долголеты!

Подскажите, кто-нибудь имел дело с редукторами? Я тут вертолет высчитывал, маленький двигатель и редуктор творят чудеса.
Сейчас посчитал свой коптер на 8-х пропах - по ecalc висит 70 мин, мотор 1306 3100kv на 8-х пропах, lion 3S2P, редуктор 4:1, рама печатная, нагрузка на батареи небольшая.
Сейчас собрал коптер на карбон раме 300мм, жду моторы 2204 2300, по калькулятору висение 60 мин на 8-х пропах, lion 3S3P, редуктор 2:1, нагрузка на акумы 2,8C.
На 12-х пропах с редуктором 4:1 висение показывает 90 мин! Нагрузка на батареи 3C.
Что за фантастика?
Что за фантастика?
Не фантастика, просто идеальных редукторов не бывает, а калькулятор об этом не знает…) Самая большая проблема у нас - вес и прочность редуктора, если сделать легкий пластиковый, то его порвет первая же резкая перегазовка, при порыве ветра, например… А металлический… Думаю, вес просто 4х роторов прямого привода будет не больше, чем вес четырех редукторных роторов.
Хотя, может я и ошибаюсь по поводу веса.
Что за фантастика?
Вполне возможно, что и не фантастика. Я не углублялся в характеристики модельных двигателей, но, согласно общей теории, эти моторы имеют хороший КПД в очень узком диапазоне оборотов и крутящих моментов. Гоночные квады имеют запас тяги в несколько раз больше своего веса, следовательно на висении и малых скоростях двигатели работают на достаточно низких оборотах с достаточно высоким крутящим моментом - в таком режиме кпд низкий - большАя часть энергии уходит в тепло. Если спроектировать мотор, чтобы высокий КПД был на малых оборотах при хорошем крутящем моменте - придется ставить большие магниты и мотать бОльшие катушки, тогда мотор станет тяжелым, что отрицательно повлияет на время висения. Поэтому для долголетов нащупались стандартные решения всем нам известные.
Но, если на высокооборотистый легкий двигатель с хорошим КПД на высоких оборотах и высокой мощностью, достигаемой не за счет мощных магнитов, а за счет высоких оборотов, поставить легкий редуктор с пластиковыми шестернями - то общий вес при той же мощности на низких оборотах и при достаточно высоком кпд будет ниже - следовательно будет больше и время висения.
Сумбурно получилось, но статью писать как-то лень.
если сделать легкий пластиковый, то его порвет первая же резкая перегазовка, при порыве ветра, например
Видимо поэтому и не получило распространения, но это не значит, что экспериментировать не надо ))
Есть у меня одна идея, но она требует самостоятельного изготовления двигателя. Если расположить ротор и статор по периметру внешнего диаметра пропеллера - значительно увеличится крутящий момент (т.к. радиус по сути - рычаг на который действует сила, возникающая в зазоре между постоянным магнитом и сердечником катушки). И без редукторов. Но проектированием электродвигателей к сожалению мало кто занимается по причине поганого и запутанного изложения обучающего материала, в реальности же там, как и везде все достаточно просто для понимания.
Если расположить ротор и статор по периметру внешнего диаметра пропеллера
Не понял. Мотор диаметром типа 15 дюймов?
Почему я и хочу услышать некоторые подробности, вес, потребляемую мощность, размер пропа, параметры батареи.
6S6P Li-ion Пропы 17.5" Tarot TL2948 + Tarot 4008 Martin
400гр таскать 90 мин можно, если аппарат без акума весит 1кг и меньше, по моим расчетам.
Есть у меня одна идея, но она требует самостоятельного изготовления двигателя.
контора делает кольцеобразные моторы www.thingap.com
применили на Boeing Cargo Drone

