долголеты!

Лион. Более 12.5 грамм на ватт.
Это охренительная эффективность!
Скажите в висение у меня жрет 11-12 ампер, в движение до 45км.ч 10 ампер это норм) я так то думал в висение меньше жрать должен. Начало видео взлет и небольшое висение, 4s4p 12а, вес около 1400г.
я так то думал в висение меньше жрать должен
Наоборот - это режим косого обдува, в нем расход энергии меньше, чем при висении - загуглите. Отличный результат с бустером, не в курсе, на 1Вт какая дальность?
Я могу только на 1 “пэ” уменьшать или увеличивать. А это 6 банок, т.е 300 грамм.
А сколько пэ всего?
Скажите в висение у меня жрет 11-12 ампер, в движение до 45км.ч 10 ампер это норм
Это норм.
Наоборот - это режим косого обдува, в нем расход энергии меньше, чем при висении - загуглите. Отличный результат с бустером, не в курсе, на 1Вт какая дальность?
Не знаю, 13 км улетал рсси был 60%, но на таком удаление, если апу с антенной немного наклонить, падает в 0.
Подскажите, кто-нибудь имел дело с редукторами? Я тут вертолет высчитывал, маленький двигатель и редуктор творят чудеса.
Сейчас посчитал свой коптер на 8-х пропах - по ecalc висит 70 мин, мотор 1306 3100kv на 8-х пропах, lion 3S2P, редуктор 4:1, рама печатная, нагрузка на батареи небольшая.
Сейчас собрал коптер на карбон раме 300мм, жду моторы 2204 2300, по калькулятору висение 60 мин на 8-х пропах, lion 3S3P, редуктор 2:1, нагрузка на акумы 2,8C.
На 12-х пропах с редуктором 4:1 висение показывает 90 мин! Нагрузка на батареи 3C.
Что за фантастика?
Что за фантастика?
Не фантастика, просто идеальных редукторов не бывает, а калькулятор об этом не знает…) Самая большая проблема у нас - вес и прочность редуктора, если сделать легкий пластиковый, то его порвет первая же резкая перегазовка, при порыве ветра, например… А металлический… Думаю, вес просто 4х роторов прямого привода будет не больше, чем вес четырех редукторных роторов.
Хотя, может я и ошибаюсь по поводу веса.
Что за фантастика?
Вполне возможно, что и не фантастика. Я не углублялся в характеристики модельных двигателей, но, согласно общей теории, эти моторы имеют хороший КПД в очень узком диапазоне оборотов и крутящих моментов. Гоночные квады имеют запас тяги в несколько раз больше своего веса, следовательно на висении и малых скоростях двигатели работают на достаточно низких оборотах с достаточно высоким крутящим моментом - в таком режиме кпд низкий - большАя часть энергии уходит в тепло. Если спроектировать мотор, чтобы высокий КПД был на малых оборотах при хорошем крутящем моменте - придется ставить большие магниты и мотать бОльшие катушки, тогда мотор станет тяжелым, что отрицательно повлияет на время висения. Поэтому для долголетов нащупались стандартные решения всем нам известные.
Но, если на высокооборотистый легкий двигатель с хорошим КПД на высоких оборотах и высокой мощностью, достигаемой не за счет мощных магнитов, а за счет высоких оборотов, поставить легкий редуктор с пластиковыми шестернями - то общий вес при той же мощности на низких оборотах и при достаточно высоком кпд будет ниже - следовательно будет больше и время висения.
Сумбурно получилось, но статью писать как-то лень.
если сделать легкий пластиковый, то его порвет первая же резкая перегазовка, при порыве ветра, например
Видимо поэтому и не получило распространения, но это не значит, что экспериментировать не надо ))
Есть у меня одна идея, но она требует самостоятельного изготовления двигателя. Если расположить ротор и статор по периметру внешнего диаметра пропеллера - значительно увеличится крутящий момент (т.к. радиус по сути - рычаг на который действует сила, возникающая в зазоре между постоянным магнитом и сердечником катушки). И без редукторов. Но проектированием электродвигателей к сожалению мало кто занимается по причине поганого и запутанного изложения обучающего материала, в реальности же там, как и везде все достаточно просто для понимания.
Если расположить ротор и статор по периметру внешнего диаметра пропеллера
Не понял. Мотор диаметром типа 15 дюймов?
Почему я и хочу услышать некоторые подробности, вес, потребляемую мощность, размер пропа, параметры батареи.
6S6P Li-ion Пропы 17.5" Tarot TL2948 + Tarot 4008 Martin
400гр таскать 90 мин можно, если аппарат без акума весит 1кг и меньше, по моим расчетам.
Есть у меня одна идея, но она требует самостоятельного изготовления двигателя.
контора делает кольцеобразные моторы www.thingap.com
применили на Boeing Cargo Drone

дает максимальные отношение момента к весу
6S6P Li-ion Пропы 17.5" Tarot TL2948 + Tarot 4008 Martin
400гр таскать 90 мин можно, если аппарат без акума весит 1кг и меньше, по моим расчетам.
