Стедикам из подвеса на бесколлекторных двигателях.

Проверил, болты маломагнитные. В принципе я их могу снять совсем, сенсор посажен на двусторонний скотч
У меня был магнит 10х6х4 и заработал только при расстоянии около 1.5мм, провода уже подтирали, сделал им подкладки из тефлоновой плёнки тонкой
У меня был магнит 10х6х4 и заработал только при расстоянии около 1.5мм,
Этот аналогичный, правда самая большая проблема как это все завязать . Нашел токаря бум придумывать
приветствую коллеги! наконец-то реанимировал свой стаб, всё работает, но в процессе тонкой настройки наткнулся на одну непонятную штуку. хочу использовать команду Swap RC Pith to Roll, назначил, управляю, а оно поворачивает влево на угол 60град (и моторы теряют силу, хотя по GUI они работают на полную мощность), а вправо на угол около 300град, в конце дёргается и перестаёт управляться. лимиты пробовал снимать уже везде, по всем каналам! команду Estimate Frame Angles From Motors так же пробовал, толку ноль. энкодеры использую AS5048A, с PWM. может это гистерезис? может тогда повернуть платку энкодера, чтобы мёртвая зона ушла в район 180град? какие есть идеи чтобы полностью обойти этот эффект? или может всё банальнее и у меня просто энкодеры стоят не по центру вращения моторов и это как-то влияет?
Имею аналогичный эффект, сейчас выставил магниты /энкодеры точно по центру, сегодня опробую отпишусь.
Скажите для чего нужна бывает эта команда Swap RC Pith to Roll
Можно красиво медленно подкручивать горизонт камеры, такое неплохо смотрится в попсовых музыкальных клипах
нет, нифига, я разобрался в чём проблема. слипринг, сукин сын, дохлый. в определённом положении мотора инфа с энкодера тупо перестаёт идти. буду переносить на не использованный канал, благо пара в резерве ещё есть
Пока что перевел дохлый сектор слипа в неиспользованную область положения камеры, вверх ногами. Позже переделаю, скорее всего заменю слипринг полностью
после замены слипа вскрытие произведите плиз … интересно что случилось с контактом …
да, обязательно, я ещё и за консультацией к вам обращусь, чтобы сделать всё правильно и не испортить в процессе разборки! надо же понимать, как такое вышло
я тут (на форуме) выкладывал фотки препарированного слипа …
во , нашел rcopen.com/forum/f123/topic303611/13355
разбирал на предмет добраться до второго конца оси и закрепить на ней магнит , что в принципе вполне возможно …
есть еще мысль попробовать напечатать корпуса для слипов с энкодерами или драйверами , так чтобы их ставить сверху моторов (использовать моторы с 5мм полыми валами) … может оказаться актуально для энкодерных Storm-ов (там всего 5 проводов шина , можно использовать короткие 6х слипы) …
Юрий, я не очень понимаю хода ваших мыслей по поводу встраивания магнита в слипринг. можете какой-то рисунок дать?
ну простейший способ на фото 
магнит столбик просто примагнитился к внутренней обойме подшипника , а вообще его нужно клеить к торцу оси … таким образом передается вращение с противоположного конца слипа на магнит …
вообще идея напечатать бочёнок вместо верхней крышки слипа (круглого цилиндра )… слип использовать короткий на 6 колец … провода (2 пучка) вывести вбок , это позволит минимизировать высоту … с глухого торца фрезеровка и клейка магнита Ф5х3 мм на ось , ну и все это накрывается платой типа T-Storm32 … провода от слипа (2 пучка ) распаиваются на плату а другие провода (растущие из оси) пакуются в кусочек термоусадки и продеваются через полую ось мотора (5мм) … этот провод и передается вращение на магнит …
получается накладка на мотор с слипом , энкодером и драйвером …
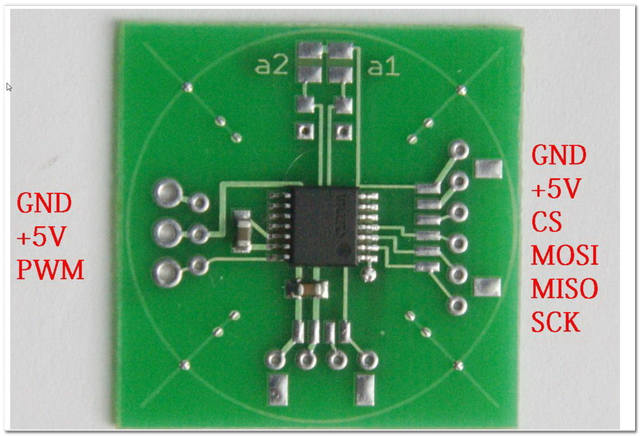
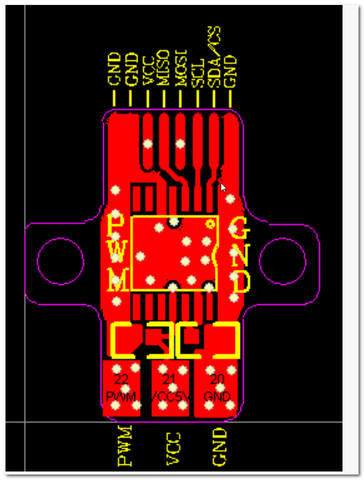
подскажите по соответствию выводов , верно ли я обозначил.