дает максимальные отношение момента к весу
6S6P Li-ion Пропы 17.5" Tarot TL2948 + Tarot 4008 Martin
400гр таскать 90 мин можно, если аппарат без акума весит 1кг и меньше, по моим расчетам.
Даст ли эта вмг 11 гр на ватт при нагрузке 800 грамм на ротор?
серьезно? это они rctimer.com/?product-922.html на 55км\час лучше всяких t-motor и пр.?
Ну вот как ни удивительно, но в висении они очень неплохи. На скорости т-моторы мне каж все-таки выигрывают.
Даст ли эта вмг 11 гр на ватт при нагрузке 800 грамм на ротор?
могу только замерами со стенда поделиться
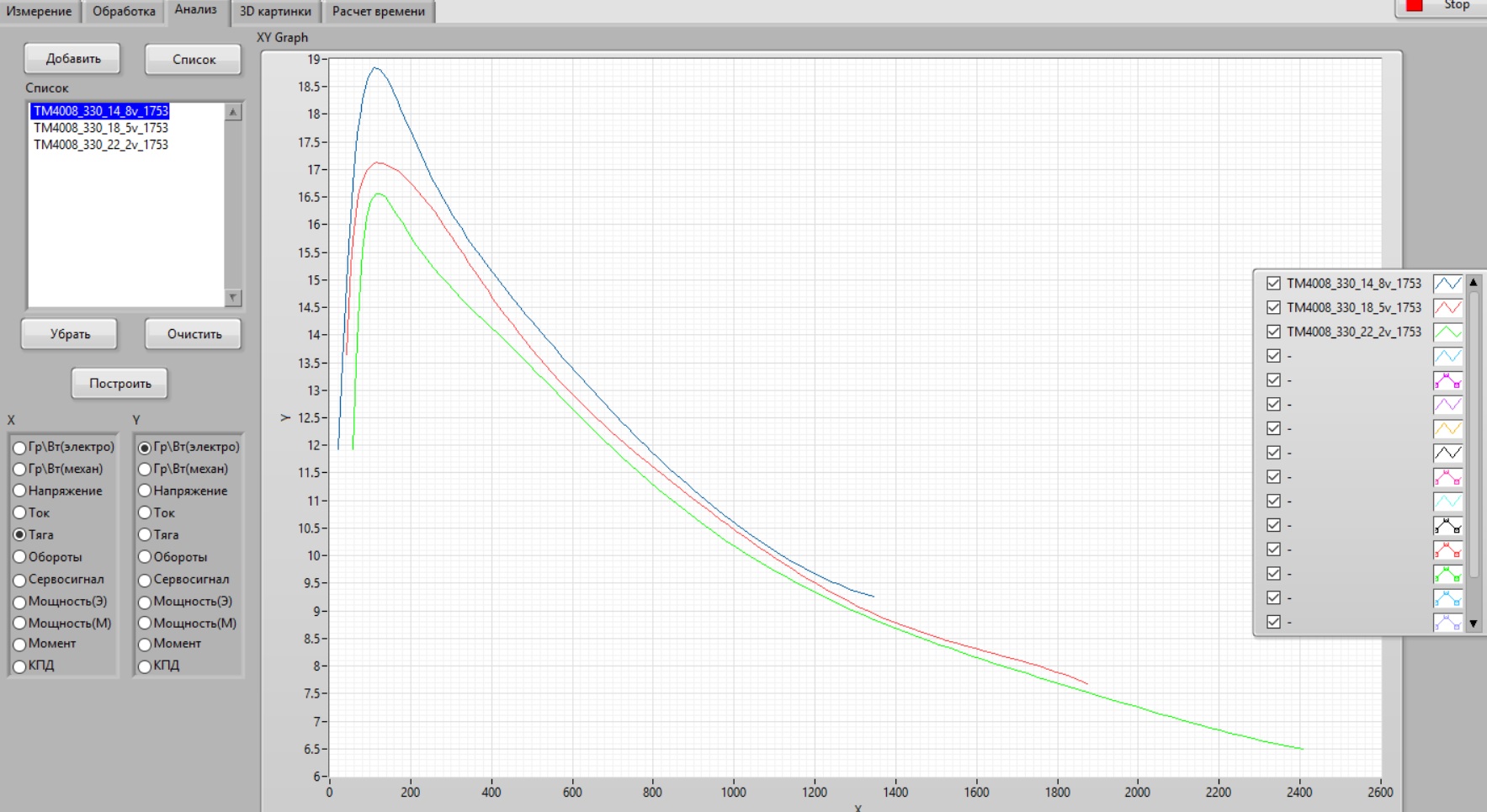
тут в архиве текстовые файлы. Столбцы по порядку тяга\момент\напряжение\ток\команда ESC\обороты yadi.sk/d/wuslSEf8H7bK6w
с квадрика замеров пока не ожидается.
Не понял. Мотор диаметром типа 15 дюймов?
Да, совершенно верно! На таком большом диаметре можно добиться кпд более 90%, возможно даже, рассчетами не проверял, можно будет сделать бесжелезный мотор - с воздушным сердечником. Преимущество такого мотора - отсутствие падения мощности на перемагничивание с ростом оборотов. С ростом оборотов такого мотора тупо пропорционально квадрату растет его мощность, практически без падения кпд
контора делает кольцеобразные моторы www.thingap.com
применили на Boeing Cargo Droneдает максимальные отношение момента к весу
Что и требовалось доказать
Подскажите, кто-нибудь имел дело с редукторами?
Была такая вмг: 1104 4000kv моторы(очень удобный вал под пиньон), 2s li-ion, 1:3.75 редуктор на обычных нейлоновых шестреренках 30 3a и 8 1.5a, полый вал 3мм, 2 подшипника 6*3*3 и пропеллер 8’ от v262, напечатанный держатель под это все.
Конфигурация рабочая и легкая, потребление примерно по ecalc выходит.
но это не значит, что экспериментировать не надо
Так я и не отговариваю…) Просто указал на возникающие сложности. Разговаривал с человеком, который пробовал, но на тот момент он не нашел подходящего решения, ни по конструкции, ни по материалам.
А кольцевые моторы да, тема. Но в изготовлении очень сложны, чем дальше движущаяся часть от подшипника, тем более высокая точность требуется…
На таком большом диаметре можно добиться кпд более 90%
Но как размещать проп, он же будет дуть в мотор?
Но как размещать проп, он же будет дуть в мотор?
Не, он будет дуть из мотора…) В центре проп на валу в подшипниках, на концах лопастей кольцо с магнитами, снаружи статор… Идеальный проп для такой конструкции - трехлопастной.
Так я и не отговариваю…)
Не, я это не вам, просто акцент сделал, мол дерзайте )) Хз у меня дойдут когда до этого руки или нет, мне самому бы хотелось в этом направлении поработать.
А кольцевые моторы да, тема. Но в изготовлении очень сложны, чем дальше движущаяся часть от подшипника, тем более высокая точность требуется…
Если делать классический двигатель с железным сердечником - да, там чем меньше зазор - тем лучше, а на большом расстоянии от оси это требует не только высокой точности изготовления, но и высокой жесткости пропеллера-ротора, т.к. под нагрузкой неминуемо будут изгибы и они явно больше, чем 0,1-0,2 мм зазора.
Но и здесь конструкция с воздушным сердечником выигрывает, т.к. не настолько требовательна к малому зазору в некоторых конструкциях. Но это уже другая тема.
Не фантастика, просто идеальных редукторов не бывает, а калькулятор об этом не знает…) Самая большая проблема у нас - вес и прочность редуктора, если сделать легкий пластиковый, то его порвет первая же резкая перегазовка, при порыве ветра, например… А металлический… Думаю, вес просто 4х роторов прямого привода будет не больше, чем вес четырех редукторных роторов.
Хотя, может я и ошибаюсь по поводу веса.
Сейчас поискал, нашел КПД прямозубой передачи = 0,97. Допустим, пластик будет 0,95.