Даст ли эта вмг 11 гр на ватт при нагрузке 800 грамм на ротор?
серьезно? это они rctimer.com/?product-922.html на 55км\час лучше всяких t-motor и пр.?
Ну вот как ни удивительно, но в висении они очень неплохи. На скорости т-моторы мне каж все-таки выигрывают.
Даст ли эта вмг 11 гр на ватт при нагрузке 800 грамм на ротор?
могу только замерами со стенда поделиться
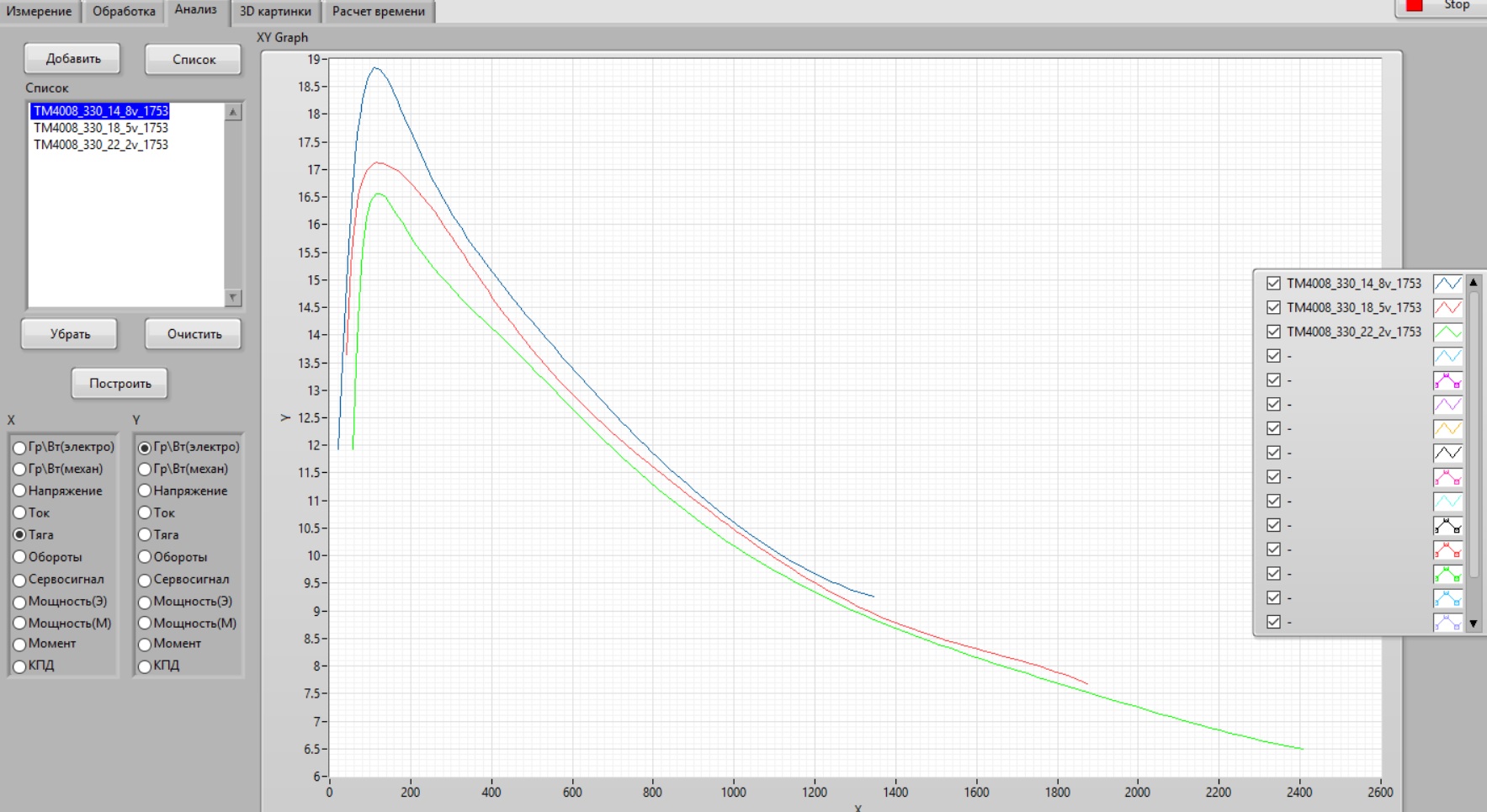
тут в архиве текстовые файлы. Столбцы по порядку тяга\момент\напряжение\ток\команда ESC\обороты yadi.sk/d/wuslSEf8H7bK6w
с квадрика замеров пока не ожидается.
Не понял. Мотор диаметром типа 15 дюймов?