GND - GND
+5V - VCC
CS - SDA\CS
MOSI - MOSI
MISO - MISO
SCK - SCL
Приветствую форумчан. Спецы, помогите.
Beholder EC1, сгорел процессор. Заменил, прошил настроил, все заработало как надо.
И, как говорит товарищ, при очередном включении опять не работает. Опять сгорел процессор.
Подскажите, куда копать.
Видел видео, где ставят на I2C для защиты диоды или стабилитроны.
Подскажите их номинал и как правильно поставить?
Друзья, сегодня на моей самоделке помер слипринг - по ходу дела, по линии движка вышел из строя. Видать, в общем бракованный он был - вначале мертвая зона появилась по линии энкодера, а теперь с линией движка траблы. Таки худший сон сбылся - сдох стаб прямо на съёмке, на рекламе. За другим поехали, потеряли час, но все досняли. А теперь полночи менять слип, благо хоть есть на что
А теперь полночи менять слип, благо хоть есть на что
если не сложно препарируйте слипа и сделайте фотоотчет … интересно в каком состоянии контакты , возможная причина выхода из строя …
Видел видео, где ставят на I2C для защиты диоды или стабилитроны.
это не совсем диоды и стабилитроны , почитать можно например тут compel.ru/…/5-poluprovodnikovaya-zashhita-obzor-os…
на шину с уровнями 3,3 вольта нужен с самым малым напряжением пробоя (обычно начинается с 6,4 вольта ) но …
но защитит только от импульсных помех , статического электричества и тому подобного …
в случае с замыканием линий интерфейса на линию питания или силовую линию мотора оно никак не спасет …
фотоотчёт однозначно будет!
блиииин, кирдык… это не слип, во всяком случае точно не по оси ROLL. но что тогда? сейчас соберу всё обратно, попробую включить и если опять то же самое будет, запишу видео работы стаба, показания датчиков в GUI и всё остальное, может кто-то что-то подскажет
в общем пересобрал, обнаружил немного соплей, но это не о том. далее полез таки в прогу и обнаружил, что неверно было выставлено направление вращения моторов. ладно, сделал, всё работает. но беда не приходит одна))) ни с того, ни с сего у меня тупо сдыхает набортный стаб 5 вольт и мой стаб теперь работает только при подключении к компьютеру или к павербанку. вот же ж говно эти тини платы… с другой стороны очень хорошо, что всё остальное живое!
приветствую, коллеги! собираюсь делать стабилизатор под камеры типа Black Magic URSA, Red Epic и Arri Alexa Mini с порядком моторов Cam-Roll-Pitch-Yaw для работы с шестом. хочется на каждой оси использовать по два мотора, установив их разнесённо, чтобы обойтись и вовсе без дополнительных внешних подшипников. вопрос в выборе моторов, их подключении и платы управления. вот такие моторы надыбал ru.aliexpress.com/item/…/32845971509.html?algo_exp… но пока неясно, потянут ли пара таких моторов на каждой оси камеру в 7-8кг (стабилизатор будет с энкодерами, само собой), можно ли просто объединить провода моторов попарно (с соблюдением направления вращения), или там всё сложнее? так же неясно, хватит ли мощности классических плат, или нужны будут дополнительные драйвера. если да, то какие? заранее спасибо за советы!