STorM32 BGC: 3-Axis STM32 Brushless Gimbal Controller

И все таки может кто скажет какие моторы (2206 100t или 2804 160t) лучше для этого подвеса/контроллера ?
Бери те, которые легче. Борись за каждый грамм!
как новый камень прошить?
пост 1341 пол страницы ниже, все по русски написано.
Здравия всем присутствующим!
Первым пришел подвес 3х-осевой HAKRC Storm32 3, а коптер еще не прослеживается даже.

Смотрю на его, читаю тему и не могу понять - до прибытия коптера мне надо что-то настраивать в нем, тюнить или не надо парить моск?
Извиняйте, если не в ту тему залепил - не со зла я, т.к. дело новое…
Ну и?
Ну и?
Не вкурю - нужна настройка подвеса под мою камеру, так? Там сплошняком идет настройка параметров подвеса - т.е. мне его надо как-то к компу соединить ведь.
У меня есть батарея 12v от мотоцикла - может запитать его для начала?
На какие штыри подать?
Лучше не парить пока, если это первый такой аппарат. Сначала надо понять, что бы хотелось изменить, а потом уже пытаться менять.
Мну вот допарился, пришлось менять проц и т. д.
Если все таки надумаете, сначала полностью разберитесь в описаниях к нему.
нужна настройка подвеса под мою камеру, так?
Совершенно верно. Индивидуально под каждую камеру.
Сначала добиться идеального балланса.
Напряжение питания должно быть таким же, как и в конечном сетапе. На Вашей фотографии красный разъем - питание. Чёрный “-”, красный - “+”.
Насчёт питания от мотоцикла - спросите электронщиков. Я так никогда не делал.
Чтобы Ваш подвес хорошо заработал - очень важно верная баллансировка и калибровка акселерометра. Если не уверены, что сможете сделать очень точно 6-ти позиционную калибровку, то лучше остановиться на простой, в одну позицию. Для 6-ти точек я на ЧПУ сделал кубик с площадкой внутри, куда устанавливается аксель и затем на плоскости выверенной уровнем делал калибровку.
Ну и дальше - PIDы настраивать. В статье это подробно рассказано. Ничего сложного.
Большой сенкс за ликбез!
К ЧПУ у меня доступа нет - наврядли я буду для калибровки что-то такое точить.
АКБ 12,4V если память не изменяет (могу тестером промерить позже).
Сейчас мне надо камеру установить понадежнее, т.к. при имеющейся липучке она не ставится до правого упора и болтается.
Затем я могу запитать его - что я увижу тогда?
Еще в комплекте есть разноцветный шлейф, а на плате - miniUSB.
Наверное какой-то софт нужен для коннекта?
Чота путано там как-то все…😵
USB-TTL адаптор постоянно фигурирует - у меня нет такого.
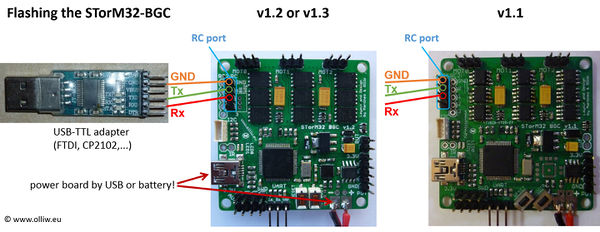
С подвесом есть листок, на котором указана
firmvare: o0323bgc v090
Hardvare V130
v090 от 10 января 2016 как я понял. В мануале по ссылке выше сказано, что надо прошить на последнюю.
надо прошить
Да не надо, тем более, что у Вас FTDI нет. Нормальная версия v0.90
Вот софт под неё - здесь
Просто подключите контроллер USB шнурком, распакуйте и запустите софт, выберите COM-порт, к которому ваш контроллер подключился и всё.
Внешнее питание для контроллера понадобиться только на этапе настройки PID’ов - чтобы моторы крутить.
KirS, большой сенкс за разъяснения - все получилось!
Теперь можно подать питание и проверить его работу?
USB надо отключать?
Подвес надо вывесить или как-то закрепить?
Пожалуйста 😃
12v и USB могут быть одновременно. Во всяком случае ни один из моих подвесов на это не обижался. Главное полярность ! 😃
В софте есть вкладка Configure gimbal или как-то так и в ней кнопка начальной авто-настройки. Посмотрите в доках, что я присылал.
Подвес при включении ВСЕГДА должен быть неподвижен. Иначе не пройдёт инициализация. Это всего 10-20 сек
Сегодня пришел модуль IMU NT v2. На днях буду тестить. Если все будет хорошо скажу ферритам и косичкам пока. 😃
www.youtube.com/watch?v=r0ym9o70tVU
периодически заваливается горизонт. причем может это произойти, а может и не произойти
вот на видео: высоту набираю до 250 метров, как только перестаю набирать высоту (т.е. останавливаюсь) горизонт плавно начинает заваливаться
как только спущусь до 20 метров, горизонт в порядке
оба IMU откалибровал по 6 осям
второй IMU включен в настройках
в чем может быть проблема?
IMU NT v2
а где покупали ?
На официальной вики Olliw есть ссылка на инет-магаз www.ensys.lt. Там и заказал. Дошло за 2 недели.
оба IMU откалибровал по 6 осям
второй IMU включен в настройкахв чем может быть проблема?
У Вас случайно PAN по роллу не выставлен?
доброго времени суток! Страниц 10 назад писал я что хочу сделать себе стадикам для экшен камеры. У меня были проблемы с 2 сенсором, вернее я его получил на днях. взял паяльник сделал прочное соединение, включаю пытаюсь настроить PID согласно инструкции на сайте, все хорошо идет и сделав пару наклонов всей конструкции снова начались хаотичные движения всех моторов.
Отложил шайтан в угол, чтоб не натворить с горяча ничего. спустя время я подключил только USB кабель и включил Data Display. При кручении подставки для камеры (мотора оси Pitch) на видео будет видно как ведет себя кривая (красная линия) примерно на 16 секунде. я плавно кручу по оси и в определенном месте линия прыгает вниз будто перевернулся сенсор. Сенсор на мягком проводе и возле платы контроллера сделано 2 витка на ферритовое кольцо.
куда мне копать что настраивать, мне кажется из-за этого сбоя в координатах начинает дергаться вся конструкция. Сенсоры оба показывают нормальные показания но в определенных углах поворота они скидывают линию с верху вниз.
Причем это я наблюдал на всех линиях будто есть критическая точка в которой такое происходит.
стадикам для экшен камеры
я так понимаю что стедик должен работать в связке с вторым сенсором как на этом видео?
если так то там же и можно посмотреть как настроить контроллер под такую работу, у меня получилось! причем у меня версия другая, не та что на видео