Т. к. я связан с 3D-принтерами, могу рассказать, что в некоторых нагруженных механизмах используются нейлоновые шестерни, например стеклоподъемники, или мясорубки, не считая заводских коптеров. Печатные шестерни туда подходят отлично, т. к. у нейлона хорошая прочность и низкий коэффициент трения.
Была такая вмг: 1104 4000kv моторы(очень удобный вал под пиньон), 2s li-ion, 1:3.75 редуктор на обычных нейлоновых шестреренках 30 3a и 8 1.5a, полый вал 3мм, 2 подшипника 6*3*3 и пропеллер 8’ от v262, напечатанный держатель под это все.
Конфигурация рабочая и легкая, потребление примерно по ecalc выходит.
Сколько висит по времени измеряли? У меня по ecalc сейчас получилось 42 мин с 2S1P, при весе рамы с электроникой и редукторами 120гр. (рама 50гр, электроника 40гр, редукторы 30гр.)
при весе рамы с электроникой и редукторами 120гр
А, так Вы про игрушку говорили…) Я то все больше про нормальные аппараты думаю…) Знакомый делал редуктора под пропы 16", порвало в первом же полете. А он ни разу не новичок в коптеростроении.
В технике используются нейлоновые шестерни литые под давлением, а не печатные. Плотность материала в печатных ниже. Ну и, полиамид(нейлон) полиамиду рознь, их несколько вариантов с разными свойствами.
Но на игрушке да, вполне реально, там нагрузки допустимые для прочности редукторов.
Упоминаемый ранее в этой теме некто Dr.Claus Possberg продолжает радовать проверенными сетапами см.
все подробно даже чертеж есть
моторки от madcomponents.co MAD5008 130гр
крутит 24 пропы T-motor UL24×7.2 (Ultra Light)
крайний квадрик на MAD5010 155гр + T-motor UL28×8.4 (Ultra Light)
Упоминаемый ранее в этой теме некто Dr.Claus Possberg продолжает радовать проверенными сетапами см.
Оно конечно рекорд, но мне кажется, так не очень интересно. Ну две палки, пропы побольше, моторы поплоще, батарея на 30ампер. Это все довольно банально и дальнейшие рекорды можно ставить, продолжая увеличивать пропы и т.д. Нет изюминки какой-то, нет технического “подвига”, как нет и хотя бы минимального прикладного аспекта. Это конечно мое личное мнение.
Оно конечно рекорд, но мне кажется, так не очень интересно. Ну две палки, пропы побольше, моторы поплоще, батарея на 30ампер. Это все довольно банально и дальнейшие рекорды можно ставить, продолжая увеличивать пропы и т.д. Нет изюминки какой-то, нет технического “подвига”, как нет и хотя бы минимального прикладного аспекта. Это конечно мое личное мнение.
Не все “пропы побольше” и “моторы поплоще” одинаково полезны.
Рекордные аппараты имеют комплектующие и технические решения обладающие исключительными характеристиками. Применение их в аппаратах с полезной нагрузкой также дает более долголетающий аппарат, если делать это с умом и расчетами. Поэтому весьма ценной информацией является какие именно комплектующие и технические решения там используются.
Проилюстрирую примерами.
Более раннее видео Dr.Claus Possberg
Пропы 30 дюймов, а время меньше чем на 24 дюймовых. Как так то?! Еще и моторы дорогие T-motor U8 100kv. Этот аппарат дороже, больше, тяжелее, а суммарная эффективность ниже!
Для задачи таскания FPV набора весом не доходящим и до 100гр, вариант квадрокоптера на 24 пропах Ultra Light и моторах MAD5008, выигрышный в большинстве вопросов. До какого порога массы полезной нагрузки будет выигрыш надо считать.
Сами пропеллеры Ultra Light просто легче в 2 раза, но имеют предельную нагрузку 8кг на проп. Применение их однозначно улучшит ваш аппарат, если вопрос цены не стоит.
Если взлетный вес аналогично рекордному 3900грто моторы MAD5008 весом 130гр будет сильно выигрышным решением в паре с упомянутыми 24 пропами. Во взлетный вес не обязательно засовывать по максимуму аккумулятор. Можно малую часть отдать под полезную нагрузку и аппарат по прежнему будет максимально эффективен в своем классе.
Еще про разницу
Разница у дешевых пропеллеров в геометрии на стенде

