 9 ом(4.5 на обмотку)сомневаюсь что драйвер выдержит,а он сцуко если сгорит стоит как полконтроллера.по второму-пишут что стоит русскоязычный софт но что из себя представляет не известно,зато драйвера мощные и дешевые)))короче я в полном тупике(((
Под гопру3 какой не дорогой и легкий 3хосевик лучше взять? Вариантов тьма, а хочется проверенный. YAW - активный должен быть, а не как в зенмузе последнем)))
Подскажите как получить доступ (для настройки ПИД) к такой плате ( ) - оторван ЮСБ порт, пытался подключить через ардуиновский FTDI-USB кабель - порт активен, но с самой платой связи нет. До обрыва ЮСБ - все настраивалось. Заранее спасибо.
) - оторван ЮСБ порт, пытался подключить через ардуиновский FTDI-USB кабель - порт активен, но с самой платой связи нет. До обрыва ЮСБ - все настраивалось. Заранее спасибо.
Товарищи! Прошу вашей помощи! У меня не работает ось YAW. Что только не пробовал, не работает… Посмотрел внимательно на плату и у меня возникло впечатление что не хватает двух элементов как раз возле ключа оси YAW. У кого есть 32битная версия плата, посмотрите пожалуйста у себя вот это место:
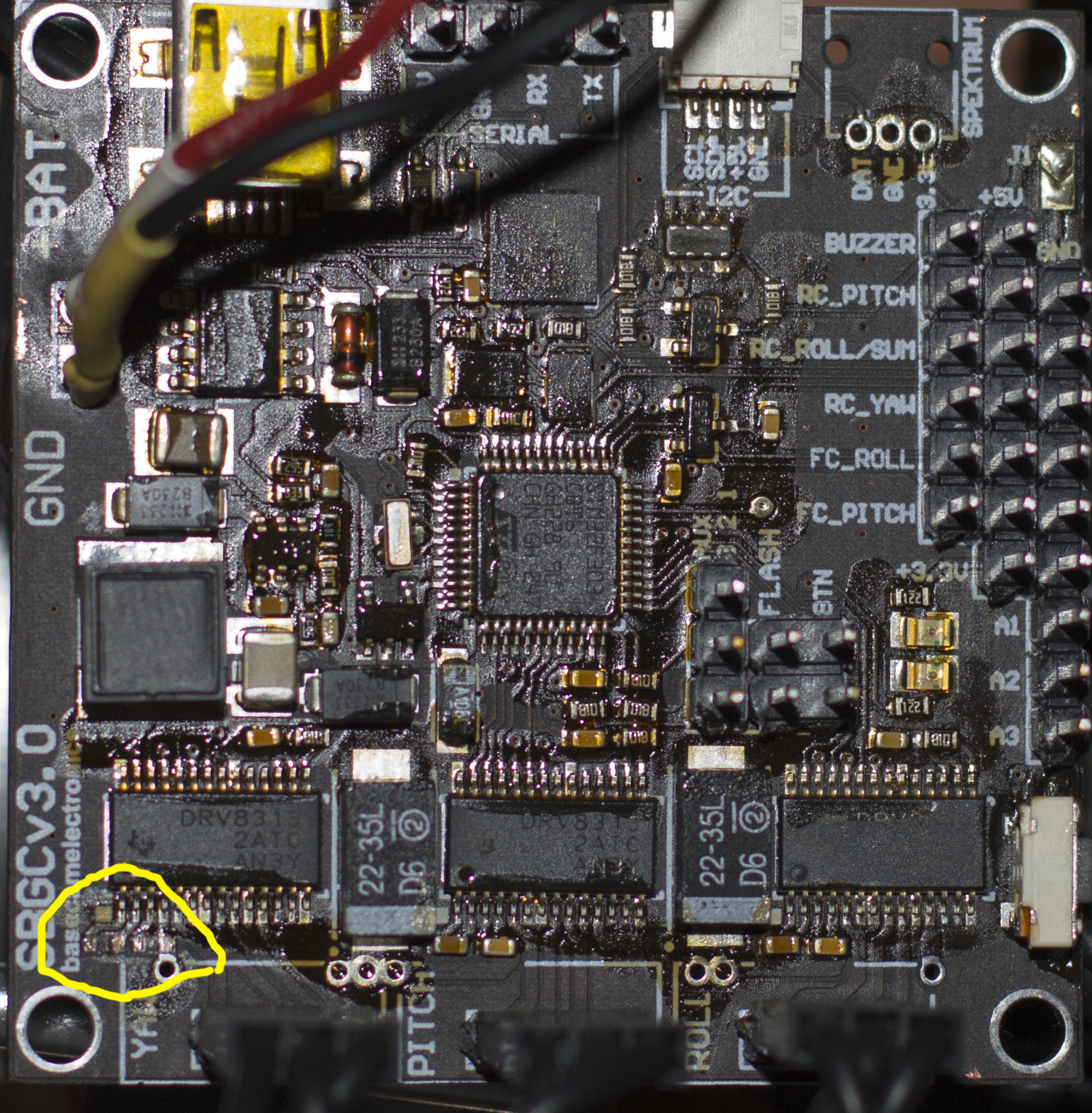
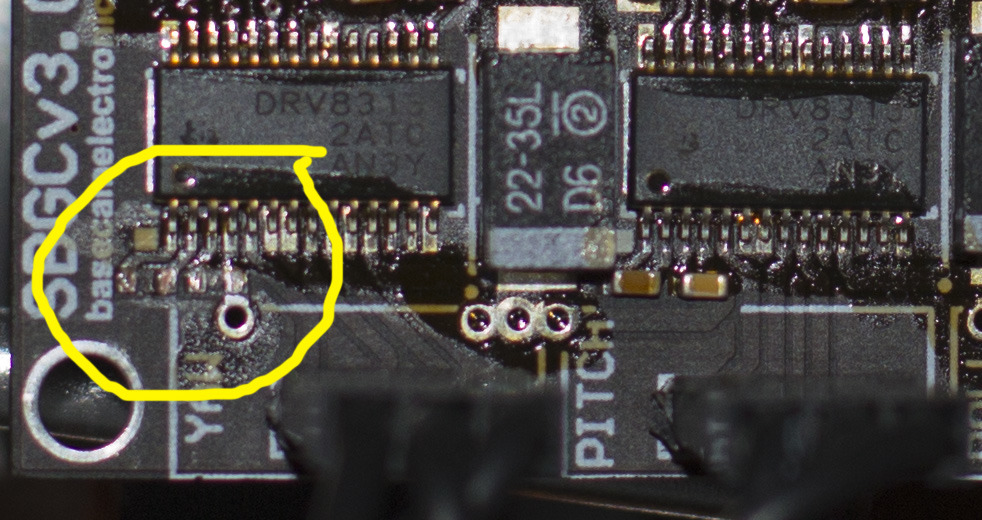
Не нашел ни одной фотографии контроллера. Но судя по этому схематичному изображению на этом месте должны быть элементы:

Кто-нибудь может подсказать что это за элементы и какого они номинала? похоже кондеры? И вообще, может ли из-за этих недостающих элементов не работать одна ось?
для начала плату помыть бы, как можно ее довести до такого состояния, или продавать если она такая была?