STorM32 BGC: 3-Axis STM32 Brushless Gimbal Controller

Паять проц не осилю, буду покупать контроллер в сборе.
Тем более, он не так уж и дорого стоит. В районе двадцатки раньше было.
Тем более, он не так уж и дорого стоит. В районе двадцатки раньше было.
У меня таже самая проблема, заказал новую плату
В твоем случае теперь надо вычислить виновника.
Есть очень злобный способ 😃 Взять лабораторный блок питания, выставить выходное 3.3 и ток ампер на 5 😃 Подать напрямую на шину 3.3.
С 99% вероятностью после этого больная деталька испустит волшебный дым, после чего её можно будет спокойно поменять 😃
Для меня он не нов, я так обычно ищу пробитую керамику на бучных материнках.
Но я не стал его рекомендовать ввиду неопределенной квалификации пользователя 😃
Вот, полетал в пасмурную погоду с данным подвесом и камерой GitUp Git2
Горизонт надо лечить. А по стабильности мне очень даже нра.
Есть кто подключал подвес Hakrc Storm32 к второму фантику? Не разберусь как подключить его для управления
Вот, полетал в пасмурную погоду с данным подвесом и камерой GitUp Git2
Горизонт надо лечить. А по стабильности мне очень даже нра.
По стабильности вопросов к нему нет, а вот с горизонтом пока нет таблетки 😦 откалибровал контролер и датчик по одной точке, изменений не обнаружил. Если бы был уверен , что то измениться после калибровки по 6-ти точкам то занялся бы этим , а так разбирать полностью лень. А кто нибудь калибровал по 6-ти точкам с результатом по лечению завала ?
По стабильности вопросов к нему нет, а вот с горизонтом пока нет таблетки 😦 откалибровал контролер и датчик по одной точке, изменений не обнаружил. Если бы был уверен , что то измениться после калибровки по 6-ти точкам то занялся бы этим , а так разбирать полностью лень. А кто нибудь калибровал по 6-ти точкам с результатом по лечению завала ?
Эх молодежь молодежь 😃
Во первых для калибровки по 6 точкам ничего разбирать не надо, главное горизонт точно выставить, ну и перевертыш на 180, остальное примерно выставляется. Только на приведенном примере проблем с горизонтом не наблюдается, есть проблемы с его удержанием на разворотах. А это лечится увеличением Imu AHRS во вкладке Setup. При увеличении до максимума возможны проблемы с удержание ява, поэтому если что уменьшать по одной секунде пока проблема с явом не рассосется, у меня уже на 24секах нормально (максимум 25 сек) Метод компенсации у меня advansed.
как основной сенсор поставил NT, прокачал…, второй датчик - который встроен в плату. Вроде все работает, но не влияет ли это на работу контроллера, то что датчики разной конфигурации?
все так же борюсь с ЯВ, при отклонении по яв на 30 градусов (принудительно) не возвращается в исходную точку… Чё делать?
Эх молодежь молодежь 😃
Во первых для калибровки по 6 точкам ничего разбирать не надо, главное горизонт точно выставить, ну и перевертыш на 180, остальное примерно выставляется. Только на приведенном примере проблем с горизонтом не наблюдается, есть проблемы с его удержанием на разворотах. А это лечится увеличением Imu AHRS во вкладке Setup. При увеличении до максимума возможны проблемы с удержание ява, поэтому если что уменьшать по одной секунде пока проблема с явом не рассосется, у меня уже на 24секах нормально (максимум 25 сек) Метод компенсации у меня advansed.
Да уже откалибровался благополучно по 6 ти точкам, горизонт идеально держит. При разворотах немного плывет, попробую воспользоваться увеличением Imu AHRS.
Во первых для калибровки по 6 точкам ничего разбирать не надо, главное горизонт точно выставить, ну и перевертыш на 180, остальное примерно выставляется.
