STorM32 BGC: 3-Axis STM32 Brushless Gimbal Controller

Чота путано там как-то все…😵
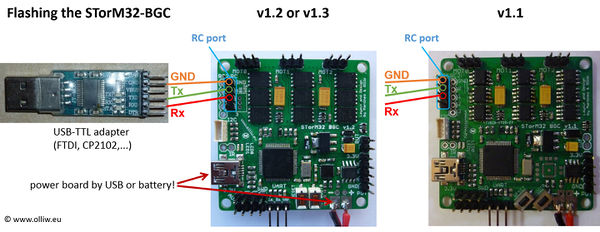
USB-TTL адаптор постоянно фигурирует - у меня нет такого.
С подвесом есть листок, на котором указана
firmvare: o0323bgc v090
Hardvare V130
v090 от 10 января 2016 как я понял. В мануале по ссылке выше сказано, что надо прошить на последнюю.
надо прошить
Да не надо, тем более, что у Вас FTDI нет. Нормальная версия v0.90
Вот софт под неё - здесь
Просто подключите контроллер USB шнурком, распакуйте и запустите софт, выберите COM-порт, к которому ваш контроллер подключился и всё.
Внешнее питание для контроллера понадобиться только на этапе настройки PID’ов - чтобы моторы крутить.
KirS, большой сенкс за разъяснения - все получилось!
Теперь можно подать питание и проверить его работу?
USB надо отключать?
Подвес надо вывесить или как-то закрепить?
Пожалуйста 😃
12v и USB могут быть одновременно. Во всяком случае ни один из моих подвесов на это не обижался. Главное полярность ! 😃
В софте есть вкладка Configure gimbal или как-то так и в ней кнопка начальной авто-настройки. Посмотрите в доках, что я присылал.
Подвес при включении ВСЕГДА должен быть неподвижен. Иначе не пройдёт инициализация. Это всего 10-20 сек
Сегодня пришел модуль IMU NT v2. На днях буду тестить. Если все будет хорошо скажу ферритам и косичкам пока. 😃
www.youtube.com/watch?v=r0ym9o70tVU
периодически заваливается горизонт. причем может это произойти, а может и не произойти
вот на видео: высоту набираю до 250 метров, как только перестаю набирать высоту (т.е. останавливаюсь) горизонт плавно начинает заваливаться
как только спущусь до 20 метров, горизонт в порядке
оба IMU откалибровал по 6 осям
второй IMU включен в настройках
в чем может быть проблема?
IMU NT v2
а где покупали ?
На официальной вики Olliw есть ссылка на инет-магаз www.ensys.lt. Там и заказал. Дошло за 2 недели.
оба IMU откалибровал по 6 осям
второй IMU включен в настройкахв чем может быть проблема?
У Вас случайно PAN по роллу не выставлен?
доброго времени суток! Страниц 10 назад писал я что хочу сделать себе стадикам для экшен камеры. У меня были проблемы с 2 сенсором, вернее я его получил на днях. взял паяльник сделал прочное соединение, включаю пытаюсь настроить PID согласно инструкции на сайте, все хорошо идет и сделав пару наклонов всей конструкции снова начались хаотичные движения всех моторов.
Отложил шайтан в угол, чтоб не натворить с горяча ничего. спустя время я подключил только USB кабель и включил Data Display. При кручении подставки для камеры (мотора оси Pitch) на видео будет видно как ведет себя кривая (красная линия) примерно на 16 секунде. я плавно кручу по оси и в определенном месте линия прыгает вниз будто перевернулся сенсор. Сенсор на мягком проводе и возле платы контроллера сделано 2 витка на ферритовое кольцо.
куда мне копать что настраивать, мне кажется из-за этого сбоя в координатах начинает дергаться вся конструкция. Сенсоры оба показывают нормальные показания но в определенных углах поворота они скидывают линию с верху вниз.
Причем это я наблюдал на всех линиях будто есть критическая точка в которой такое происходит.
стадикам для экшен камеры
я так понимаю что стедик должен работать в связке с вторым сенсором как на этом видео?
если так то там же и можно посмотреть как настроить контроллер под такую работу, у меня получилось! причем у меня версия другая, не та что на видео
Новый NT IMU введен в эксплуатацию
Прошил прошивку 2.03 NT, все определилось без проблем.
Итог: ферриты не нужны, любой длины провода можно укладывать как угодно. Цена вопроса 11 + 1 евро
любой длины провода можно укладывать как угодно
О, это хорошо. А меня что-то надоело возиться с путающимися пучками кабелей - заказал моторчики с трубчатой осью - буду все провода напрямую пропускать когда придут. На али сейчас какие-то странные продавцы продают по 7.78$ за штуку - посмотрю что придёт 😃
На али сейчас какие-то странные продавцы продают по 7.78$ за штуку
А поделитесь ссылкой.
А поделитесь ссылкой.
www.aliexpress.com/item/…/32694896340.html
www.aliexpress.com/item/…/32694844101.html
тут вообще за 7.27$
Добрый день! Пытаюсь настроить управление по Питч с приемника… сигнал беру с выводов Gnd, RC-0 … какие установки и в какой закладке надо сделать??? А правда что если отпаять Блютуз то контроллер будет запускаться быстрее?
Спасибо за советы… разобрался сам
Друзья! Может кто подскажет всё-таки… Тряска домогает по питчу. Прочитал много, пытался менять ПИДы по разному: и уменьшать и увеличивать, менять мощность двигателей, ставить разные демпферы. Всё одна ерунда - трясёт. В ветер намного сильнее. 2-х осевой подвес без тряски (там понятно свои минусы есть). Что-то можно ещё попробовать?
Вибрацию убирайте
Братцы, а у кого шторм на 4S летает ? Перешел с 3s на 4s так не могу понять отчего подвес вырубается. Почему-то на 4s начинают переть ошибки по I2C,причем не сразу а через пару минут. На 3s все в порядке, подскажите кто знает.
PS Чет dc-dc не охота ставить - лишний вес и КПД меньше…
PS Воспользовался поиском, понял что больше 12 В лучше не подавать. Вопрос закрыт .
КПД ничего не меньше , зато линейность выше и даже лучше ,а вес какой вес -dc dc весит 2гр .