Да, совершенно верно! На таком большом диаметре можно добиться кпд более 90%, возможно даже, рассчетами не проверял, можно будет сделать бесжелезный мотор - с воздушным сердечником. Преимущество такого мотора - отсутствие падения мощности на перемагничивание с ростом оборотов. С ростом оборотов такого мотора тупо пропорционально квадрату растет его мощность, практически без падения кпд
контора делает кольцеобразные моторы www.thingap.com
применили на Boeing Cargo Droneдает максимальные отношение момента к весу
Что и требовалось доказать
Подскажите, кто-нибудь имел дело с редукторами?
Была такая вмг: 1104 4000kv моторы(очень удобный вал под пиньон), 2s li-ion, 1:3.75 редуктор на обычных нейлоновых шестреренках 30 3a и 8 1.5a, полый вал 3мм, 2 подшипника 6*3*3 и пропеллер 8’ от v262, напечатанный держатель под это все.
Конфигурация рабочая и легкая, потребление примерно по ecalc выходит.
но это не значит, что экспериментировать не надо
Так я и не отговариваю…) Просто указал на возникающие сложности. Разговаривал с человеком, который пробовал, но на тот момент он не нашел подходящего решения, ни по конструкции, ни по материалам.
А кольцевые моторы да, тема. Но в изготовлении очень сложны, чем дальше движущаяся часть от подшипника, тем более высокая точность требуется…
На таком большом диаметре можно добиться кпд более 90%
Но как размещать проп, он же будет дуть в мотор?
Но как размещать проп, он же будет дуть в мотор?
Не, он будет дуть из мотора…) В центре проп на валу в подшипниках, на концах лопастей кольцо с магнитами, снаружи статор… Идеальный проп для такой конструкции - трехлопастной.
Так я и не отговариваю…)
Не, я это не вам, просто акцент сделал, мол дерзайте )) Хз у меня дойдут когда до этого руки или нет, мне самому бы хотелось в этом направлении поработать.
А кольцевые моторы да, тема. Но в изготовлении очень сложны, чем дальше движущаяся часть от подшипника, тем более высокая точность требуется…
Если делать классический двигатель с железным сердечником - да, там чем меньше зазор - тем лучше, а на большом расстоянии от оси это требует не только высокой точности изготовления, но и высокой жесткости пропеллера-ротора, т.к. под нагрузкой неминуемо будут изгибы и они явно больше, чем 0,1-0,2 мм зазора.
Но и здесь конструкция с воздушным сердечником выигрывает, т.к. не настолько требовательна к малому зазору в некоторых конструкциях. Но это уже другая тема.
Не фантастика, просто идеальных редукторов не бывает, а калькулятор об этом не знает…) Самая большая проблема у нас - вес и прочность редуктора, если сделать легкий пластиковый, то его порвет первая же резкая перегазовка, при порыве ветра, например… А металлический… Думаю, вес просто 4х роторов прямого привода будет не больше, чем вес четырех редукторных роторов.
Хотя, может я и ошибаюсь по поводу веса.
Сейчас поискал, нашел КПД прямозубой передачи = 0,97. Допустим, пластик будет 0,95.
Т. к. я связан с 3D-принтерами, могу рассказать, что в некоторых нагруженных механизмах используются нейлоновые шестерни, например стеклоподъемники, или мясорубки, не считая заводских коптеров. Печатные шестерни туда подходят отлично, т. к. у нейлона хорошая прочность и низкий коэффициент трения.
Была такая вмг: 1104 4000kv моторы(очень удобный вал под пиньон), 2s li-ion, 1:3.75 редуктор на обычных нейлоновых шестреренках 30 3a и 8 1.5a, полый вал 3мм, 2 подшипника 6*3*3 и пропеллер 8’ от v262, напечатанный держатель под это все.
Конфигурация рабочая и легкая, потребление примерно по ecalc выходит.
Сколько висит по времени измеряли? У меня по ecalc сейчас получилось 42 мин с 2S1P, при весе рамы с электроникой и редукторами 120гр. (рама 50гр, электроника 40гр, редукторы 30гр.)
при весе рамы с электроникой и редукторами 120гр
А, так Вы про игрушку говорили…) Я то все больше про нормальные аппараты думаю…) Знакомый делал редуктора под пропы 16", порвало в первом же полете. А он ни разу не новичок в коптеростроении.
В технике используются нейлоновые шестерни литые под давлением, а не печатные. Плотность материала в печатных ниже. Ну и, полиамид(нейлон) полиамиду рознь, их несколько вариантов с разными свойствами.
Но на игрушке да, вполне реально, там нагрузки допустимые для прочности редукторов.
Упоминаемый ранее в этой теме некто Dr.Claus Possberg продолжает радовать проверенными сетапами см.
все подробно даже чертеж есть
моторки от madcomponents.co MAD5008 130гр
крутит 24 пропы T-motor UL24×7.2 (Ultra Light)
крайний квадрик на MAD5010 155гр + T-motor UL28×8.4 (Ultra Light)