А во вторых, это полностью ошибочное убеждение. Калибровать по 6-ти точкам нужно ИДЕАЛЬНО, иначе в этом вообще смысла нет, лучше сделать 1-дно точечную. Специально у Олли выяснял, это его слова. И еще вы наверняка не знаете, что качество калибровки можно посмотреть, и сразу будет видно - хорошо получилось, или отстойно. У меня первый раз на кубике получилось очень плохо. Пришлось изобретать другие способы.
Так что смело вступаем в ряды молодежи.
Да уже откалибровался благополучно по 6 ти точкам, горизонт идеально держит. При разворотах немного плывет, попробую воспользоваться увеличением Imu AHRS.
Ну вот у меня не плывет, после правильной калибровки.
что качество калибровки можно посмотреть
откройте секрет - КАК?
У меня нет гуи перед глазами, но там написано.
что качество калибровки можно посмотреть, и сразу будет видно - хорошо получилось, или отстойно
У меня нет гуи перед глазами, но там написано.
а там это где?
Обращаюсь к пользователям версии NT
как основной сенсор поставил NT, прокачал…, второй датчик - который встроен в плату. Вроде все работает, но не влияет ли это на работу контроллера, то что датчики разной конфигурации?
все так же борюсь с ЯВ, при отклонении по яв на 30 градусов (принудительно) не возвращается в исходную точку… Чё делать?
Вроде все работает, но не влияет ли это на работу контроллера, то что датчики разной конфигурации?
Нет. У меня так же.
Кто-нибудь подключал контроллер к полетнику pixhawk по i2c? По идее, это должно положительно сказываться на удержании горизонта, нет?
мужики а можно пару вопросов по поводу NT версии, давно не интересовался контроллером, смотрю многое поменялось и NT стала основной прошивки под i2c больше не обновляются ?
чё то я не много не въехал не ужели теперь чтоб запустить надо кучу плат как вот на этой картинке ?
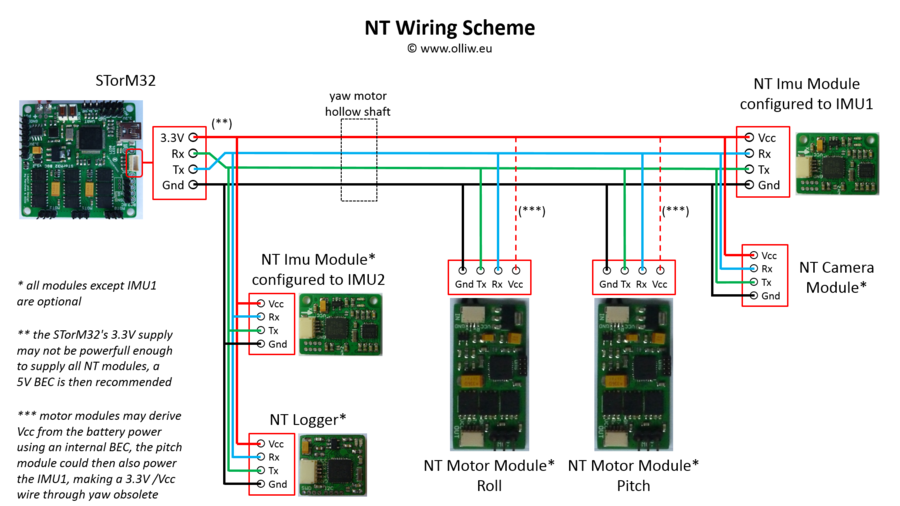
т.е и драйвера моторов и все датчики это теперь отдельные платы ? это ж где столько места взять под всё это дело
или можно только imu1 заменить ? а imu2 оставить тот что на плате? и использовать драйверы моторов тоже те что на плате ?
чё то я не много не въехал
все правильно… меняете imu1 на NT, прошиваетесь NT, все остальное по старому. Основное преимущество - датчик NT исключил все ошибки и неогрниченную длину проводов…
ясно, спасибо, а какой и где лучше брать датчик NT ?
не ужели теперь чтоб запустить надо кучу плат как вот на этой картинке
Там же около всех модулей стоит * и сноска “all modules except IMU1 are optional”