yadi.sk/a/…/5aeb7f6b0e53770cbfd747df
на внешний вид

yadi.sk/a/…/5aeb7f6b0e53770cbfd747e4
Купив рандомный дешевый большой проп велика вероятность получить гумно
А вот для примера 2 мотора tarot 4006
www.tarotrc.com/Product/Detail.aspx?Lang=en&Id=fcb…

Редкое гумно по КПД на всем диапозоне и моменту. Вес 82гр
www.tarotrc.com/Product/Detail.aspx?Lang=en&Id=a93…

отличный по моменту и КПД для своего веса 71гр.
В паре с дорогими пропами TL2947 будет рекордый аппарат с полезной нагрузкой. Как и его старший брат 4008 с TL2948 см. ранее rcopen.com/forum/f123/topic345331/6236
Мой тестовый аналог по расчетам может тягать 1кг 1 час
Тут на фото он с 2.5кг, что больше собственного веса с акумом. Это как пример запаса “мощи” для “прикладного аспекта”.

То есть грузолет-долголет вполне реален. И часто это одни и те же комплектующие, найденные если не за счет “технического подвига”, то как минимум за счет траты кучи средвст, сил, времени и пр.
PS тут Dr.Claus Possberg
написал что квадрик с 18ми пропами у нго таскает подвес Zenmuse с камерой Gopro 4 80мин
Все хорошо, но картинка все равно дрожит )
Все хорошо, но картинка все равно дрожит )
это проблема подвеса\камеры\оптической\цифровой стабилизации\цифровой обработки
я проверял с mavic air


см rcopen.com/forum/f123/topic466170/1188
Там где наши подвесы не работают, их подвесы\камеры не замечают большинства проблем.
Реально надо сильно постараться, что бы у них в видеоряде появились косяки.
Но Джи утверждает, что на Мавике нет потоковой стабилизации!
Вчера тестировал Гоупро с потоковой стабилизацией в 4К - картинка четкая, как у Фантома, но к сожалению все равно нужен подвес, потому что горизонт уходит.